21. Controllare PiCrawler con OpenClaw
Cos’è OpenClaw?
Pensalo come una versione migliorata di ChatGPT. Mentre i chatbot tradizionali possono solo parlare (generare testo), OpenClaw può agire. Comprende le tue istruzioni in linguaggio naturale e può effettivamente eseguire operazioni sul tuo computer, come eseguire comandi, gestire file e chiamare vari strumenti.
Ecco alcuni fantastici scenari applicativi:
Assistente personale tuttofare: Lascia che gestisca il tuo calendario, imposti promemoria e tenga traccia delle attività. Devi solo dirglielo in un’app di chat (come Telegram, WhatsApp), e lui ricorderà ed eseguirà.
«Collante» di automazione: Può fungere da legante per i tuoi vari servizi. Ad esempio, puoi fargli monitorare un sito web per variazioni di prezzo. Una volta rilevato un calo di prezzo, può attivare automaticamente un flusso di lavoro di automazione n8n per inviarti una notifica email.
Assistente di sviluppo dedicato: Fagli gestire server, eseguire script e controllare i log. Puoi semplicemente dire: «Controlla il carico di sistema per me», e lui può connettersi via SSH al tuo server, eseguire il comando e restituire i risultati.
«Compagno di giochi» hardware: Questo è un caso d’uso molto interessante. Puoi far controllare a OpenClaw l’hardware collegato a un Raspberry Pi. Ad esempio, uno sviluppatore l’ha usato per controllare un aspirapolvere robot con un braccio meccanico, o persino per analizzare i dati di un simulatore di corse e visualizzarli su uno schermo LED. Il team ufficiale di Raspberry Pi l’ha persino usato per costruire un photobooth automatico per un matrimonio, solo conversando, senza scrivere una sola riga di codice!
Importante
Il Raspberry Pi Zero 2W ha solo 512 MB di RAM, mentre OpenClaw richiede un minimo di 1 GB. Pertanto, non può funzionare correttamente. Si consiglia un Raspberry Pi 4/5 o superiore.
Avvio rapido di OpenClaw
Se desideri sperimentare la potenza di OpenClaw il più rapidamente possibile, usa questo metodo. Installerà automaticamente OpenClaw e avvierà una procedura guidata di configurazione interattiva.
Apri il terminale sul tuo Raspberry Pi ed esegui direttamente il seguente comando. Questo comando scarica lo script di installazione dal sito web ufficiale e lo esegue:
curl -fsSL https://openclaw.ai/install.sh | bash
Nota
Poiché le nuove versioni vengono aggiornate rapidamente, è normale che i tuoi passaggi di installazione differiscano leggermente.
Lo script scaricherà e installerà automaticamente OpenClaw.
Vedrai quindi una richiesta di sicurezza che chiede se ti fidi di OpenClaw. Una volta sicuro che sia sicuro e affidabile, usa i tasti freccia per navigare su «Yes» e premi Invio.
Seleziona Quick Start, quindi premi Invio.

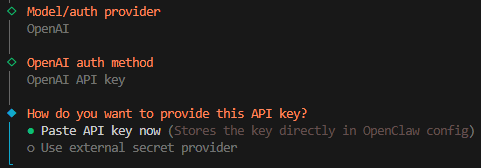
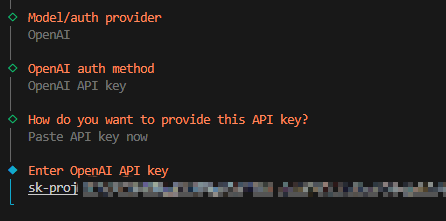
Seleziona il tuo modello, quindi premi Invio. Qui usiamo OpenAI come esempio.
Seleziona OpenAI API Key.
Incolla ora la chiave API.
