Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Vertiefe dich mit anderen Enthusiasten in Raspberry Pi, Arduino und ESP32.
Warum beitreten?
Expertenunterstützung: Löse Probleme nach dem Verkauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühen Zugang zu neuen Produktankündigungen und Einblicken.
Spezielle Rabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Promotionen und Gewinnspiele: Nimm an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu erkunden und zu kreieren? Klicke auf [hier] und tritt heute bei!
6.1 Distanzmessung
In dieser Lektion lernen wir, wie man ein Ultraschallsensormodul mit dem Raspberry Pi Pico 2 W verwendet, um die Distanz zu einem Objekt zu messen. Ultraschallsensoren werden häufig in der Robotik und in Automatisierungssystemen für die Objekterkennung und Distanzmessung eingesetzt.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein ganzes Kit zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
Pico 2 W Starter Kit |
450+ |
Du kannst sie auch einzeln über die untenstehenden Links kaufen.
SN |
KOMPONENTE |
MENGE |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 |
Verständnis des Ultraschallsensors
Der Ultraschallsensor funktioniert, indem er einen kurzen Ultraschallimpuls vom Trig-Pin aussendet und das Echo am Echo-Pin empfängt. Indem die Zeit gemessen wird, die das Echo zur Rückkehr benötigt, können wir die Distanz zu einem Objekt unter Verwendung der Schallgeschwindigkeit berechnen.

Triggerimpuls: Ein 10-Mikrosekunden hoher Impuls am Trig-Pin startet die Messung.
Ultraschallburst: Der Sensor sendet einen 8-Zyklen-Ultraschallburst bei 40 kHz aus.
Echoempfang: Der Echo-Pin wird hoch und bleibt hoch, bis das Echo zurückkommt.
Zeitmessung: Durch Messung der Zeit, die der Echo-Pin hoch bleibt, können wir die Distanz berechnen.
Schaltplan
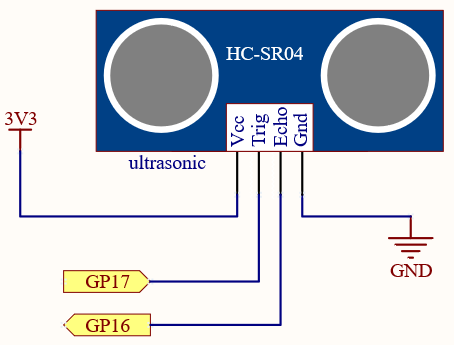
Verdrahtung

Schreiben des Codes
Lass uns ein MicroPython-Programm schreiben, um die Distanz mit dem Ultraschallsensor zu messen.
Bemerkung
Öffne die Datei
6.1_measuring_distance.pyauspico-2w-kit-main/micropythonoder kopiere den Code in Thonny, dann klicke auf „Ausführen“ oder drücke F5.Stelle sicher, dass der richtige Interpreter ausgewählt ist: MicroPython (Raspberry Pi Pico).COMxx.
import machine
import utime
# Definiere die Pins, die mit dem Sensor verbunden sind
TRIG = machine.Pin(17, machine.Pin.OUT)
ECHO = machine.Pin(16, machine.Pin.IN)
def measure_distance():
# Stelle sicher, dass der Trigger-Pin niedrig ist
TRIG.low()
utime.sleep_us(2)
# Sende einen 10µs-Impuls, um die Messung zu starten
TRIG.high()
utime.sleep_us(10)
TRIG.low()
# Warte darauf, dass der Echo-Pin hoch geht (Start des Echo-Impulses)
while ECHO.value() == 0:
pass
start_time = utime.ticks_us()
# Warte darauf, dass der Echo-Pin niedrig geht (Ende des Echo-Impulses)
while ECHO.value() == 1:
pass
end_time = utime.ticks_us()
# Berechne die Dauer des Echo-Impulses
duration = utime.ticks_diff(end_time, start_time)
# Berechne die Distanz (Schallgeschwindigkeit ist 34300 cm/s)
distance = (duration * 0.0343) / 2
return distance
while True:
dist = measure_distance()
print("Distance: {:.2f} cm".format(dist))
utime.sleep(0.5)
Sobald der Code läuft, sollte die Thonny-Konsole die Distanzmessungen in Zentimetern anzeigen. Bewege ein Objekt näher oder weiter vom Sensor entfernt, um zu sehen, wie sich die Messwerte ändern.
Verständnis des Codes
Importiere notwendige Module und richte die Trigger- und Echo-Pins ein:
import machine import utime TRIG = machine.Pin(17, machine.Pin.OUT) ECHO = machine.Pin(16, machine.Pin.IN)
Messung der Distanz:
Sendet einen Triggerimpuls, um die Messung zu starten.
Wartet auf die Echoantwort.
Berechnet die Dauer des Echoimpulses.
Berechnet die Distanz unter Verwendung der Schallgeschwindigkeit.
def measure_distance(): # Stelle sicher, dass der Trigger niedrig ist TRIG.low() utime.sleep_us(2) # Löse einen 10µs-Impuls aus TRIG.high() utime.sleep_us(10) TRIG.low() # Warte auf den Beginn des Echos while ECHO.value() == 0: pass start_time = utime.ticks_us() # Warte auf das Ende des Echos while ECHO.value() == 1: pass end_time = utime.ticks_us() # Berechne die Dauer duration = utime.ticks_diff(end_time, start_time) # Berechne die Distanz distance = (duration * 0.0343) / 2 return distance
Hauptprogrammschleife:
Misst kontinuierlich und gibt die Distanz aus.
Pausiert eine halbe Sekunde zwischen den Messungen.
while True: dist = measure_distance() print("Distance: {:.2f} cm".format(dist)) utime.sleep(0.5)
Verständnis der Einschränkungen
Blockierender Code:
Die While-Schleifen, die auf das Echo warten, können andere Codeausführungen blockieren.
Für fortgeschrittenere Anwendungen sollten Interrupts oder asynchrone Programmierung in Betracht gezogen werden, um Blockierungen zu vermeiden.
Messbereich:
Der HC-SR04-Sensor hat typischerweise einen Bereich von 2 cm bis 400 cm.
Objekte, die näher als 2 cm oder weiter als 400 cm sind, werden möglicherweise nicht genau erkannt.
Umweltfaktoren:
Temperatur und Luftfeuchtigkeit können die Schallgeschwindigkeit beeinflussen.
Für präzise Messungen sollte die Schallgeschwindigkeit basierend auf den Umgebungsbedingungen angepasst werden.
Fazit
Du hast erfolgreich einen Ultraschallsensor verwendet, um mit dem Raspberry Pi Pico 2 W Distanzen zu messen. Diese grundlegende Fähigkeit ist weit verbreitet in der Robotik, Automatisierung und bei interaktiven Projekten anwendbar.