遠隔操作¶
これはこれから行うことである:
Raspberry Piを server として使う。車を制御し、カメラでキャプチャした画像を送信するためのAPIを使用してWebサーバーを実行する。
次に、PC、携帯電話、タブレットを client として、カメラから画像を取得し、WebサーバーのAPIを呼び出して車を制御します。
その後、再び車の電源を入れてください。最初のテストに時間がかかるため、Raspberry Piの電源アダプターを使用して車に電源を供給することも勧める。
サーバーを実行する(Raspberry Piでの操作)¶
Raspberry Piにリモートでログインする。remote_control ディレクトリの下で起動スクリプト start を実行して、Webサービスを開始する。
cd ~/SunFounder_PiCar-V/remote_control
python3 manage.py migrate
sudo ./start
スクリプトがサービスを有効にし、対応するデータが表示される。同時にハードウェアが初期化されるため、前輪に接続されているサーボとパン&チルトが回転し、ハードウェアの初期化が完了したことを示す。
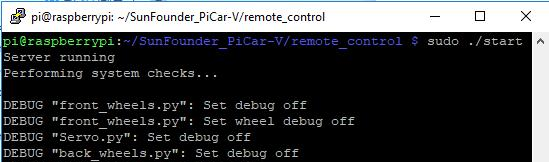
上記のような結果が得られれば、サーバーは準備できた。次に、クライアントを起動する。
警告
クライアントの実行を停止するまで、サーバーをいつも動作させる。
クライアントの実行(PCでの操作)¶
http://<RPi_IP_address>:8000/ で車のサーバに訪問する。ウェルカムページが表示される:
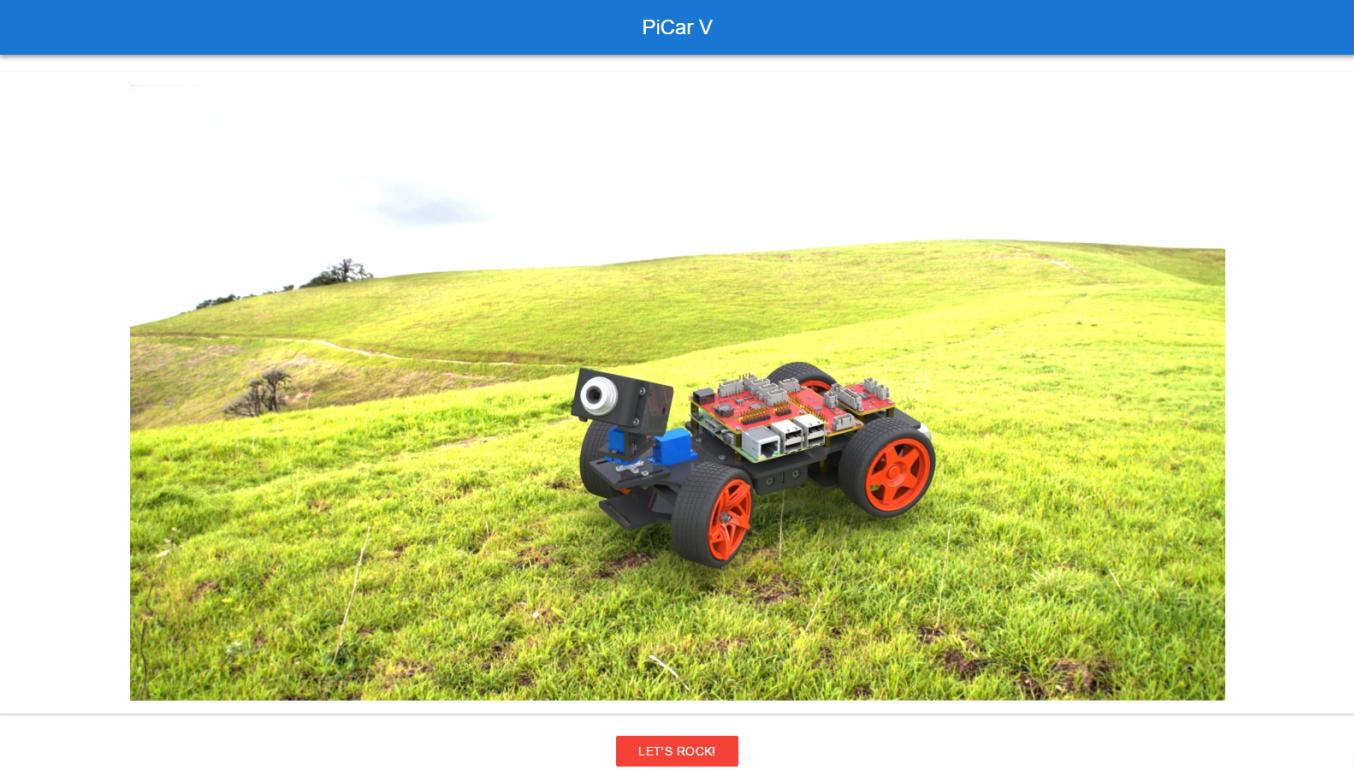
LET'S ROCKをクリックして、操作インターフェイスに入る。
