車の組み立て¶
箱を開けてたくさんの部品を見るとワクワクしますか?あなたの忍耐を保ち、それを楽にしてください。次の手順の一部の詳細は注意深く観察する必要があることに注意してください。各ステップを終えた後、マニュアルの図に基づいて作業を再確認する必要があります。はじめましょう!
前輪¶
以下に示すように、M4x25ネジ を一つの ステアリングコネクタプレート 、3つの ベアリングシールド 、3つの 六角前輪固定プレート 、と一つの 前輪 を通して M4セルフロックナット に挿入する:
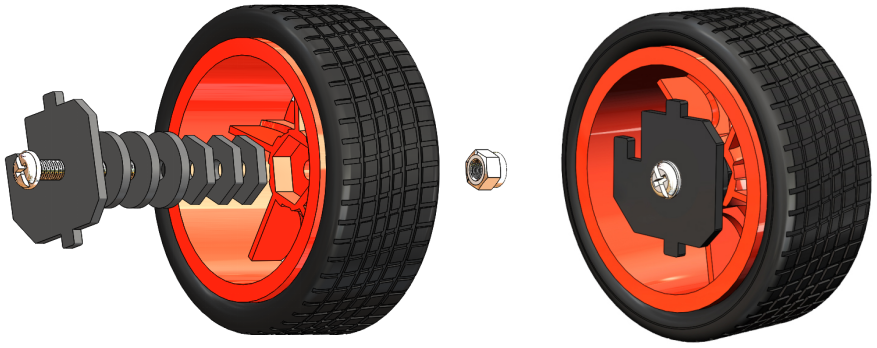
クロスソケットレンチを使用して M4セルフロックナット を固定してからドライバーを使用して M4x25ネジ を締める。

注釈
セルフロックナットはしっかりと締まっていることを確認してください。車輪とステアリングコネクタが動かなくなるまでネジを締め、次にネジを少し緩めて、ステアリングプレートだけが動くようにする。したがって、接続が緩すぎない場合、ホイールは柔軟に回転できる。
同じ方法で他の前輪を組み立てるが、車輪のステアリングコネクタプレートは前のものと対称であることを覚えておいてください。
