注釈
こんにちは!FacebookのSunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Communityへようこそ!Raspberry Pi、Arduino、ESP32を他の愛好者と一緒に深く学びましょう。
参加する理由は?
専門的なサポート:購入後の問題や技術的な課題をコミュニティやチームの助けを借りて解決できます。
学びと共有:ヒントやチュートリアルを交換し、スキルを向上させましょう。
限定プレビュー:新製品の発表や先行公開をいち早くチェックできます。
特別割引:新しい製品に対して独占的な割引を楽しめます。
祭典のプロモーションやプレゼント:プレゼントや祝日プロモーションに参加しましょう。
👉 一緒に探求し、創造を楽しむ準備はできましたか?[ここ]をクリックして、今日から参加しましょう!
3.6 水ポンプの制御
このレッスンでは、 Raspberry Pi Pico 2 W と TA6586モータードライバー を使用して、 小型水ポンプ を制御する方法を学びます。小型の遠心ポンプは、自動植物水やりシステムやミニチュアの水景作りなどのプロジェクトに使用できます。ポンプの制御は、同じ原理を使用するDCモーターの制御と似ています。
必要なコンポーネント
このプロジェクトでは、以下のコンポーネントが必要です。
全セットを購入するのが便利なので、こちらのリンクをチェックしてください:
名前 |
このキットのアイテム |
購入リンク |
|---|---|---|
Pico 2 Wスターターキット |
450+ |
以下のリンクから、コンポーネントを個別に購入することもできます。
SN |
コンポーネント紹介 |
数量 |
購入リンク |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USBケーブル |
1 |
|
3 |
1 |
||
4 |
数個 |
||
5 |
1 |
||
6 |
1 |
||
7 |
Power Pack |
1 |
|
8 |
1 |
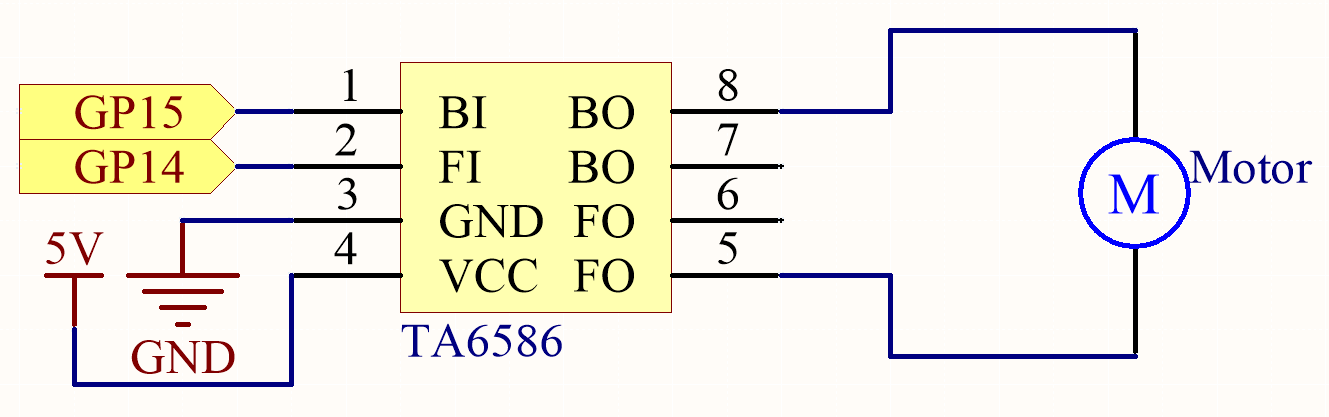
回路図
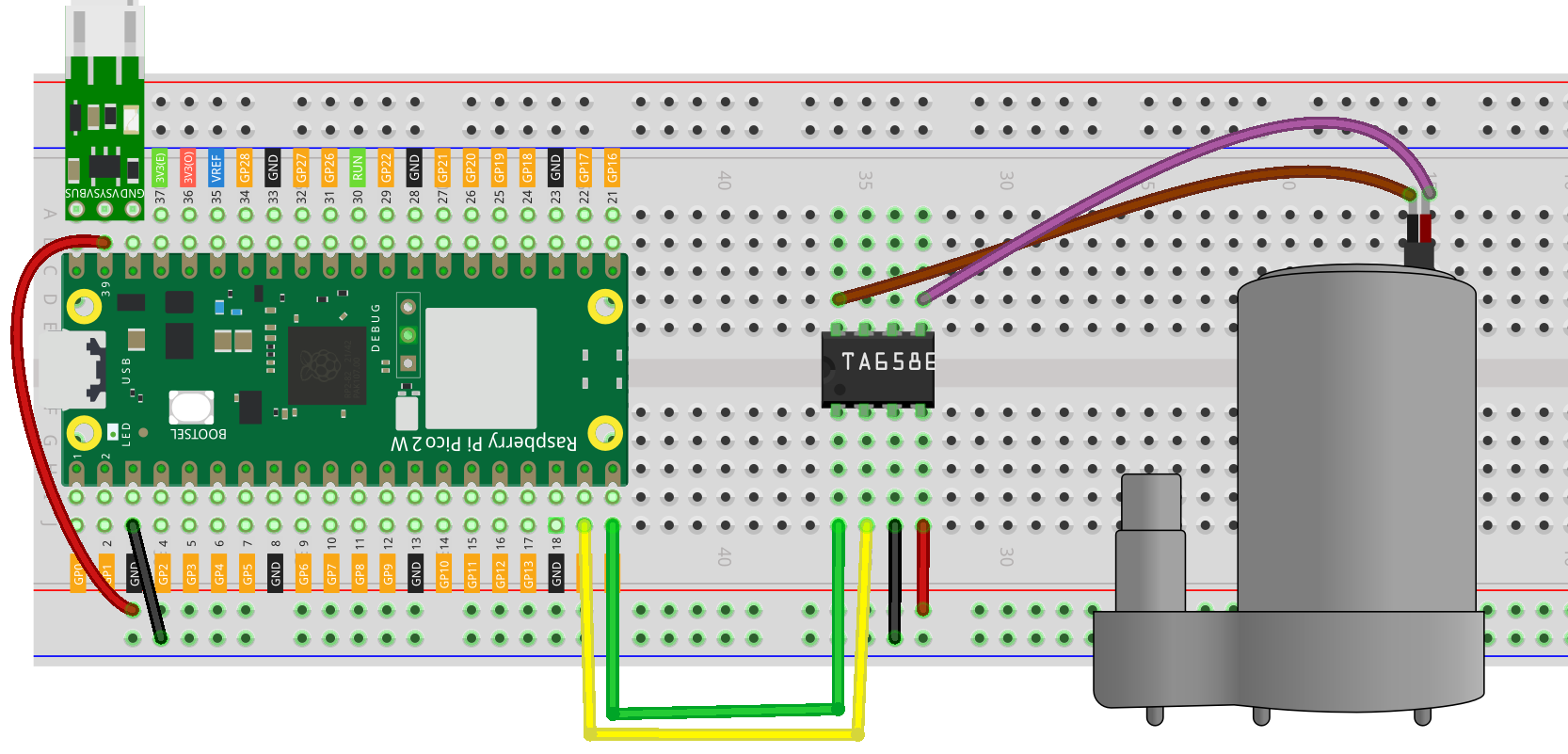
配線
注釈
ポンプは高電流を必要とするため、安全のためにLi-po充電モジュールを使用してモーターに電力を供給します。
Li-po充電モジュールが図に示された通りに接続されていることを確認してください。さもなければ、短絡が発生し、バッテリーや回路が損傷する可能性があります。
コード
注釈
pico-2w-kit-main/arduino/3.6_pumping内の3.6_pumping.inoファイルを開きます。または、このコードを Arduino IDE にコピーします。
