組み立てを続ける¶
警告
バッテリーを取り付けて電源スイッチをONにスライドさせてから、組み立てのプロセス全体でサーボインストールを実行し続けてください。
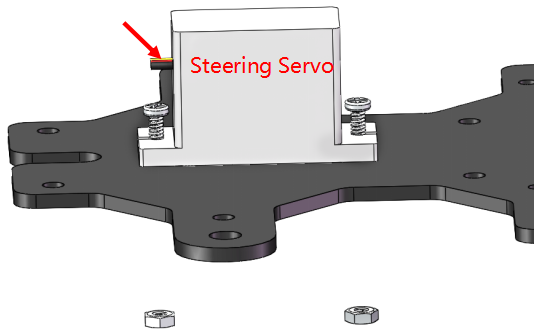
ステアリングサーボの組み立て¶
2つの M2x8ネジ と M2ナット を使ってステアリングサーボを上部プレートに取り付ける(サーボワイヤーの方向に注意してください)。
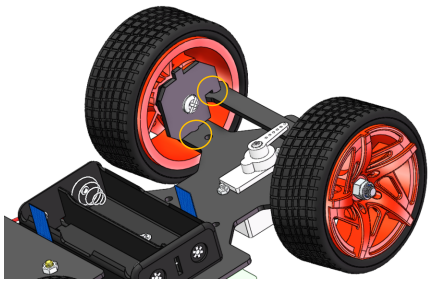
フロントハーフシャーシ¶
ロッカーアーム固定ネジ**(最短)で **ステアリングリンケージ をロッカーアームに接続する。
ホイールを上部プレートに入念に取り付ける。
4つの M3x25銅製スタンドオフ と M3ナットでフロントハーフシャーシ を組み立てる。
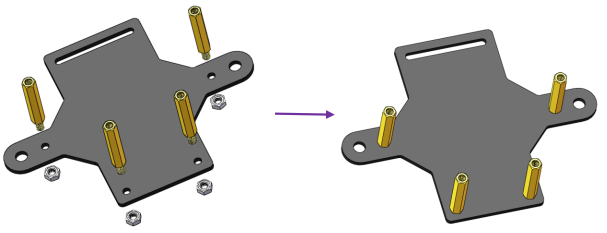
次に、組み立てられたフロントハーフシャーシを、スタンドオフを穴に合わせている上部プレートに置く。
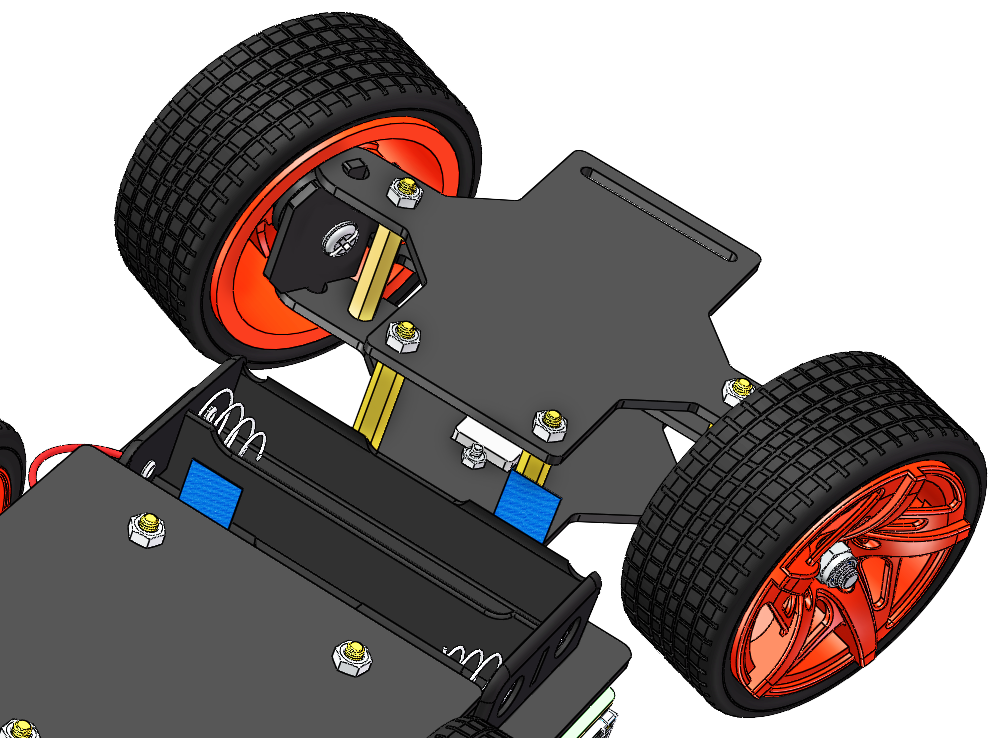
入念に持ち、上下を逆にして、4本の M3x8ネジ でスタンドオフと上部プレートを固定する。
