Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in die Welt von Raspberry Pi, Arduino und ESP32 ein und tausche dich mit anderen Technikbegeisterten aus.
Warum beitreten?
Expertenunterstützung: Erhalte Hilfe bei technischen Herausforderungen und Fragen nach dem Kauf von unserer Community und unserem Team.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu erweitern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Previews.
Spezielle Rabatte: Profitiere von exklusiven Vergünstigungen für unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nimm an Verlosungen und saisonalen Promotions teil.
👉 Bereit, mit uns zu entdecken und zu kreieren? Klicke auf [hier] und tritt noch heute bei!
6.3 6-Achsen-Bewegungserfassung
In dieser Lektion lernen wir, wie der MPU-6050 6-Achsen-Bewegungssensor mit dem Raspberry Pi Pico 2 W verbunden wird. Der MPU-6050 kombiniert ein 3-Achsen-Gyroskop und einen 3-Achsen-Beschleunigungssensor und überträgt die Rohsensordaten über das I2C-Kommunikationsprotokoll.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist praktisch, ein komplettes Kit zu kaufen – hier ist der Link:
Name |
ENTHALTENE ARTIKEL IM KIT |
LINK |
|---|---|---|
Pico 2 W Starter Kit |
450+ |
Alternativ kannst du die Komponenten auch einzeln über die unten stehenden Links erwerben.
SN |
KOMPONENTE |
MENGE |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 |
Den MPU-6050-Sensor verstehen
Der MPU-6050-Sensor wird häufig in Projekten zur Bewegungserfassung und Lagebestimmung eingesetzt, z. B. in Drohnen, Robotern und Gaming-Controllern.
Beschleunigungssensor: Misst die Beschleunigungskräfte entlang der X-, Y- und Z-Achsen, einschließlich der Gravitationsbeschleunigung, um Neigung und Ausrichtung des Sensors zu bestimmen.
Gyroskop: Misst die Rotationsgeschwindigkeit um die X-, Y- und Z-Achsen und liefert Informationen darüber, wie schnell sich der Sensor dreht.
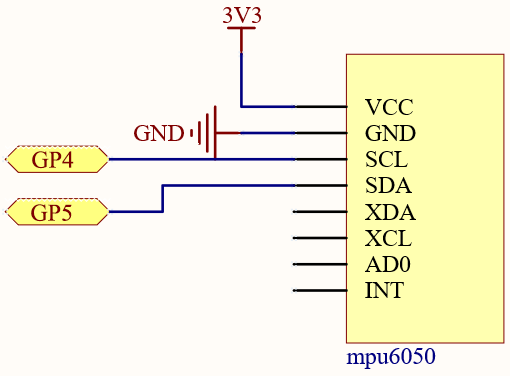
Schaltplan
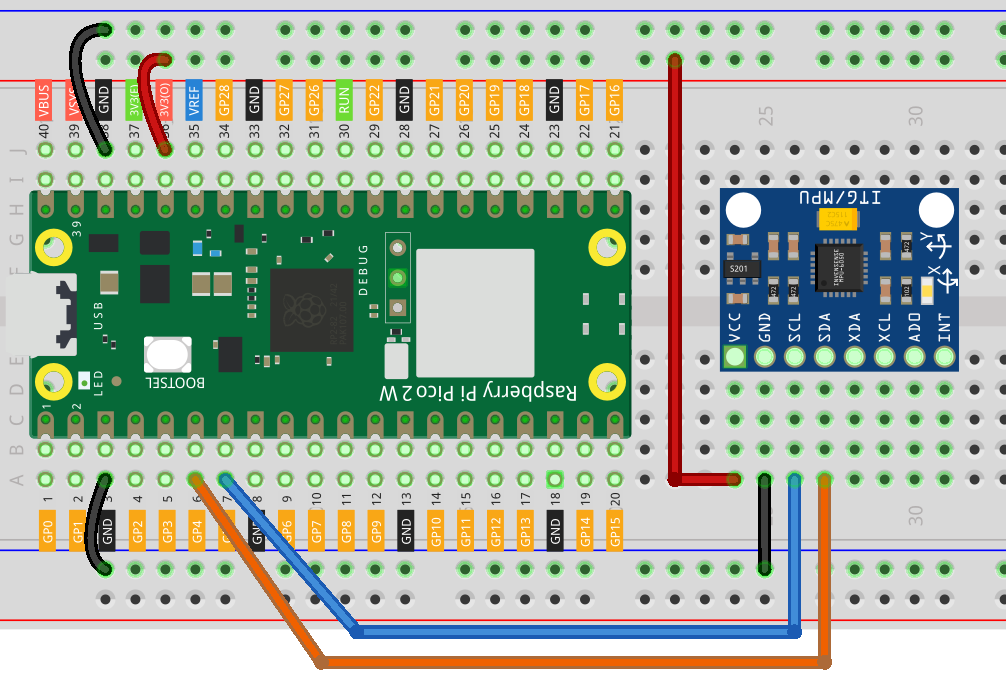
Verkabelung
Code schreiben
Wir schreiben ein MicroPython-Skript, um Beschleunigungs- und Gyroskopdaten vom MPU-6050-Sensor auszulesen.