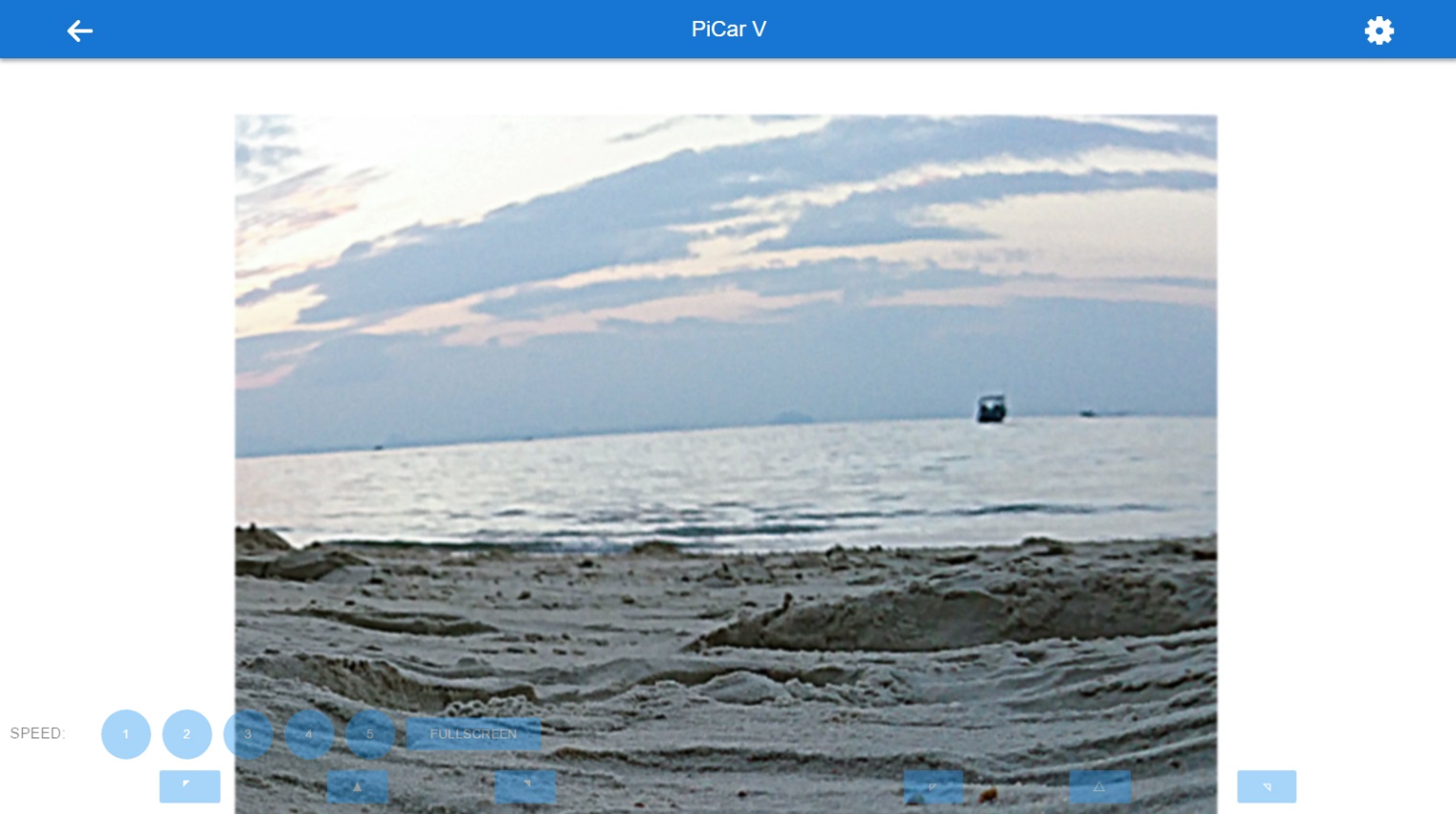
このページでは、キーボードの W、A、S、D キーを押して、車を**前方**、後方、左折、右折 に制御したり、矢印キーを押してカメラの移動を制御したりすることができ、数値 1〜5 は速度レベルを変更する。
補正
もう一度 FULLSCREEN をクリックして、タイトルバーを表示する。次に、ページの右上隅にある設定ボタンをタップして、補正ページに進む。
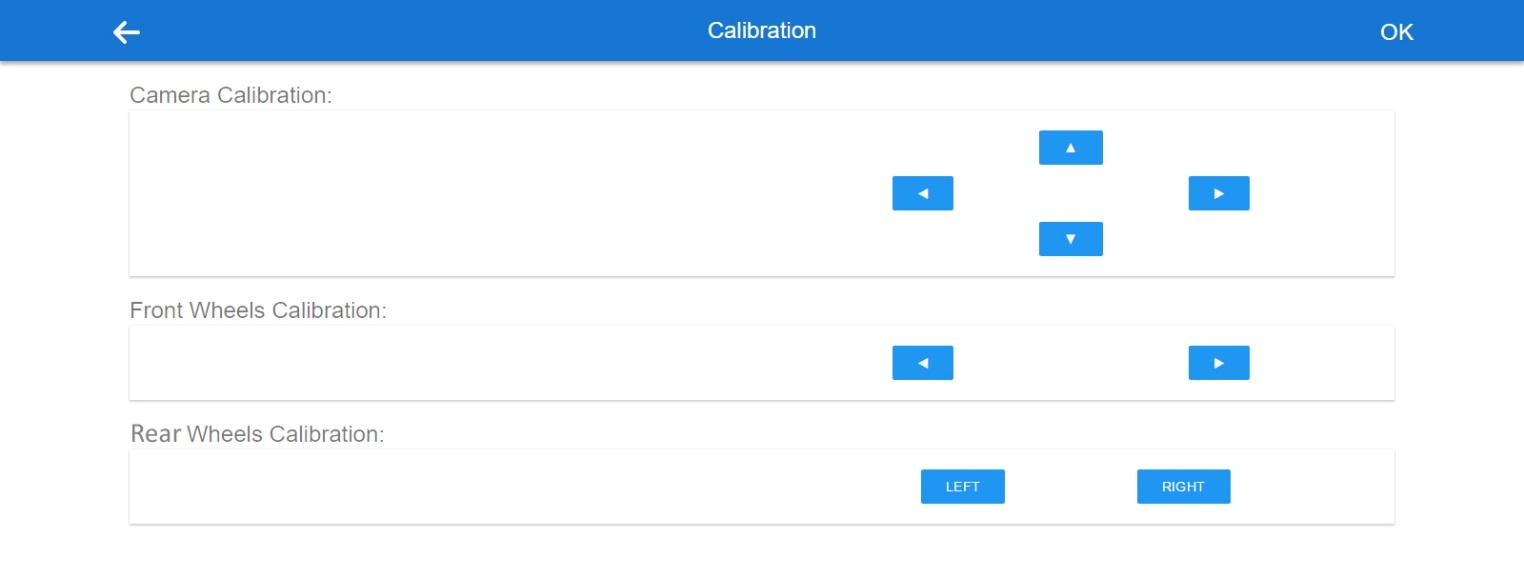
補正には、カメラ補正、前輪補正、後輪補正 の3つの部分が含まれている。
このページに入ると、車が前進する。そうでない場合は、後輪補正 の 左**と **右 をクリックして、ホイールの角度を調整する。
注釈
ボタンを押すたびに角度が少しずつ変化する。時間あたりの変化を大きくするには、ボタンを長押ししてください。
