ボール_追跡装置¶
キーボードを使用して車の状態を制御するだけでなく、ボールトラッキングコードも作成した。
Install OpenCV
Before installing OpenCV, you need to install the dependencies first. Different operating systems require different dependent libraries. (If you don't know your operating system version, you can try to install both.)
If your operating system is RASPBERRY PI BUSTER, you need to install the following dependencies.
sudo apt-get install libatlas-base-dev libjasper-dev libqt4-test libwebp6 libtiff5 libopenexr23 libgstreamer1.0-0 libavcodec-dev libavformat-dev libswscale-dev libqtgui4 -y
If your operating system is RASPBERRY PI BULLSEYE, you need to install the following dependencies.
sudo apt-get install libatlas-base-dev libjasper-dev libwebp6 libtiff5 libopenexr25 libgstreamer1.0-0 libavcodec-dev libavformat-dev libswscale-dev -y
Next is to install OpenCV.
sudo pip3 install opencv-python==3.4.6.27
Run the Code
cd ~/SunFounder_PiCar-V/ball_track python3 ball_tracker.py
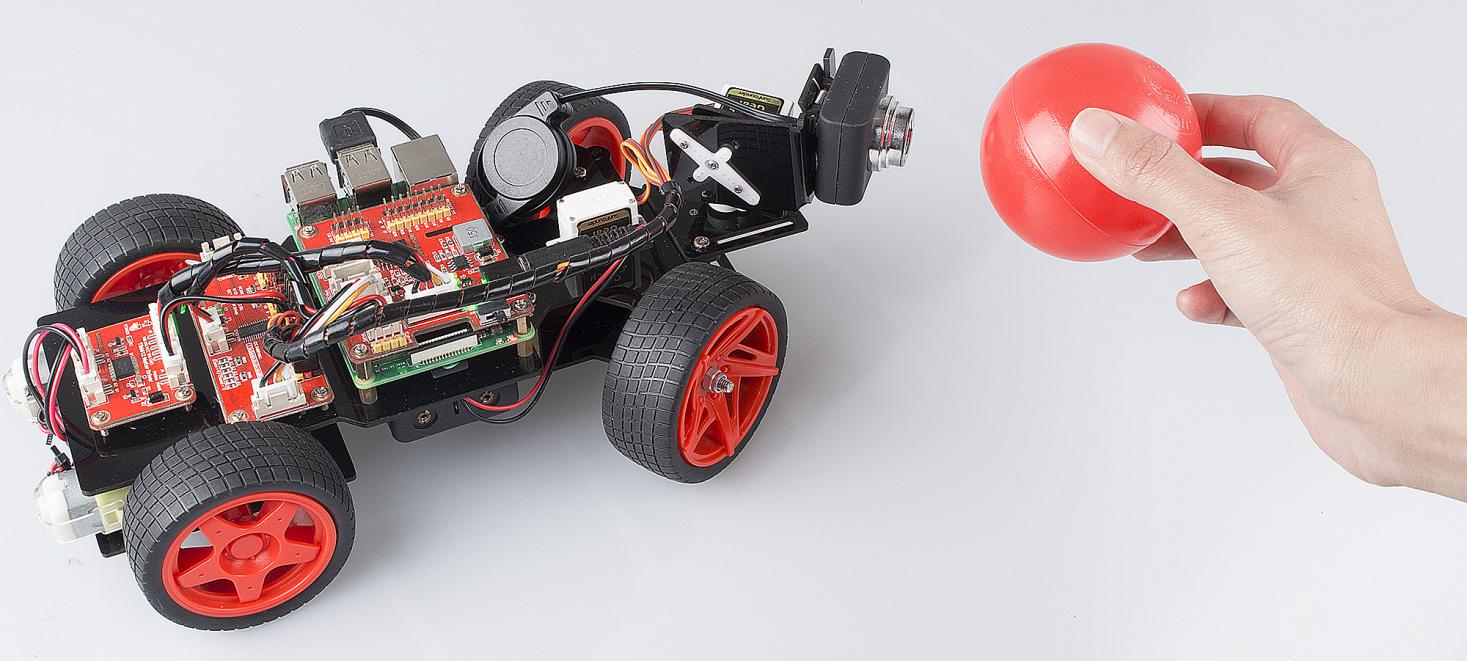
コードが実行されたら、赤いボール(少なくともカメラの直径よりも大きい)を見つけ、カメラの前の10〜50cmの範囲内に配置して、車があなたのボールを追跡するようにする。
車があなたのボールを捕まえたかどうかを知りたい場合は、以下の手順を実行してください:
ステップ1: Raspberry PiでVNCを有効にする。
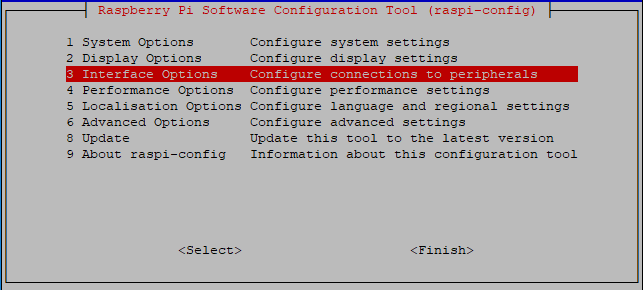
sudo raspi-config
3 Interfacing Options を選択する。Enter キーを押してください。
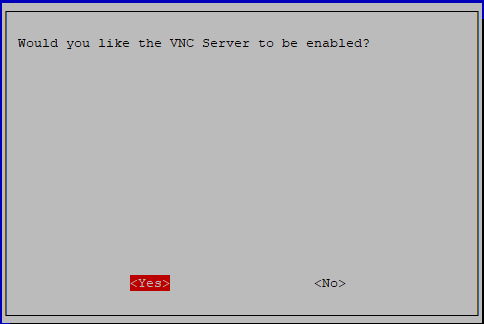
P3 VNC
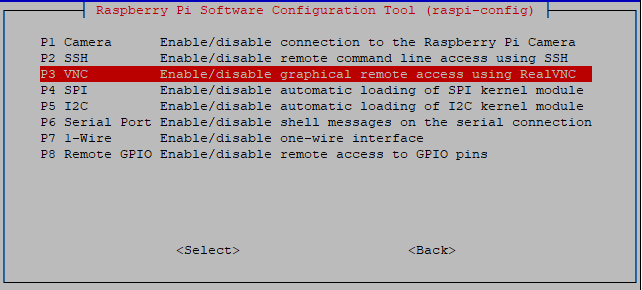
キーボードの左矢印キーを押して、はい を選択します。
最後に OK -> Finish を選択して、構成を終了する。
ステップ2: お使いのコンピューター用のVNCビューアーをダウンロードしてインストールする。
https://www.realvnc.com/en/connect/download/viewer/
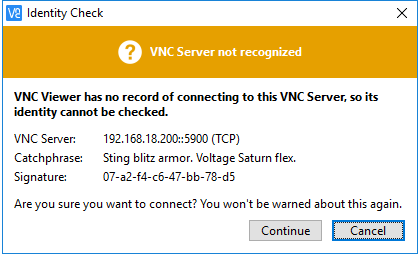
注釈
Windowsへの実装中に次のプロンプトが表示された場合は、Continue をクリックしてインストールを続行してください。
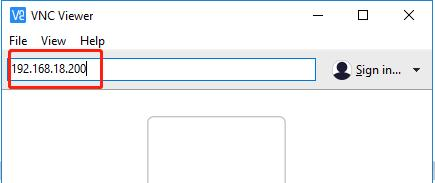
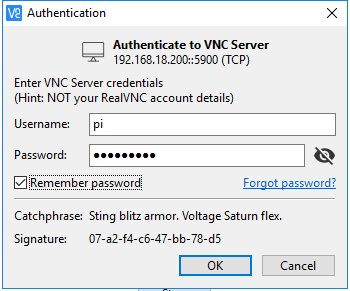
ステップ3: インストールしたVNCビューアーを開き、Raspberry PiのIPアドレスを入力して、Enterボタンを押す。
ステップ4: このページでRaspberry Piのユーザー名とパスワードを入力し、デフォルトでは、別々はpiとraspberryである。次にOKをクリックする。
VNC Viewerでログインすると、画面が真っ暗になる場合があります。画面が正常に表示されている場合は、ステップ5に進みます。
