Nota
Ciao, benvenuto nella community di appassionati di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato ai nuovi annunci di prodotto e anteprime esclusive.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e giveaway: Partecipa a promozioni e omaggi durante le festività.
👉 Sei pronto a esplorare e creare con noi? Clicca [here] e unisciti oggi stesso!
Regolazione del Servo (Importante)
Nota
Se il tuo Robot HAT è la versione V44 o superiore (con l’altoparlante posizionato nella parte superiore della scheda) e include un pulsante Zero integrato, puoi saltare questo passaggio e premere semplicemente il pulsante Zero per attivare il programma di azzeramento del servo.

L’intervallo di angolazione del servo è -90~90, ma l’angolo impostato in fabbrica è casuale: potrebbe essere 0°, oppure 45°. Se lo assembliamo direttamente con un angolo di questo tipo, dopo l’esecuzione del codice del robot si verificherà uno stato caotico o, peggio ancora, il servo potrebbe bloccarsi e bruciarsi.
Per questo motivo è necessario impostare tutti i servi a 0° prima di installarli, in modo che l’angolo del servo sia centrato, indipendentemente dalla direzione di rotazione.
Per assicurarti che il servo sia stato correttamente impostato a 0°, inserisci prima il braccio del servo sull’albero del servo e poi ruota delicatamente il braccio oscillante verso un angolo diverso. Questo braccio del servo serve solo a permetterti di vedere chiaramente che il servo sta ruotando.

Ora esegui
servo_zeroing.pynella cartellaexample/.cd ~/picar-x/example sudo python3 servo_zeroing.py
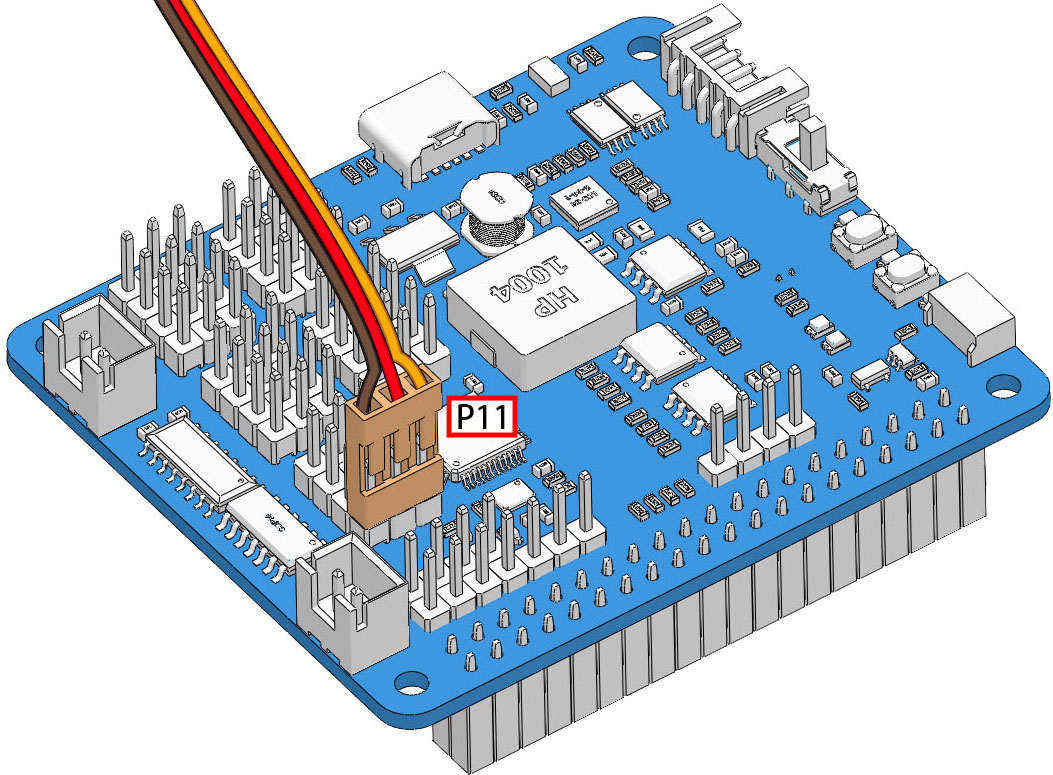
Successivamente, collega il cavo del servo alla porta P11 come mostrato di seguito; allo stesso tempo vedrai il braccio del servo ruotare in una posizione (questa è la posizione 0°, che è casuale e potrebbe non essere verticale o parallela).
Ora rimuovi il braccio del servo, assicurandoti che il cavo del servo rimanga collegato e senza spegnere l’alimentazione. Quindi continua l’assemblaggio seguendo le istruzioni cartacee.
Nota
Non scollegare il cavo del servo prima di fissarlo con la vite del servo; puoi scollegarlo dopo averlo fissato.
Non ruotare il servo mentre è alimentato per evitare danni; se l’albero del servo non è inserito con l’angolazione corretta, estrai il servo e reinseriscilo.
Prima di assemblare ciascun servo, è necessario collegare il cavo del servo alla porta P11 e accendere l’alimentazione per impostare il suo angolo a 0°.