Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Memory Function¶
Piarm provides a function of recording actions, which can be used to record the actions that PiArm has done.
In this project, we will use the Dual Joystick Module to control the movement of the Arm of PiArm in Coordinate Control mode, and record the motion trajectory of the Arm through the joystick buttons so that PiArm can move repeatedly along the recorded trajectory.
Programming¶
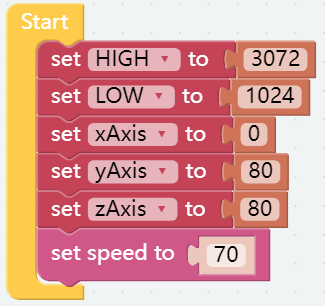
Step 1
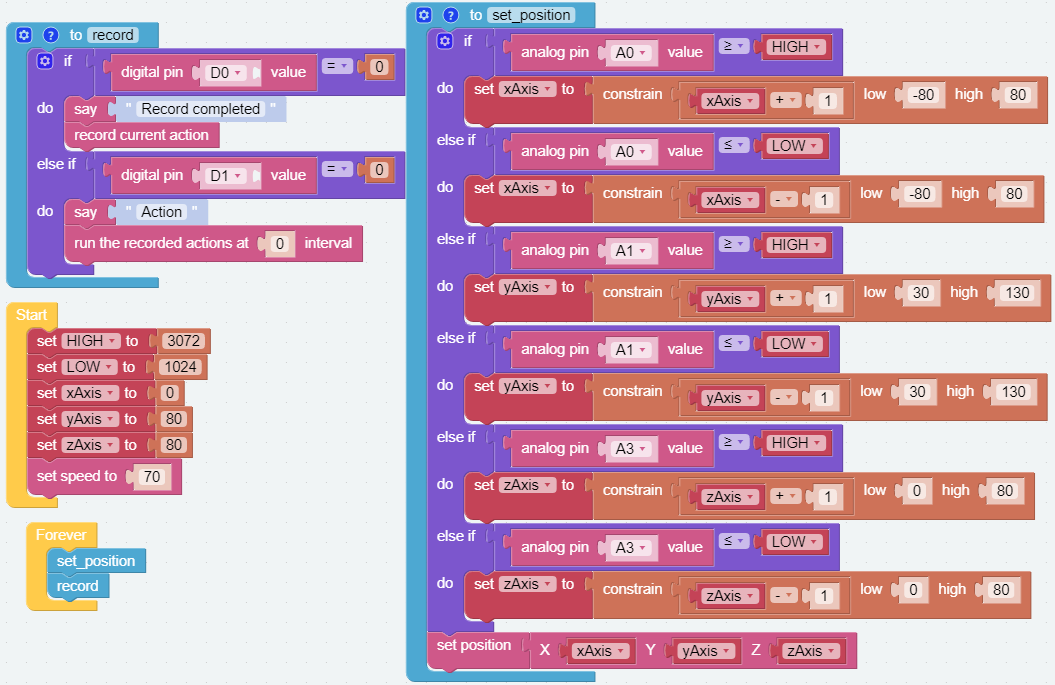
Create five variables (HIGH, LOW, xAxis, yAxis and zAxis) and set their initial values.
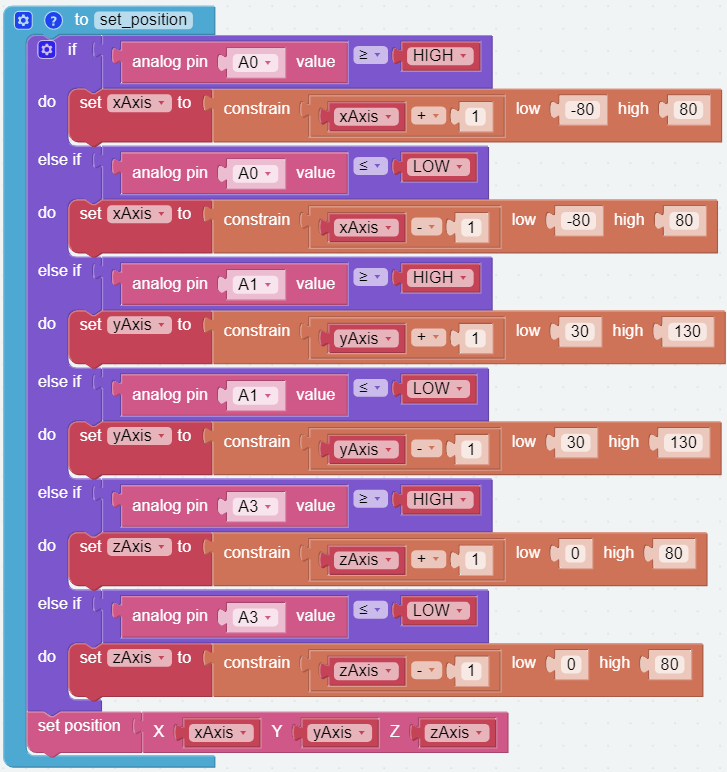
Step 2
Create a function named [set_position] to make the Dual Joystick Module move the PiArm in Coordinate Mode.