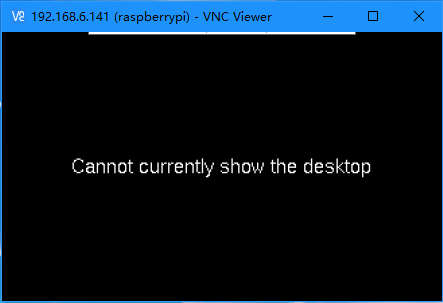
RaspberryPiの解像度を最高に変更します。
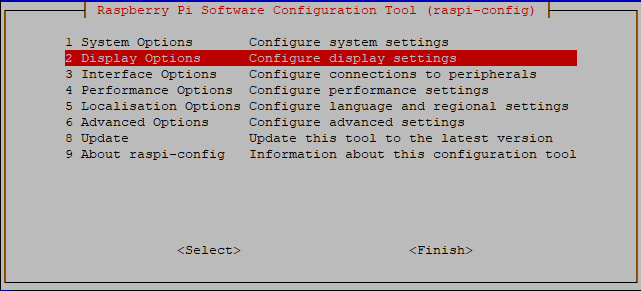
sudo raspi-config
選択 2 Display Options。
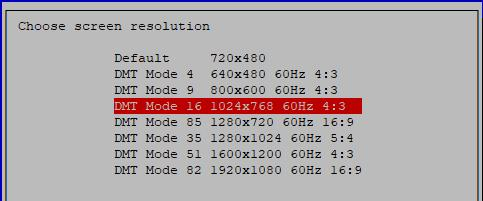
選択 D1 Resolution。
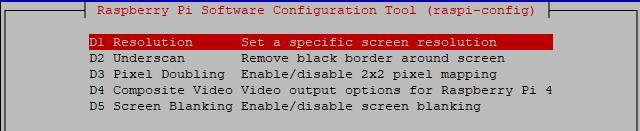
デフォルトをモード 16 のような高解像度に変更します。次に OK をクリックする。
Raspberry Piを再起動し、再度ログインすると、機能します。
sudo reboot
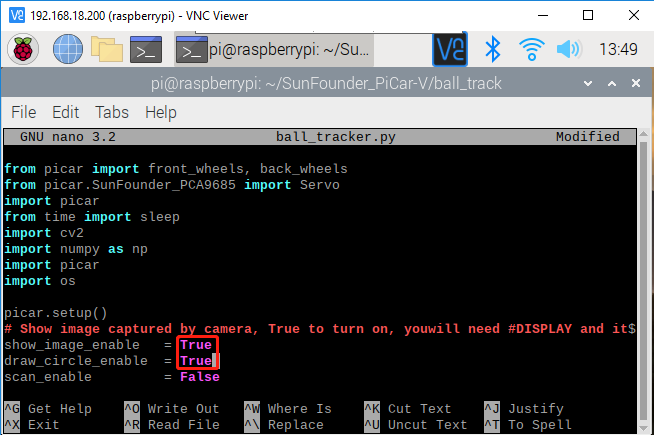
ステップ5: 次に、Raspberry Piデスクトップに入り、ターミナルをクリックし、次のコマンドを入力して、コードball_tracker.pyを開く。
cd ~/SunFounder_PiCar-V/ball_track
sudo nano ball_tracker.py
次に、コードを次のように修正する:
Show_image_enable = True
Draw_circle_enble = True
Ctrl+XとYを押して変更を保存する。
注釈
この手順を完了したら、VNC経由でRaspberry Piにログインするか、またはモニターを使用してください。そうでない場合、次の警告が出される:

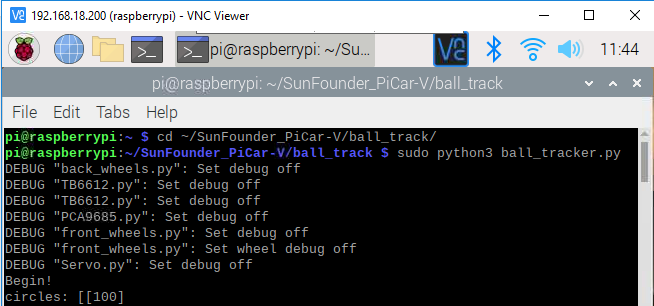
ステップ6: ball_tracker.pyを実行する。
python3 ball_tracker.py
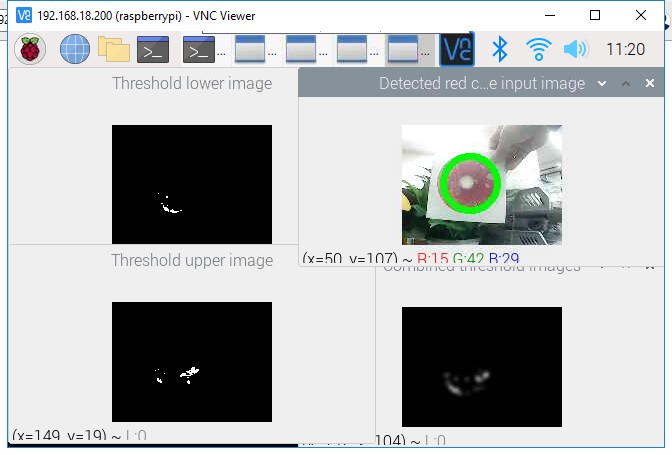
ステップ7: コードball_tracker.pyを実行すると、これらの4つの画像が表示される。カメラの前に赤いボールを置くと、車が赤いボールを捕まえたことを示す緑の円が表示される。