注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Communityへようこそ!Raspberry Pi、Arduino、ESP32について、他の愛好者とともにさらに深く学びましょう。
なぜ参加するのか?
専門家のサポート: コミュニティやチームのサポートを受けて、購入後の問題や技術的な課題を解決できます。
学びと共有: スキルを向上させるためのヒントやチュートリアルを交換できます。
独占的なプレビュー: 新製品の発表や先取り情報をいち早くチェックできます。
特別割引: 最新製品に対する独占的な割引を楽しめます。
祭事プロモーションとプレゼント: ギブアウェイや休日のプロモーションに参加できます。
👉 一緒に探求し、創造しませんか?[ここ]をクリックして、今すぐ参加しましょう!
3.5 小型ファンの制御(DCモーター)
このレッスンでは、Raspberry Pi Pico 2 Wと TA6586モータードライバ を使用して、 DCモーター (小型ファンなど)を制御する方法を学びます。TA6586を使うことで、モーターの回転方向を時計回りと反時計回りに制御することができます。DCモーターはPicoが直接供給できる電流よりも多くの電流を必要とするため、モーターを安全に駆動するために外部電源を使用します。
必要な部品
このプロジェクトでは、以下の部品が必要です。
全体キットを購入するのが非常に便利です。リンクはこちらです:
名前 |
このキットに含まれるアイテム |
購入リンク |
|---|---|---|
Pico 2 W スターターキット |
450以上 |
以下のリンクから個別に購入することもできます。
SN |
部品紹介 |
数量 |
購入リンク |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1 |
||
6 |
1 |
||
7 |
1 |
||
8 |
Power Pack |
1 |
回路図
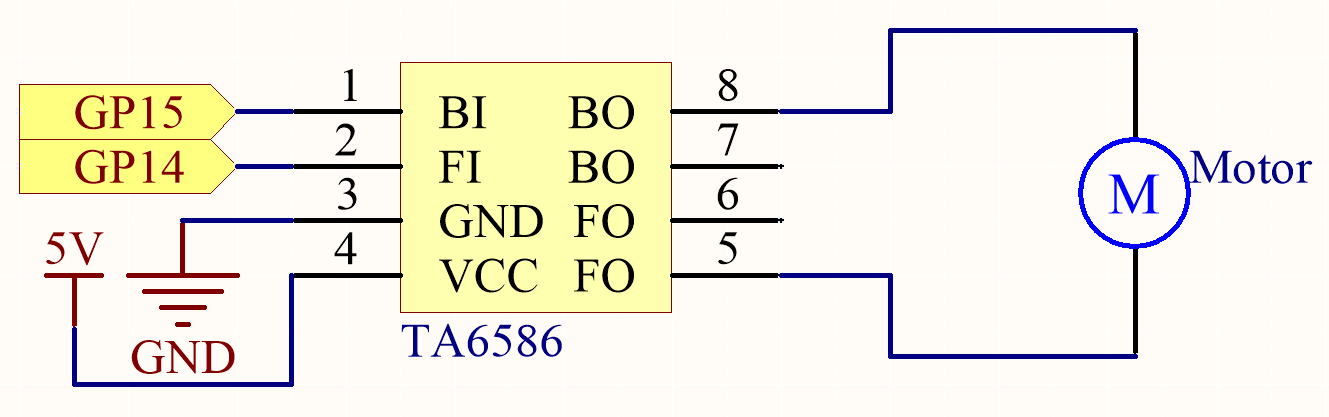
配線

コード
注釈
「
3.5_small_fan.ino」ファイルを「pico-2w-kit-main/arduino/3.5_small_fan」のパスで開きます。または、このコードを Arduino IDE にコピーしてください。
アップロードボタンをクリックする前に、Raspberry Pi Picoボードと正しいポートを選択してください。
// モータードライバに接続されたピンを定義
const int motor1A = 14; // モーター制御ピン1
const int motor2A = 15; // モーター制御ピン2
void setup() {
// モーター制御ピンをOUTPUTとして初期化
pinMode(motor1A, OUTPUT);
pinMode(motor2A, OUTPUT);
}
void loop() {
// モーターを時計回りに回転
clockwise();
delay(1000); // モーターを1秒間時計回りに回転
// モーターを停止
stopMotor();
delay(1000); // 1秒間停止
// モーターを反時計回りに回転
anticlockwise();
delay(1000); // モーターを1秒間反時計回りに回転
// モーターを停止
stopMotor();
delay(1000); // 1秒間停止
}
// モーターを時計回りに回転させる関数
void clockwise()
{
digitalWrite(motor1A, HIGH); // motor1AをHIGHに設定
digitalWrite(motor2A, LOW); // motor2AをLOWに設定
// この組み合わせでモーターが時計回りに回転します
}