すべての補正が完了したら、OK をクリックして結果を保存する。
携帯電話用
また、携帯電話の場合は、FULLSCREEN ボタンをタップすると、表示とパフォーマンスが向上する。次に、ページ上の5つの速度レベルのボタンをタップして速度を制御し、矢印ボタンを押して車の方向とパン&チルトを制御する。ただし、一度 にタブできるのは1つのタッチポイントのみである。

Android操作システムのスマートフォンから次のスクリーンショットを取得する。
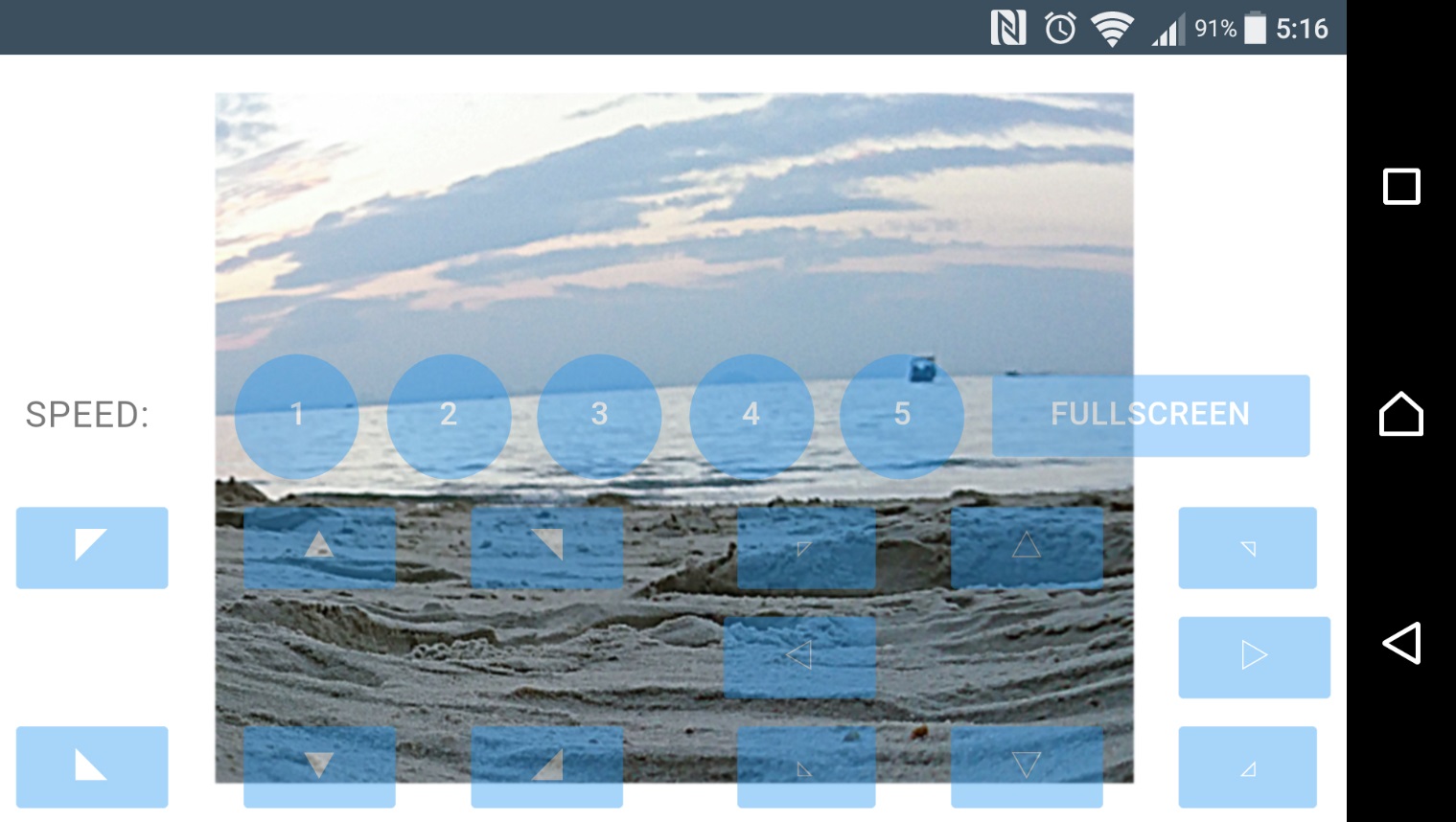
見た目はPCほど良くないかもしれないが、以降の更新は Github で不定期にリリースされる可能性がある。リポジトリを使い、変更を加えたプルリクエストを送信してください。テスト後に問題がなければ、リクエストを知ることは楽しみである。