Bemerkung
Öffne die Datei
6.3_6axis_motion_tracking.pyauspico-2w-kit-main/micropythonoder kopiere den Code in Thonny, klicke auf „Run“ oder drücke F5.Stelle sicher, dass der richtige Interpreter ausgewählt ist: MicroPython (Raspberry Pi Pico).COMxx.
Du benötigst die Dateien
imu.pyundvector3d.py– überprüfe, ob sie auf den Pico hochgeladen wurden. Eine detaillierte Anleitung findest du unter 1.4 Bibliotheken auf den Pico hochladen.
from machine import I2C, Pin
import utime
from imu import MPU6050
# Initialisierung der I2C-Schnittstelle (I2C0) mit SDA auf GP4 und SCL auf GP5
i2c = I2C(0, sda=Pin(4), scl=Pin(5), freq=400000)
# Initialisierung des MPU-6050-Sensors
mpu = MPU6050(i2c)
def read_accelerometer():
"""Reads accelerometer data and returns it as a tuple (x, y, z)."""
accel = mpu.accel
return accel.x, accel.y, accel.z
def read_gyroscope():
"""Reads gyroscope data and returns it as a tuple (x, y, z)."""
gyro = mpu.gyro
return gyro.x, gyro.y, gyro.z
def main():
"""Main loop to read and print sensor data."""
while True:
# Beschleunigungsdaten lesen
ax, ay, az = read_accelerometer()
print("Accelerometer (g) - X: {:.3f}, Y: {:.3f}, Z: {:.3f}".format(ax, ay, az))
# Pause for readability
utime.sleep(0.5)
# Gyroskopdaten lesen
gx, gy, gz = read_gyroscope()
print("Gyroscope (°/s) - X: {:.3f}, Y: {:.3f}, Z: {:.3f}".format(gx, gy, gz))
# Pause before the next set of readings
utime.sleep(0.5)
# Hauptfunktion ausführen
if __name__ == "__main__":
main()
Das Skript gibt alle 0,5 Sekunden die Beschleunigungs- und Gyroskopwerte aus.
Sensor-Daten verstehen
Beschleunigungsausgabe:
Accelerometer (g) - X: 0.000, Y: 0.000, Z: 1.000
Im Ruhezustand sollten X- und Y-Werte nahe 0 g liegen, während der Z-Wert aufgrund der Erdanziehung etwa 1 g beträgt.
Gyroskopausgabe:
Gyroscope (°/s) - X: 0.000, Y: 0.000, Z: 0.000
Im Stillstand sollten die Gyroskopwerte nahe 0 °/s liegen. Beim Drehen des Sensors ändern sich die Werte entsprechend der Winkelgeschwindigkeit.
