Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
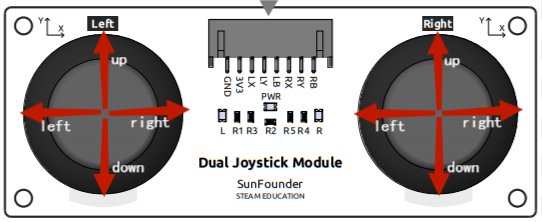
Dual Joystick Module¶
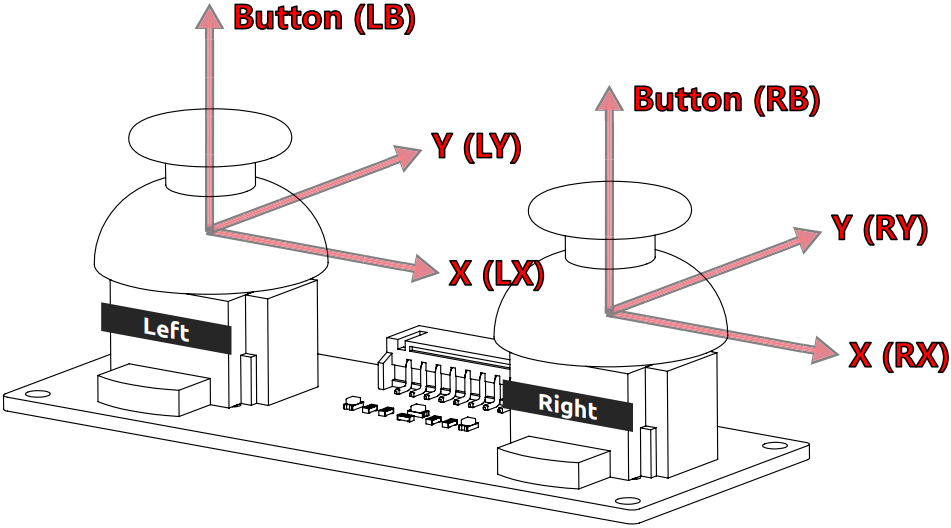
Dual joystick module, as the name implies, consists of two joysticks, each of which can output electrical signals in X, Y and Z directions.
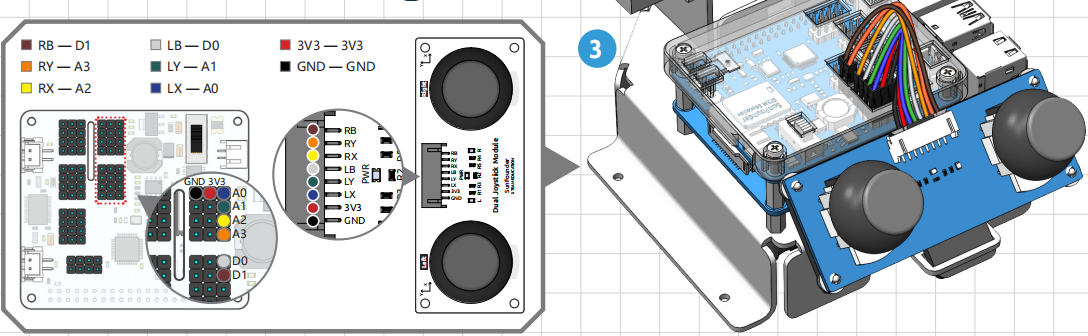
Before you can use the dual joystick module, you need to connect its 8 wires to the corresponding pins of the Robot HAT as shown in the picture below.
The joystick reads in a plane coordinate system from 0 to 4095, with the origin (0,0) in the lower left corner.
As an example, the coordinate value when the joystick is not pushed is (2048,2048). If the joystick is pushed to the left, the coordinates are (0,2048). When the joystick is pushed down, the coordinates are (2048,0), as shown below.
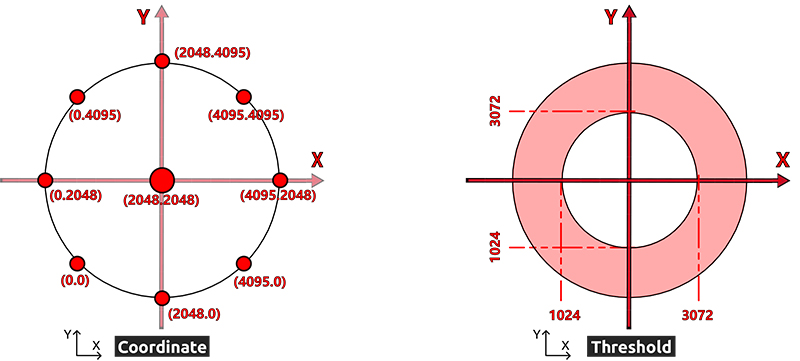
However, electrical signals tend to fluctuate and it is difficult to get an absolutely stable reading, so we usually set a value interval to determine where the joystick is currently located.
The recommended boundary values are set to 3072 and 1024. when the joystick reading is greater than 3072, the joystick is considered to be pushing up (or right); if the reading is less than 1024, the joystick is considered to be pushing down (or left).
Note
In the Python library, these values have been processed into directional indications as follows.
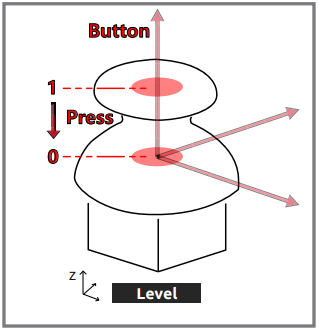
The Z-axis button outputs a low level (0) when pressed and a high level (1) when released.