注釈
こんにちは!FacebookのSunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Communityへようこそ!Raspberry Pi、Arduino、ESP32を深く学び、仲間たちと一緒に探求していきましょう。
なぜ参加するのか?
専門的なサポート: コミュニティやチームのサポートで、購入後の問題や技術的な課題を解決できます。
学びと共有: ヒントやチュートリアルを交換し、スキルを向上させましょう。
独占的な先行公開: 新製品の発表や先取り情報に早期アクセスできます。
特別割引: 最新製品の特別割引を楽しめます。
祭りのプロモーションとギブアウェイ: ギブアウェイやホリデープロモーションに参加できます。
👉 私たちと一緒に探索し、創造を始めましょう![ここ]をクリックして、今すぐ参加してください!
2.10 人間の動きを検出する
このレッスンでは、Raspberry Pi Pico 2 Wを使用して パッシブ赤外線(PIR)センサー を使い、人間の動きを検出する方法を学びます。PIRセンサーは、セキュリティシステム、オートマチックライティング、その他動きの検出が必要な用途でよく使用されます。これらのセンサーは、暖かい物体(人間や動物など)から放射される赤外線を検出します。
必要な部品
このプロジェクトで必要な部品は以下の通りです。
全ての部品がセットになったキットを購入するのが便利です。こちらのリンクをご覧ください:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Pico 2 Wスターターキット |
450+ |
また、以下のリンクから部品を個別に購入することもできます。
SN |
コンポーネント |
数量 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
マイクロUSBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1 |
回路図
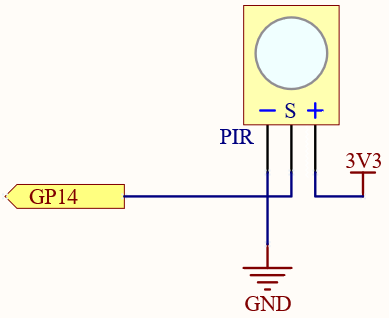
PIRモジュールが人が通り過ぎるのを検出すると、GP14がHIGHになります。それ以外の場合はLOWになります。
注釈
PIRセンサーには2つのポテンショメーターがあります:
感度調整: 検出範囲を制御します。
時間遅延調整: 動きが検出された後、出力がHIGHのままでいる時間を制御します。
初期テストでは、両方のポテンショメーターを反時計回りに最小位置に設定してください。これにより、センサーは最も感度が高く、最短の遅延設定になります。これで、すぐに反応を観察できます。

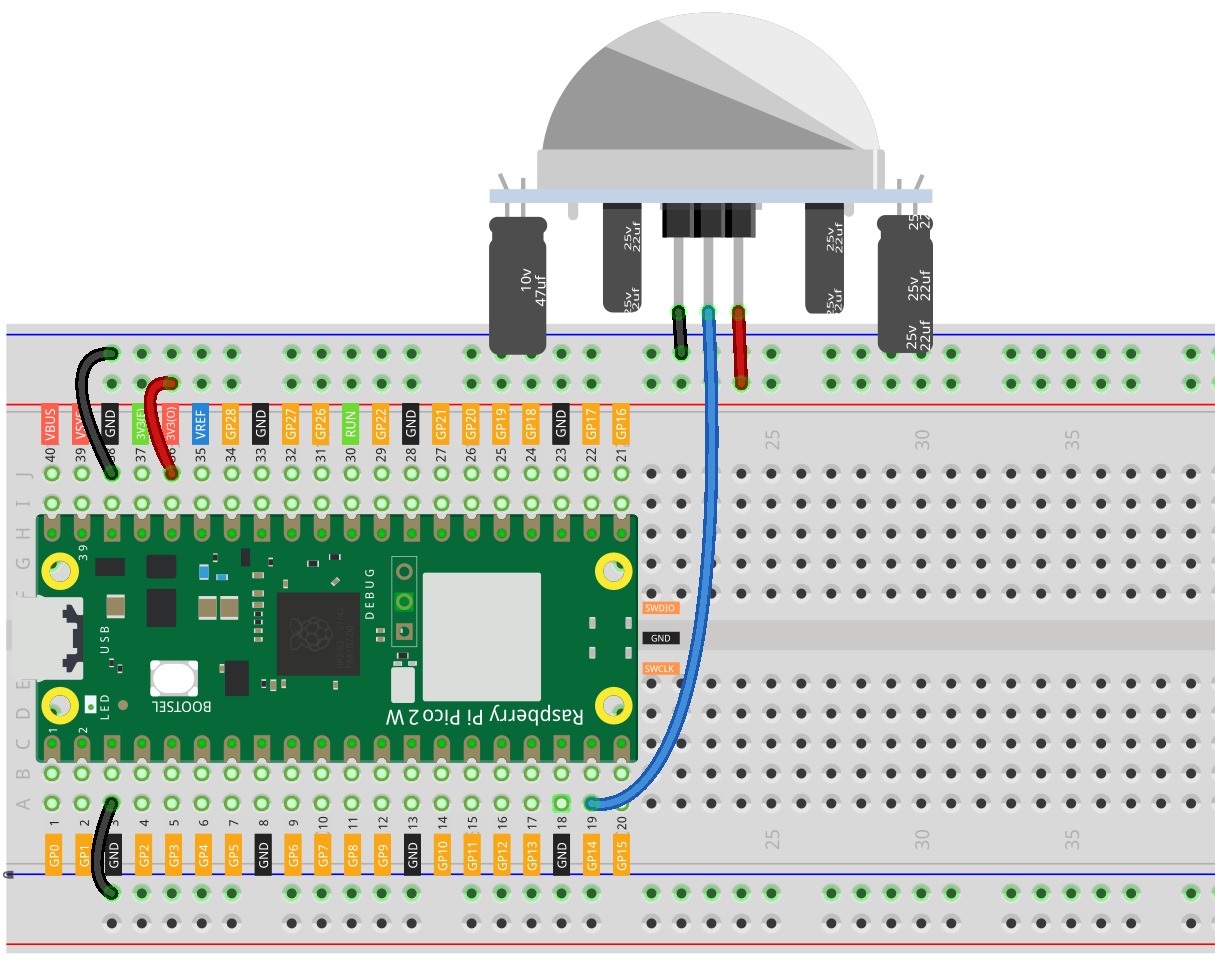
配線
コードの記述
動きを検出するために割り込みを使用し、動きが検出されるとメッセージを表示するMicroPythonプログラムを作成します。
注釈
pico-2w-kit-main/micropythonの2.10_detect_human_movement.pyファイルを開くか、以下のコードをThonnyにコピーします。次に「実行」をクリックするか、F5を押して実行します。Thonnyの右下に「MicroPython(Raspberry Pi Pico).COMxx」のインタープリタが選択されていることを確認してください。
import machine
import utime
# GP14を入力ピンとして初期化
pir_sensor = machine.Pin(14, machine.Pin.IN)
def motion_detected(pin):
print("Motion detected!")
# 立ち上がりエッジで割り込みを設定
pir_sensor.irq(trigger=machine.Pin.IRQ_RISING, handler=motion_detected)
# メインループは何もしません。割り込みが動作を処理します。
while True:
utime.sleep(1)
コードを実行すると、次の現象が観察されます:
PIRセンサーの前で動きます。
動きが検出されると、「Motion detected!」というメッセージがコンソールに表示されます。
コードの理解
モジュールのインポート:
import machine: ハードウェア関連の関数にアクセスします。import utime: 時間関連の関数を使用します。
PIRセンサーピンの初期化:
pir_sensor = machine.Pin(14, machine.Pin.IN): GP14を入力ピンとして設定します。
割り込みハンドラの定義:
def motion_detected(pin): 動きが検出されたときに呼ばれる関数。print("Motion detected!"): コンソールにメッセージを出力します。
割り込みの設定:
pir_sensor.irq(trigger=machine.Pin.IRQ_RISING, handler=motion_detected): PIRセンサーの信号の立ち上がりエッジで割り込みを設定します。
メインループ:
while True: 無限ループを開始します。utime.sleep(1): ループは1秒間スリープし、割り込みが動作を処理します。
動作時間を測定するためのコード例
コードを変更して、動作検出の時間と検出間隔を測定することができます。
import machine
import utime
pir_sensor = machine.Pin(14, machine.Pin.IN)
last_trigger_time = utime.ticks_ms()
def pir_triggered(pin):
global last_trigger_time
current_time = utime.ticks_ms()
duration = utime.ticks_diff(current_time, last_trigger_time)
last_trigger_time = current_time
if pir_sensor.value():
print("Motion detected! Duration since last detection: {} ms".format(duration))
else:
print("Motion ended. Duration of motion: {} ms".format(duration))
# 立ち上がりエッジと下降エッジの両方で割り込みを設定
pir_sensor.irq(trigger=machine.Pin.IRQ_RISING | machine.Pin.IRQ_FALLING, handler=pir_triggered)
while True:
utime.sleep(1)
両方のエッジでの割り込み:
machine.Pin.IRQ_RISING|machine.Pin.IRQ_FALLINGを使用して、立ち上がりエッジと下降エッジで割り込みを設定します。時間の追跡:
utime.ticks_ms()を使用して、現在の時間をミリ秒単位で取得します。トリガー間の時間を計算して、PIRセンサー出力が
HIGHまたはLOWの状態でいる時間を測定します。
実用的な応用
セキュリティシステム: 不正侵入者や許可されていない動きを検出します。
自動照明: 動きが検出されたときにライトをオンにします。
省エネルギー: 一定時間動きが検出されない場合にデバイスをオフにします。
トラブルシューティングのヒント
誤動作:
PIRセンサーは温度変化や日光などの環境要因に敏感です。
センサーを熱源や窓に向けて設置しないようにしましょう。
センサーが動きを検出しない:
センサーが初期化するまでに時間がかかる場合があります(一部のセンサーでは最大60秒かかることがあります)。
感度ポテンショメーターを調整します。
干渉:
センサーを電子機器から離して設置し、電磁干渉を避けます。
結論
PIRセンサーをRaspberry Pi Pico 2 Wに統合することで、プロジェクトに動作検出機能を追加する方法を学びました。センサー入力を読み取り、割り込みを処理する方法を理解することで、反応的で効率的なプログラムを作成できます。