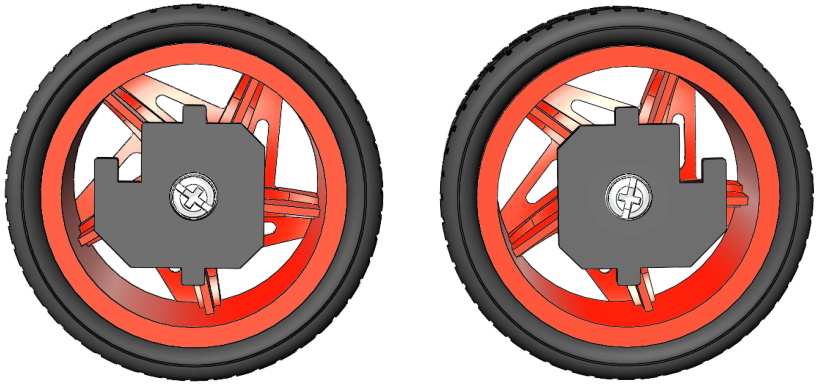
これで2つの前輪の組み立てが完了した。
パンとチルト¶
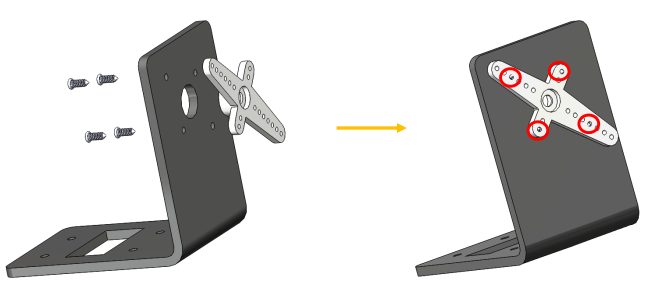
2 x アームロッカーアームを取出し、2M1.5 x 4 ネジを使って、パン-チルトベースプレートに取り付けます。(方向はに次のように)。
カメラマウントプレート にも同様の操作を行ってください。
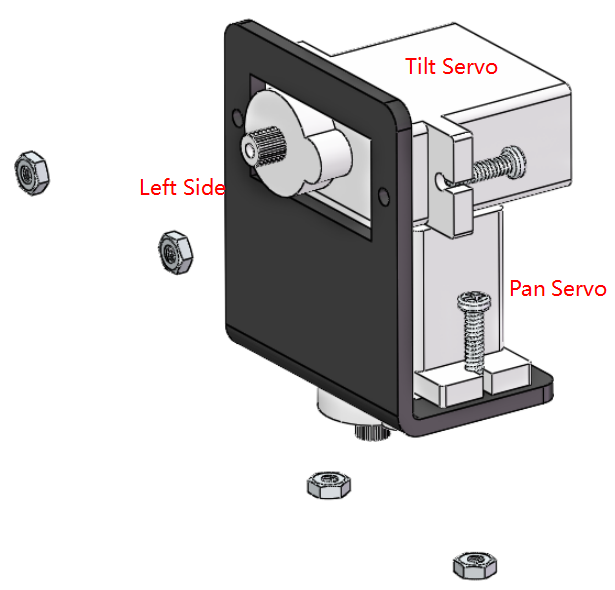
4つのM2x8ネジ と M2ナット を使用して、2つのサーボを パン&チルトプレート に取り付ける(2つのサーボシャフトは左側にある)。
ステアリングパーツ¶
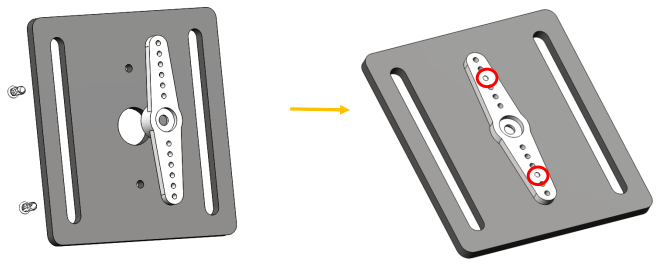
ステアリングリンケ ージと 1アームロッカーアーム を M1.5x4 セルフタッピング ネジで接続します。
注釈
ギアから最も遠いアームの 最初 の穴(下の 矢印 で示されている)に挿入します。