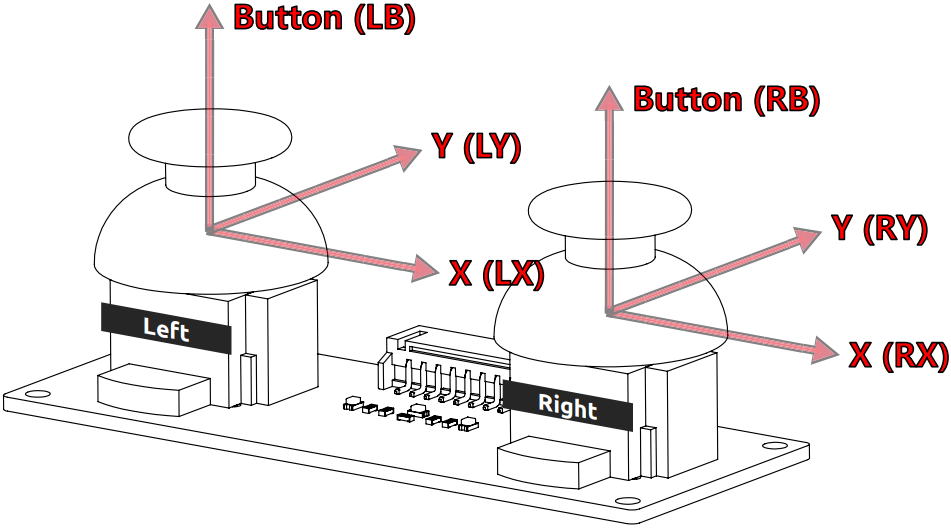
If the left joystick is toggled to the right, the Arm will turn right.
If the left joystick is toggled to the left, the Arm will turn left.
If the left joystick is toggled forward, the Arm will extend forward.
If the left joystick is toggled backward, the Arm will retract backward.
If the right joystick is toggled forward, the Arm will raise up.
If the right joystick is toggled backward, the Arm will lower down.
Note
About X, Y, Z coordinate directions, please refer to: Coordinate Mode.
For the connection and direction of the dual joystick, refer to Dual Joystick Module.
[constrain () low () high ()]: From Math category for setting the variation of a constant to a certain range.
[if else]: Conditional judgment block, you can create multiple conditional judgments by clicking the set icon and dragging [else] or [else if] to the right below the [if].
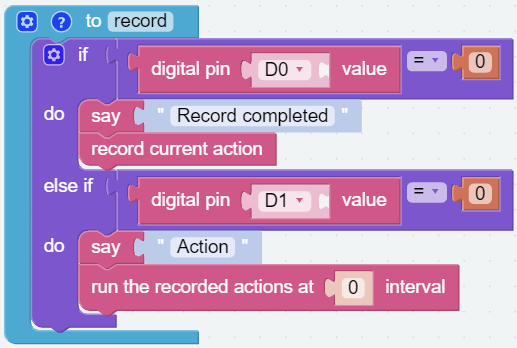
Step 3
A new function, [record], is created to record the current actions and to allow PiArm to reproduce them.
The left and right buttons of the Dual Joystick Module are connected to D0 (Left Button), D1 (Right Buttbon) respectively.
The buttons will output low level (0) when pressed and output high level (1) when released.
When the button of the left joystick is pressed, the action of PiArm will be recorded at this time, and there will be a voice prompt to indicate the completion of recording.
When the button of the right joystick is pressed, PiArm will reproduce these recorded actions.
Note
The [if else], [and] and [=] blocks are all from the Logic category.
[run the recorded actions at () internal]: This block is used to set the time interval for each set of recorded actions, if it is 0 it will reproduce each set of actions continuously.
Step 4
Put the [set_position] and [record] functions into the [Forever] block to execute them sequentially, and finally click the Download button to run the code.
Now you can use the joystick to control PiArm, press the button of the left joystick to record the desired actions, and after recording a few groups, press the button of the right joystick to make PiArm reproduce these actions.
Note
You can also find the code with the same name on the Examples page of Ezblock Studio and click Run or Edit directly to see the results.
What’s More¶
You can also add separate EoAT control code to this project, so that you can control the Arm and EoAT of the PiArm at the same time.
If you want to control Shovel Bucket, please refer to Shovel Bucket - Joystick Control to write the code.
If you want to control Hanging Clip, please refer to Hanging Clip - Joystick Control to write the code.
If you want to control Electromagnet, please refer to Electromagnet - Joystick Control to write the code.