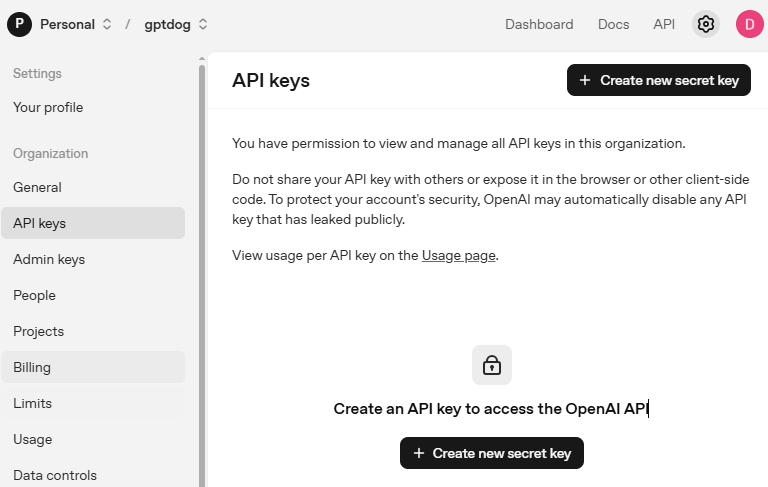
Vai su Piattaforma OpenAI e accedi. Nella pagina API keys, clicca su Create new secret key.
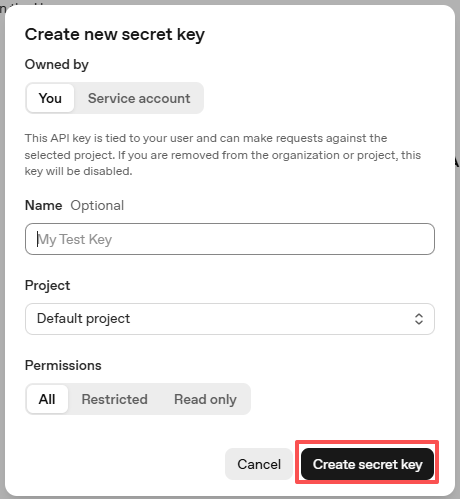
Compila i dettagli (Owner, Name, Project e permessi se necessario), poi clicca su Create secret key.
Una volta creata la chiave, copiala immediatamente — non potrai più visualizzarla. Se la perdi, dovrai generarne una nuova.
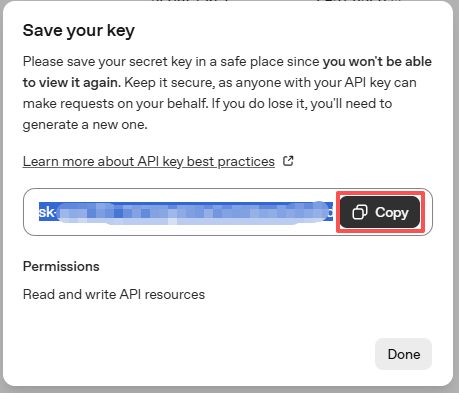
Incolla la chiave nella configurazione di OpenClaw.
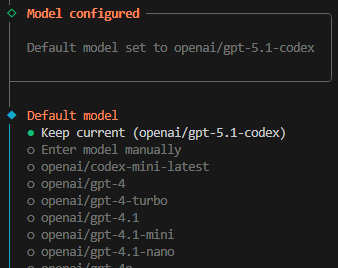
Seleziona il modello che desideri utilizzare. In questo esempio, useremo Keep current.
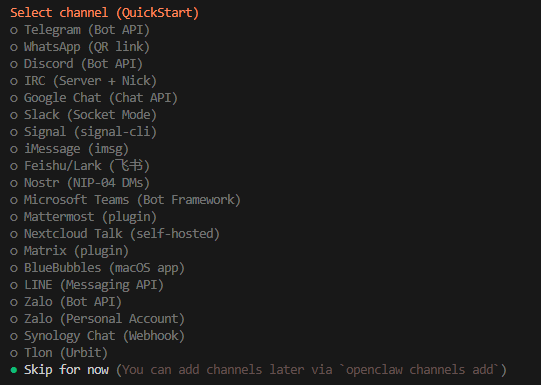
Successivamente c’è la selezione dei canali. I canali si riferiscono ai servizi di comunicazione supportati da OpenClaw, come Telegram, WhatsApp, Discord e altri. Usa il tasto freccia giù per selezionare l’opzione «Skip for now», quindi premi Invio.