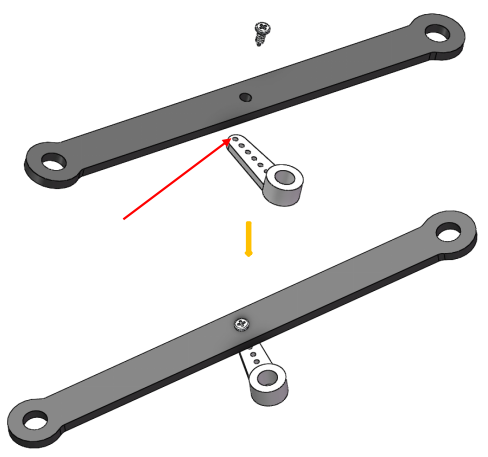
また、それらをしっかりと締めてから、ネジを少し緩め、ステアリングリンケージが柔軟に動くようにする。
上部プレート¶
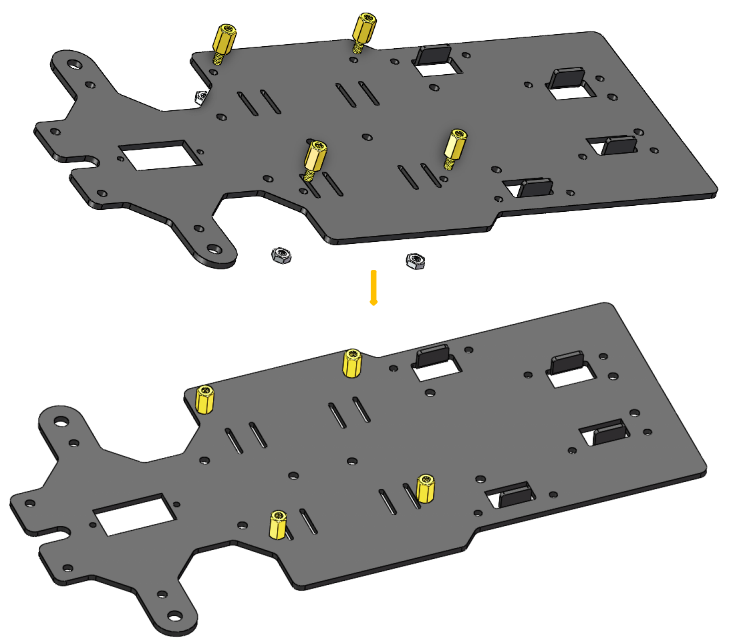
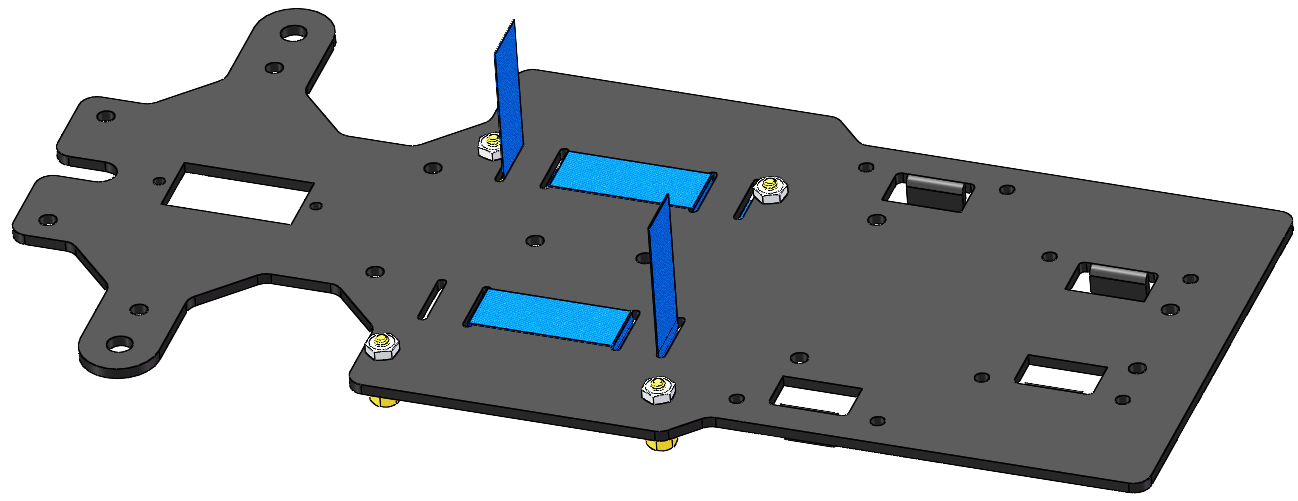
最初に M2.5x8銅製スタンドオフ と M2.5ナット を 上部プレート に取り付ける。突き出た支柱が上に向くように注意してください。
バッテリーホルダー¶
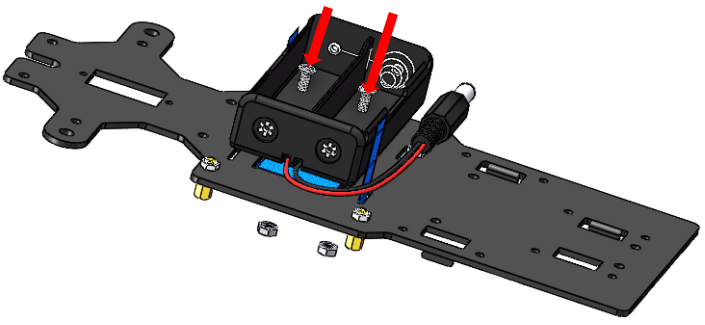
上部プレートを裏返しにする。リボン を半分にカットする。プレートの穴に通す。方向に注意して、バッテリーを後で簡単に取り外すことができるように、プレートの一方の端を長くしてください。
2本の M3x8皿ネジ と M3ナット でバッテリーホルダーを固定する。バッテリーホルダーの配線の方向に注意を払ってください。
後輪(ネジ)¶
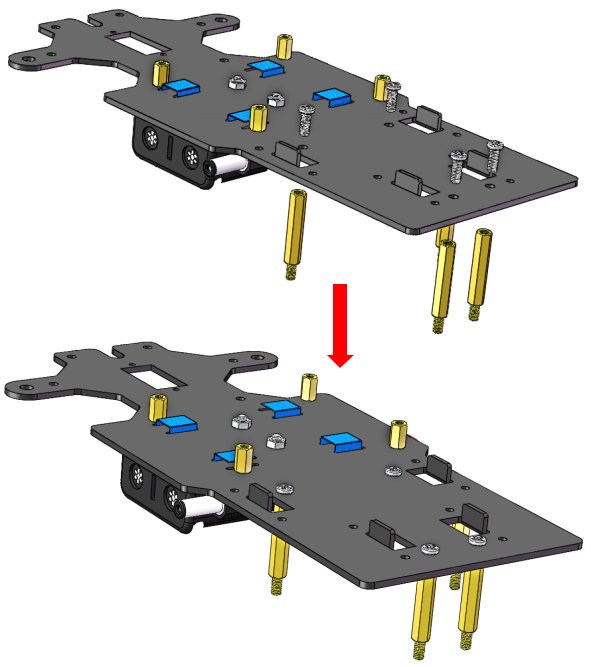
4本の M3x25銅製スタンドオフ を備えた4本の M3x8ネジ を差し込む。
