自定义步态¶
在之前的项目中,我们使用了很多我们自己写的动作,那么这些动作是如何组合和完成的呢?一般来说,一个动作由一个或多个步态组成。
在这个项目中,我们将学习如何自定义 PiSloth 的步态。
运行代码
cd /home/pi/pisloth/examples
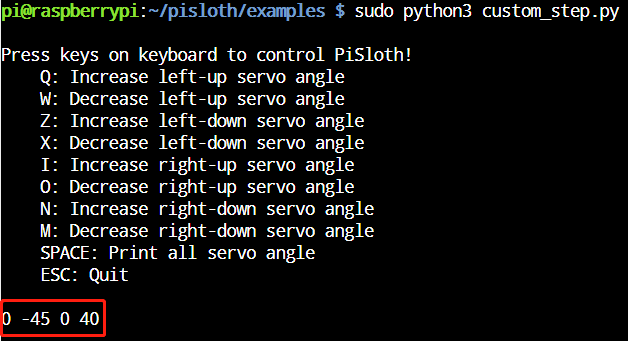
sudo python3 custom_step.py
代码运行后,按下以下按键来调整PiSloth的各个舵机的角度。
q: 增加左腿的角度
w: 减小左腿的角度
z: 增加左脚的角度
x: 减小左脚的角度
i: 增加右腿的角度
o: 减小右腿的角度
n: 增加右脚的角度
m: 减小右脚的角度
空格键: 打印所有角度
ESC: 退出
比如按 zx 键和 nm 键,我们让它做出做如图所示的步态。

此时按 空格键 打印4个舵机的角度。您需要记录这些角度值,这些值将在下一个项目 自定义动作 中使用。
代码
from pisloth import Sloth
# from robot_hat import Music
# from robot_hat import TTS
from robot_hat import PWM
from robot_hat import Servo
import sys
import tty
import termios
import time
sloth = Sloth([1,2,3,4])
# tts = TTS()
# music = Music()
sloth.set_offset([0,0,0,0])
right_leg_servo = Servo(PWM('P0'))
right_foot_servo = Servo(PWM('P1'))
left_leg_servo = Servo(PWM('P2'))
left_foot_servo = Servo(PWM('P3'))
def readchar():
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
try:
tty.setraw(sys.stdin.fileno())
ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
manual = '''
Press keys on keyboard to control PiSloth!
q: Increase the servo angle of the left leg
w: Decrease the servo angle of the left leg
z: Increase the servo angle of the left foot
x: Decrease the servo angle of the left foot
i: Increase the servo angle of the right leg
o: Decrease the servo angle of the right leg
n: Increase the servo angle of the right foot
m: Decrease the servo angle of the right foot
SPACE: Print all angle
ESC: Quit
'''
def main():
print(manual)
left_leg=0
left_foot=0
right_leg=0
right_foot=0
while True:
key = readchar().lower()
# print(key)
if key == "q":
left_leg = left_leg+5
elif key == "w":
left_leg = left_leg-5
elif key == "z":
left_foot = left_foot+5
elif key == "x":
left_foot = left_foot-5
elif key == "i":
right_leg = right_leg+5
elif key == "o":
right_leg = right_leg-5
elif key == "n":
right_foot = right_foot+5
elif key == "m":
right_foot = right_foot-5
elif key == chr(32): # 32 for space
print(right_leg,right_foot,left_leg,left_foot)
elif key == chr(27): # 27 for ESC
break
right_leg_servo.angle(right_leg)
right_foot_servo.angle(right_foot)
left_leg_servo.angle(left_leg)
left_foot_servo.angle(left_foot)
# time.sleep(0.05)
print("\nQuit")
if __name__ == "__main__":
main()