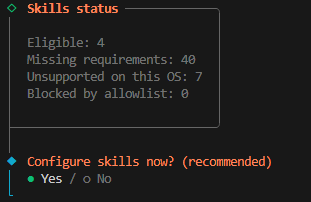
Successivamente, ti verrà chiesto di configurare subito le competenze. Seleziona «Yes» e premi Invio.
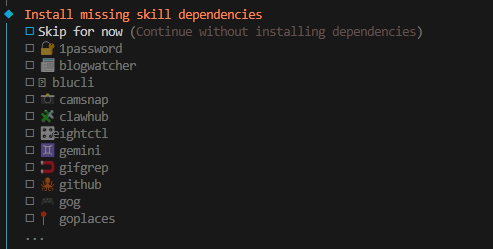
Installa le competenze di cui hai bisogno. Nell’esempio seguente, selezioniamo l’opzione «Skip for now» (premi la barra spaziatrice per selezionare), quindi premi Invio.
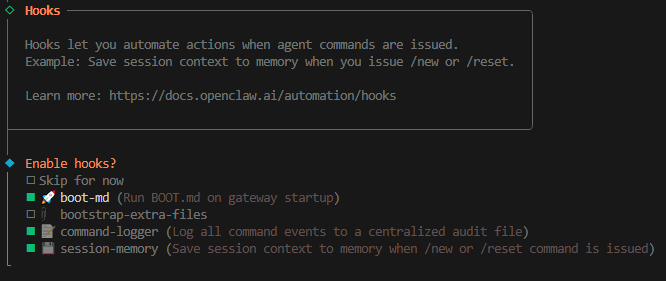
Successivamente ci sono gli Hooks; selezioneremo «command-logger» e «session-memory».
L’installazione è ora completa. Puoi avviare OpenClaw selezionando «Hatch in TUI» e premendo Invio.
Nota
Puoi avviare OpenClaw inserendo il seguente comando:
openclaw tui
E puoi premere Ctrl+C due volte per uscire dall’interfaccia TUI.
Far funzionare PiCrawler con OpenClaw
Cos’è PiCrawler Skill?
PiCrawler Skill è un’estensione per OpenClaw che ti permette di controllare il tuo robot ragno SunFounder PiCrawler tramite linguaggio naturale. Invece di scrivere script Python o ricordare valori di coordinate, puoi semplicemente dire a OpenClaw cosa vuoi che PiCrawler faccia — come «alzati», «cammina tre passi in avanti» o «controlla se c’è un ostacolo davanti» — e OpenClaw eseguirà automaticamente il codice Python appropriato.
Ecco alcune cose che puoi fare con PiCrawler Skill:
Movimenti di base: Camminare in avanti, indietro, girare a sinistra/destra, virate a piccolo angolo
Posizioni: Alzarsi, sedersi
Azioni espressive: Salutare con una zampa anteriore, ballare, fare flessioni, guardare in diverse direzioni
Sensori: Leggere il sensore di distanza a ultrasuoni per rilevare ostacoli
Suono: Riprodurre effetti sonori e musica attraverso l’altoparlante del robot
Visione con fotocamera: Scattare foto, rilevare volti, tracciare colori, riconoscere codici QR e gesti
Prerequisiti
Prima di poter utilizzare PiCrawler Skill con OpenClaw, assicurati di avere:
PiCrawler correttamente assemblato e collegato al tuo Raspberry Pi
OpenClaw installato e in esecuzione
Le seguenti librerie Python installate:
picrawlerrobot_hatvilib
Puoi verificare l’installazione eseguendo:
python3 -c "import picrawler"
Se questo comando viene eseguito senza errori, sei pronto per procedere.
Installare PiCrawler Skill
Segui questi passaggi per installare PiCrawler Skill per OpenClaw:
Copia i file del PiCrawler Skill nella directory delle competenze di OpenClaw:
cp -r ~/picrawler/picrawler-control ~/.openclaw/workspace/skills/
Verifica l’installazione controllando i file della competenza:
ls ~/.openclaw/workspace/skills/picrawler-control/Dovresti vedere
SKILL.md,install.sh,scripts/ereferences/nell’output.