Code verstehen
Importe und Setup:
machine.I2Cundmachine.Pin: Hardware-Schnittstelleutime: ZeitfunktionenMPU6050: Sensor-Klasse aus derimu.py-Bibliothek
I2C-Initialisierung:
Konfiguration des I2C-Busses 0 mit SDA auf GP4 und SCL auf GP5 bei einer Frequenz von 400 kHz.
i2c = I2C(0, sda=Pin(4), scl=Pin(5), freq=400000)
Sensorinitialisierung:
Erstellt eine Instanz des MPU-6050-Sensors über die I2C-Schnittstelle.
mpu = MPU6050(i2c)
Beschleunigungssensordaten auslesen:
Greift auf die Beschleunigungswerte zu und gibt die X-, Y- und Z-Werte zurück.
def read_accelerometer(): accel = mpu.accel return accel.x, accel.y, accel.z
Gyroskopdaten auslesen:
Greift auf die Gyroskopwerte zu und gibt die X-, Y- und Z-Werte zurück.
def read_gyroscope(): gyro = mpu.gyro return gyro.x, gyro.y, gyro.z
Hauptschleife:
Liest die Beschleunigungsdaten aus und gibt sie aus.
Wartet 0,5 Sekunden.
Liest die Gyroskopdaten aus und gibt sie aus.
Wartet weitere 0,5 Sekunden und wiederholt den Vorgang.
def main(): while True: # Beschleunigungsdaten auslesen und ausgeben ax, ay, az = read_accelerometer() print("Accelerometer (g) - X: {:.3f}, Y: {:.3f}, Z: {:.3f}".format(ax, ay, az)) utime.sleep(0.5) # Gyroskopdaten auslesen und ausgeben gx, gy, gz = read_gyroscope() print("Gyroscope (°/s) - X: {:.3f}, Y: {:.3f}, Z: {:.3f}".format(gx, gy, gz)) utime.sleep(0.5)
Programmeinstiegspunkt:
Stellt sicher, dass
main()ausgeführt wird, wenn das Skript direkt gestartet wird.if __name__ == "__main__": main()
Weitere Experimente
Fokus auf einen Sensor: Um entweder den Beschleunigungssensor oder das Gyroskop zu analysieren, kannst du die entsprechenden print-Anweisungen auskommentieren.
Datenvisualisierung: Nutze Tools oder Software, um die Sensordaten in Echtzeit zu plotten und besser zu analysieren.
Orientierungsberechnung: Implementiere Algorithmen zur Berechnung von Neigungs- und Rollbewegungen anhand der Beschleunigungsdaten.
Bewegungserkennung: Entwickle ein Programm, das bei Überschreiten bestimmter Bewegungsschwellen eine Aktion ausführt.
Sensordaten verstehen
Beschleunigungssensor:
Misst Beschleunigungskräfte in g (Gravitationskraft).
Nützlich zur Erkennung von Ausrichtung, Neigung und linearer Bewegung.
Gyroskop:
Misst die Rotationsgeschwindigkeit in Grad pro Sekunde (°/s).
Nützlich zur Erfassung von Drehbewegungen und Winkelgeschwindigkeiten.
Fehlersuche & Tipps
Keine Ausgabe oder Fehler:
Überprüfe die Verkabelung, insbesondere die SDA- und SCL-Leitungen.
Stelle sicher, dass der Sensor korrekt mit Strom versorgt wird.
Statische Werte:
Falls sich die Werte beim Bewegen des Sensors nicht ändern, prüfe die Kabelverbindungen.
Vergewissere dich, dass die korrekte I2C-Adresse verwendet wird.
Inkonsistente Messwerte:
Umgebungserschütterungen können die Sensorwerte beeinflussen.
Stelle den Sensor auf eine stabile Oberfläche während der Messungen.
Fazit
In dieser Lektion hast du gelernt, wie der MPU-6050-Beschleunigungs- und Gyroskopsensor mit dem Raspberry Pi Pico 2 W verbunden wird. Durch das Auslesen der Rohsensordaten kannst du eine Vielzahl von Anwendungen zur Bewegungserfassung und Orientierungserkennung entwickeln.