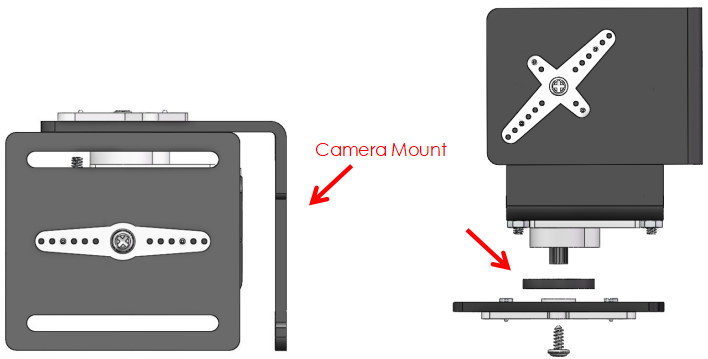
以下に示すように、組み立てられた パン&チルトプレート、ガスケットプレート と カメラマウントプレート を ロッカーアーム固定ネジ で固定角度で組み立てる:
注釈
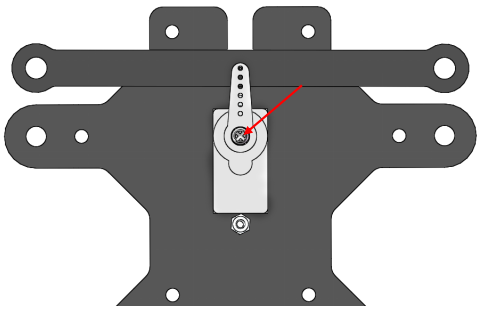
サーボが故障した場合、手でサーボを回さないでください。
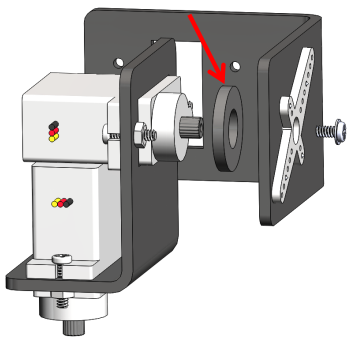
同様に、サーボシャフトが90度に回転していることを確認する。次に、以下に示す角度で、パン&チルトベースプレート を ロッカーアーム固定ネジ と ガスケットプレート で組み立てる。
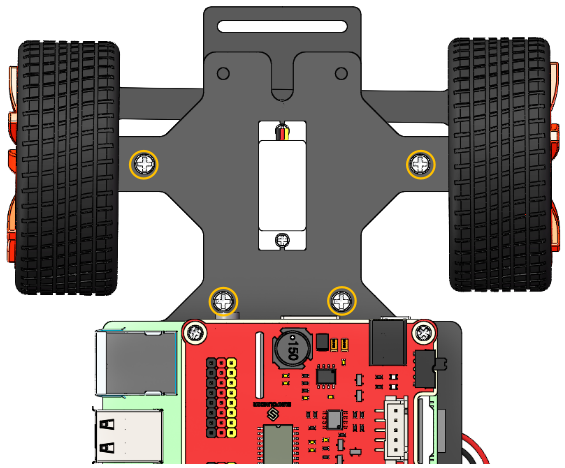
2つの M3x10ネジ と M3ナット を使用して、パン&チルトプレート を車に取り付ける。
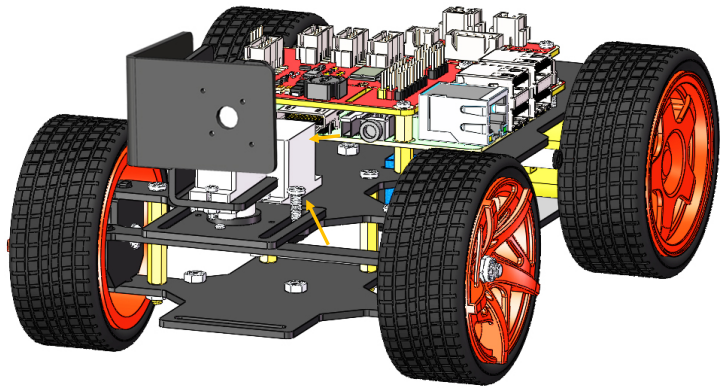
カメラを組み立てる¶
カメラを取り出し、カメラマウントに鋏む。USBケーブルをRaspberry PiのUSBポートに接続する。
これで、アセンブリ全体が完了した。おめでとう!今すぐ車の電源を切ることができる!バッテリーを充電することを忘れないでください。