Il file SKILL.md della competenza contiene tutte le istruzioni di cui
OpenClaw ha bisogno — regole di sicurezza, modelli di codice per ogni
capacità e una mappatura dalle richieste in linguaggio naturale al codice
Python. OpenClaw legge questo file e lo usa per decidere quale codice
eseguire sul tuo PiCrawler.
Testare PiCrawler Skill dalla CLI
Prima di utilizzare la competenza con OpenClaw, potresti voler testare le funzionalità di base direttamente dal terminale usando lo strumento CLI incluso.
Controllare la distanza ultrasonica:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py sensor distance
Far sedere PiCrawler:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py pose sit --speed 40
Far alzare PiCrawler:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py pose stand --speed 40
Camminare in avanti:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py move forward --steps 2 --speed 60
Girare a sinistra:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py move "turn left" --steps 1 --speed 60
Riprodurre un effetto sonoro:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py sound play /home/pi/picrawler/examples/sounds/talk1.wav --volume 80
Eseguire la calibrazione dei servi:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py calibrate
Usare PiCrawler Skill in OpenClaw
Una volta verificato che PiCrawler Skill funziona dalla riga di comando, puoi iniziare a usarlo all’interno di OpenClaw.
Avvia OpenClaw TUI:
openclaw tuiInvia comandi in linguaggio naturale per controllare PiCrawler. Ecco alcuni esempi:
«Stand up»
«Sit down»
«Walk forward three steps»
«Turn left»
«Do a dance»
«Do some push-ups»
«Wave your front leg»
«Look to the left»
«Check if there’s something ahead»
«Take a photo»
«Detect faces / look at me»
«Find the color red»
OpenClaw tradurrà automaticamente la tua richiesta nel codice Python appropriato e lo eseguirà su PiCrawler. Per i comandi di movimento, la competenza assicura sempre che il robot si alzi prima e si sieda dopo aver completato l’azione.
Azioni e comandi disponibili
Ecco l’elenco completo delle capacità supportate da PiCrawler Skill:
Movimenti (pc.py move)
Azione |
Descrizione |
|---|---|
|
Camminare in avanti |
|
Camminare all’indietro |
|
Ruotare a sinistra sul posto |
|
Ruotare a destra sul posto |
|
Virata a piccolo angolo a sinistra |
|
Virata a piccolo angolo a destra |
Posizioni (pc.py pose)
Posizione |
Descrizione |
|---|---|
|
Alzarsi dalla posizione seduta |
|
Sedersi dalla posizione in piedi |
Azioni aggiuntive (via linguaggio naturale / exec)
Azione |
Descrizione |
|---|---|
|
Eseguire un movimento di danza |
|
Fare flessioni |
|
Salutare con una zampa anteriore |
|
Girare il corpo per guardare a sinistra |
|
Girare il corpo per guardare a destra |
|
Inclinare il corpo per guardare in alto |
|
Inclinare il corpo per guardare in basso |
Sensori
Comando |
Descrizione |
|---|---|
|
Leggere il sensore di distanza a ultrasuoni (restituisce cm) |
Suono (pc.py sound)
Comando |
Descrizione |
|---|---|
|
Riprodurre un file di effetto sonoro |
|
Riprodurre musica di sottofondo |
|
Impostare il volume dell’altoparlante |
|
Fermare la riproduzione |
Fotocamera e visione (via linguaggio naturale / exec)
Capacità |
Descrizione |
|---|---|
Scattare foto |
Catturare e salvare una foto in |
Rilevamento volti |
Rilevare volti umani e segnalare la posizione |
Rilevamento colore |
Localizzare oggetti per colore (rosso, blu, verde, ecc.) |
Riconoscimento gesti |
Riconoscere gesti carta/sasso/forbice |
Rilevamento segnali stradali |
Riconoscere segnali di stop/sinistra/destra/avanti |
Scansione codici QR |
Leggere dati e posizione dei codici QR |
Risoluzione dei problemi
Problemi di OpenClaw
D: Durante l’installazione, ricevo l’errore Error: systemctl is-enabled unavailable: Command failed: systemctl --user is-enabled openclaw-gateway.service. Cosa devo fare?
Puoi ignorarlo per ora, ma potresti incontrare problemi nei passaggi successivi. Consultali uno per uno in quel momento.