PCB組み立て¶
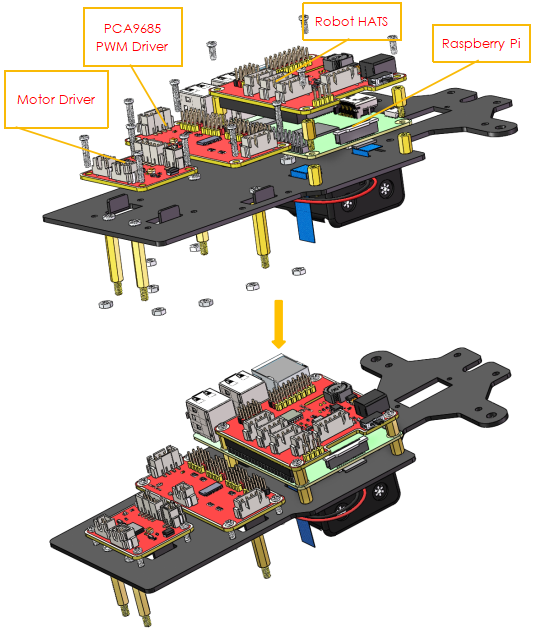
Raspberry Pi (TFカード差込済み)を8つの M2.5x8シングルパス銅製スタンドオフ で組み立てから ロボットHATS を差し込む。
4つの M2.5x6ねじ で ロボットHATS を固定する。
PCA9685 PWMドライバー と モータードライバ ーを8つの M2.5x12ネジ と M2.5ナット で 下部プレート に固定する:
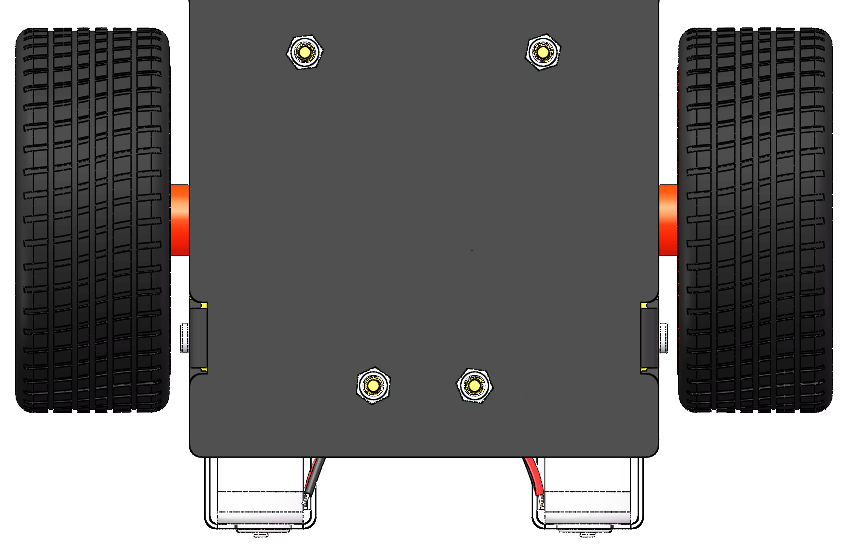
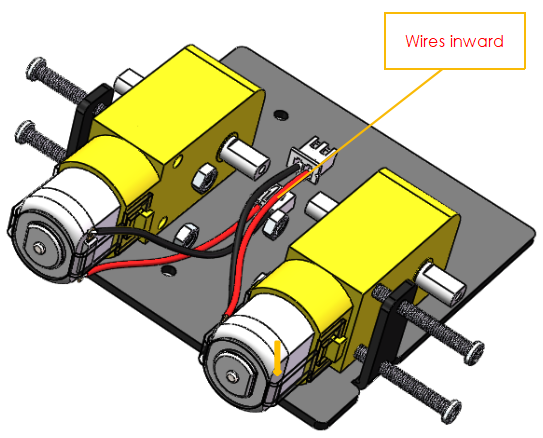
後輪の固定¶
4つの M3x25ネジ と M3ナット で2つのモーターを組み立てる。モーターを配線で内側に配置するように注意してください。こうすると、回路を接続することを便利にする。
4つのM3ナットで後輪を組み立てる。
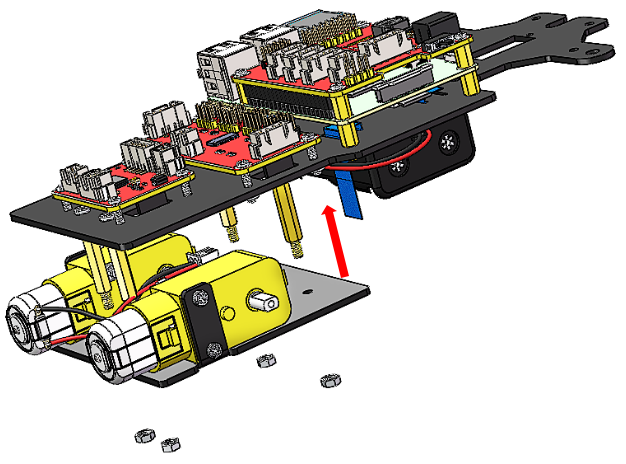
後輪 をモーターシャフトに合わせ、回転させてやさしく差し込む。