// モーターを反時計回りに回転させる関数
void anticlockwise()
{
digitalWrite(motor1A, LOW); // motor1AをLOWに設定
digitalWrite(motor2A, HIGH); // motor2AをHIGHに設定
// この組み合わせでモーターが反時計回りに回転します
}
// モーターを停止させる関数
void stopMotor()
{
digitalWrite(motor1A, LOW); // motor1AをLOWに設定
digitalWrite(motor2A, LOW); // motor2AをLOWに設定
// 両方のピンをLOWに設定することでモーターを停止させます
}
コードをアップロードした後、モーターは定期的に前後に回転します。
コードの理解
制御ピンの定義:
const int motor1A = 14; // モーター制御ピン1 const int motor2A = 15; // モーター制御ピン2
ピンモードの設定:
void setup() { pinMode(motor1A, OUTPUT); pinMode(motor2A, OUTPUT); }
モーターの方向の制御:
時計回りの回転: motor1をHIGH、motor2AをLOWに設定し、モーターを時計回りに回転させます。
digitalWrite(motor1A, HIGH); // motor1AをHIGHに設定 digitalWrite(motor2A, LOW); // motor2AをLOWに設定
反時計回りの回転: motor1AをLOW、motor2AをHIGHに設定し、モーターを反時計回りに回転させます。
digitalWrite(motor1A, LOW); digitalWrite(motor2A, HIGH);
モーターを1秒間時計回りに回転させます
anticlockwise(); delay(1000);
モーターを1秒間反時計回りに回転させます
anticlockwise(); delay(1000);
モーターを停止させる:
両方のピンをLOWに設定してモーターを停止させます。
digitalWrite(motor1A, LOW); // motor1AをLOWに設定 digitalWrite(motor2A, LOW); // motor2AをLOWに設定
1秒間の停止
stopMotor(); delay(1000);
さらなる探索
速度制御:
PWM(パルス幅変調)を使用してモーターの速度を制御することができます。EN1ピンをPWM対応のGPIOピンに接続し、デューティサイクルを変更します。
センサー統合:
センサー(例:リミットスイッチ、エンコーダ)を組み合わせて、より高度なモーター制御システムを作成します。
安全上の注意
電源:
外部電源の電圧がモーターの電圧定格と一致していることを確認してください。
Picoの3.3Vピンからモーターを直接駆動しないでください。
電流消費:
モーターは特に起動時や停止時に大きな電流を消費することがあります。
電源がモーターの電流要求に対応できることを確認してください。
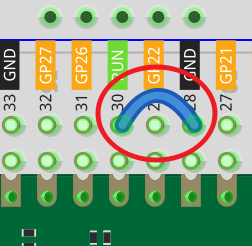
Picoのリセット:
モーターの電流消費が原因で電圧が低下し、Picoがリセットされたり切断されたりする場合があります。
モーターを動作させた後にコードのアップロードに問題が生じた場合は、RUNピンをGNDに一時的に接続して手動でPicoをリセットできます。
結論
このレッスンでは、Raspberry Pi PicoとTA6586モータードライバを使用してDCモーターを制御する方法を学びました。TA6586への入力制御を行うことで、モーターの回転方向を変更できます。この基本的な概念は、ロボティクスや自動化、モーターを使った多くのアプリケーションで不可欠です。