アップロードボタンをクリックする前に、ボード(Raspberry Pi Pico)と適切なポートを選択するのを忘れないでください。
const int motor1A = 14; // モーター制御ピン1
const int motor2A = 15; // モーター制御ピン2
void setup() {
// モーター制御ピンを出力に設定
pinMode(motor1A, OUTPUT); // motor1Aを出力ピンとして設定
pinMode(motor2A, OUTPUT); // motor2Aを出力ピンとして設定
}
void loop() {
// モーターを時計回りに回転させる
digitalWrite(motor1A, HIGH); // motor1AをHIGHに設定(モーターの片側を作動させる)
digitalWrite(motor2A, LOW); // motor2AをLOWに設定(反対側を停止させる)
}
コードを実行すると、ポンプが動作し、チューブから水が流れ出すのが確認できます。 * このサイクルは無限に繰り返されます。 * 初めて水が流れない場合は、ポンプが水に浸かっており、チューブ内に気泡がないことを確認してください。
安全上の注意
水と電気:
Picoや他の電子部品には水をかけないように非常に注意してください。
必要に応じてすべての接続が安全で絶縁されていることを確認してください。
電源:
ポンプの電圧要件に合った電源を使用してください(通常は3V〜6V)。
Picoの3.3Vピンから直接ポンプに電力を供給しないでください。
電流の消費:
ポンプはかなりの電流を消費する可能性があります。
電源がポンプの電流要件に対応できることを確認してください。
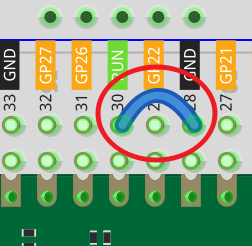
Picoのリセット:
ポンプを動かした後にコードのアップロードに問題が生じた場合は、RUNピンを一時的にGNDに接続してPicoを手動でリセットできます。
さらなる探求
自動植物水やり:
土壌の湿度センサーを組み合わせて、土壌の乾燥状態に基づいて水やりを自動化します。
PWM速度制御:
パルス幅変調(PWM)を使用して、ポンプの速度を電圧を調整して制御します。
タイミングとスケジューリング:
実時間時計やスケジューラーを使用して、より複雑なタイミングを実装します。
結論
このレッスンでは、Raspberry Pi PicoとTA6586モータードライバーを使用して小型水ポンプを制御する方法を学びました。この技術は、自動植物水やりシステム、噴水、または水耕栽培システムなど、さまざまなプロジェクトに利用できます。