Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Quick Guide on Ezblock¶
There are 2 parts here:
Servo Adjust allows you to keep all the servos at 0 degrees to complete a proper and safe assembly (otherwise you will probably damage the servos).
Install and Configure EzBlock Studio will guide you to download Ezblock Studio to play with your robot.
Servo Adjust¶
When assembling to the part with the servo, you need to keep the servo at 0° and secure it with the servo screw. Please follow the tutorial below to do this.
Firstly, Install EzBlock OS onto a Micro SD card, once the installation is complete, insert it into the Raspberry Pi.
To ensure that the servo has been properly set to 0°, first insert the rocker arm into the servo shaft and then gently rotate the rocker arm to a different angle.

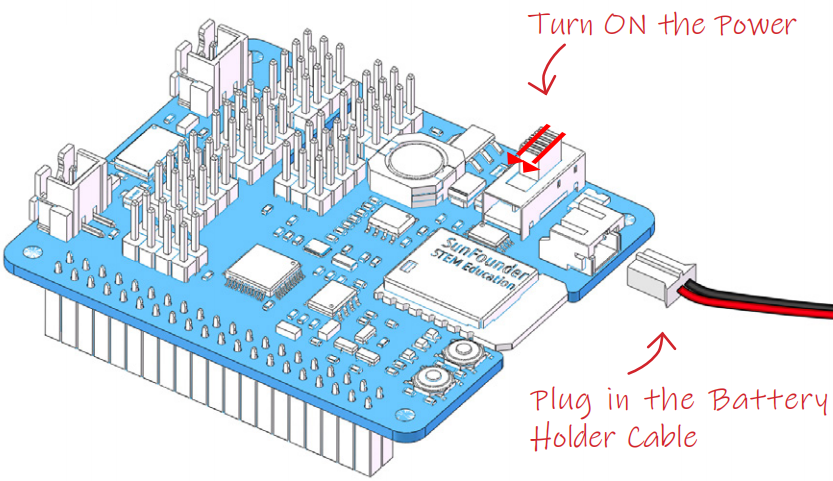
Follow the instructions on the assembly foldout, insert the battery holder cable and turn the power switch to the ON. Wait for 1-2 minutes, there will be a sound to indicate that the Raspberry Pi boots successfully.
Next, plug the servo cable into the P11 port as follows.
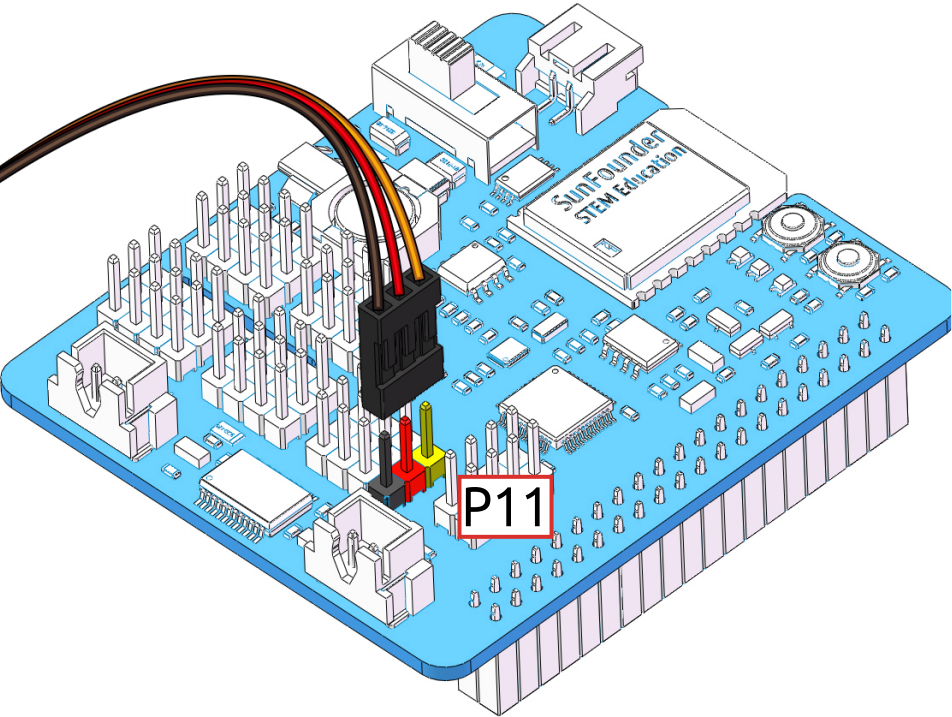
At this point you will see the servo arm rotate to a specific position (0°). If the servo arm does not return to 0°, press the RST button to restart the Robot HAT.
Now you can continue the installation as instructed on the assembly foldout.
Note
Do not unplug this servo cable before fastening this servo with the servo screw, you can unplug it after fastening.
Do not turn the servo while it is powered on to avoid damage; if the servo shaft is inserted at the wrong angle, pull out the servo and reinsert it.
Before assembling each servo, you need to plug the servo cable into P11 and turn on the power to set its angle to 0°.
This zeroing function will be disabled if you download a program to the robot later with the EzBlock APP.
Install and Configure EzBlock Studio¶
As soon as the robot is assembled, you will need to carry out some basic operations.
Install EzBlock Studio: Download and install EzBlock Studio on your device or use the web-based version.
Connect the Product and EzBlock: Configure Wi-Fi, Bluetooth and calibrate before use.
Open and Run Examples: View or run the related example directly.