サーボ構成¶
また、このキットで使用されるサーボはソフトウェアによって調整され、他のサーボほど物理的な固定点がないため、ここではソフトウェアを介してサーボを構成する。最初に、構成の前にソフトウェアの実装を完了してください。
注釈
本章では、バッテリーを取り付けて電源スイッチをONにスライドすることを忘れないでください。
ソースコードを取得する¶
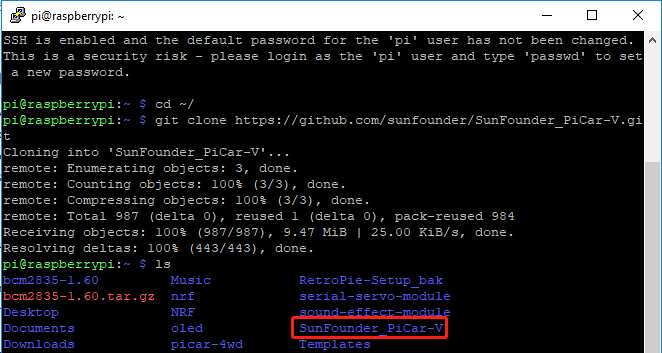
ソースコードはGithubリポジトリにある。git clone でソースコードをダウンロードする:
cd ~/
git clone https://github.com/sunfounder/SunFounder_PiCar-V -b V3.0
注釈
入力時に十分に注意してください。ユーザー名とパスワードの入力を求められた場合は、入力を間違えている可能性がある。それは発生した場合、Ctrl+Cを押して終了し、再試行してください。
ls コマンドで確認すると、コードディレクトリ SunFounder_PiCar-V が表示される:
コードディレクトリに入る¶
cd ~/SunFounder_PiCar-V
コードディレクトリに入ると、インストールスクリプトが表示される:

スクリプトを介して環境をインストールする¶
install_dependenciesスクリプトを使用して、必要なすべてのソフトウェアと構成を実行することはできる。代わりに一歩一歩に実行する場合は、「付録1:サーバーインストールスクリプトの機能」の手順に従ってください。
sudo ./install_dependencies
注釈
インストールスクリプトは、必要な部品をインストールし、動作環境用に構成する。インストール中にRaspberryがインターネットに接続されていることを確認してください。接続しない場合は、失敗する恐れがある。
インストールを完了した後、Raspberry Piは再起動すると示す。再起動するにはyesと入力してください。
サーボを90度に設定する¶
再起動後、picarツールを実行する:
cd ~/SunFounder_PiCar-V
picar servo-install
注釈
「OSError:[Errno 121] Remote I/O error」エラーメッセージが表示された場合は、raspi-configを開く:
sudo raspi-config
次に、3 Interfacing Options → <P5 I2C> → <YES> → <OK>を選択してI2Cサービスを有効にします。 キーボードの上、下、左、右のキーを使って選択できます、最後は<Enter>キーを押して確認します。
コードの実行後、ロッカーアームをサーボに差し込む。ロッカーアームが時計回りと反時計回りに回転し、特定の位置で停止する。サーボが良い状態にあると示す。以下の条件のいずれかがサーボに発生した場合、サーボは不良である:
雑音あり、熱い。
サーボラインを抜いてロッカーアームを回すと「カ」「カ」「カ」のように聞こえるか、またはギアの駆動音が鳴らさない。
ゆっくりで継続的に回してください。
上記の状況のいずれかが発生した場合は、 service@sunfounder.com <mailto:support@sunfounder.com>`__に送信してください。新品に交換してあげる。使用または組み立ての過程で破損した場合は、公式ウェブサイト`www.sunfounder.com にて購入してください。