D: Quando eseguo openclaw tui, ricevo l’errore -bash: openclaw: command not found. Cosa devo fare?
Esegui il seguente comando:
echo 'export PATH="$HOME/.npm-global/bin:$PATH"' >> ~/.bashrc source ~/.bashrcOra dovresti essere in grado di avviare l’interfaccia TUI con
openclaw tui.
D: In openclaw tui, incontro not connected to gateway — message not sent o il messaggio gateway disconnected: closed.
Questo perché il tuo servizio OpenClaw Gateway non è avviato. Apri un altro terminale ed esegui il seguente comando per avviare l’OpenClaw Gateway:
openclaw gatewayQuindi riavvia
openclaw tuie potrai usarlo direttamente.
D: Voglio impostare il servizio OpenClaw Gateway per l’esecuzione in background / avvio automatico all’accensione. Come faccio?
Normalmente, il tuo servizio OpenClaw Gateway dovrebbe avviarsi automaticamente all’accensione. In caso contrario, puoi avviarlo manualmente con il seguente comando.
Crea la directory
~/.config/systemd/user:mkdir -p ~/.config/systemd/user
Crea il file
openclaw-gateway.service:cat > ~/.config/systemd/user/openclaw-gateway.service << EOF [Unit] Description=OpenClaw Gateway After=network.target [Service] Type=simple ExecStart=$HOME/.npm-global/bin/openclaw gateway run Restart=on-failure RestartSec=10 Environment="PATH=$HOME/.npm-global/bin:/usr/local/bin:/usr/bin:/bin:/usr/sbin" Environment="NODE_ENV=production" [Install] WantedBy=default.target EOF
Quindi ricarica la configurazione di systemd:
systemctl --user daemon-reload
Avvia il servizio:
systemctl --user start openclaw-gatewayA questo punto, riavvia
openclaw tuie potrai usarlo direttamente.
Attivalo per l’avvio automatico:
systemctl --user enable openclaw-gateway
D: Il mio OpenClaw non può operare sul sistema, cosa devo fare?
Un OpenClaw appena installato potrebbe non avere il permesso di operare sul tuo sistema Raspberry Pi per impostazione predefinita; può solo chattare. Dobbiamo configurare manualmente i permessi.
Apri il file di configurazione di OpenClaw:
nano ~/.openclaw/openclaw.json
Trova l’opzione
toolse modificaprofileedexeccome mostrato."tools": { "profile": "coding", "exec": { "secrity": "full" } },
Salva ed esci.
Inserisci il seguente comando nel terminale per riavviare l’OpenClaw Gateway:
openclaw gateway restartOra, OpenClaw dovrebbe avere i permessi di lettura e scrittura ed essere in grado di operare sul tuo sistema Raspberry Pi.
Problemi di PiCrawler
D: PiCrawler non risponde ai comandi. Cosa devo fare?
Per prima cosa, verifica che PiCrawler sia correttamente collegato e acceso. Quindi testa le funzionalità di base:
python3 ~/.openclaw/workspace/skills/picrawler-control/scripts/pc.py pose sit --speed 40Se questo fallisce, assicurati che le librerie Python richieste siano installate:
python3 -c "import picrawler; import robot_hat; import vilib"
D: Il test import picrawler fallisce.
Ciò significa che la libreria Python di PiCrawler non è installata correttamente. Consulta la guida all’installazione ufficiale di PiCrawler per installare le librerie necessarie. Puoi anche eseguire lo script di installazione incluso:
bash ~/.openclaw/workspace/skills/picrawler-control/install.sh
D: OpenClaw non riconosce la competenza PiCrawler.
Ricorda a OpenClaw di sincronizzare le competenze dicendo nel TUI: «Please rsync my skills» o riavvia l’OpenClaw Gateway:
openclaw gateway restart
D: I movimenti di PiCrawler sembrano instabili o a scatti.
Questo è solitamente causato dall’esecuzione di azioni a una velocità troppo elevata o senza consentire il completamento dell’azione precedente. La competenza applica regole di sicurezza (alzarsi prima di muoversi, sedersi dopo il movimento) e consiglia intervalli di velocità. Prova a ridurre il parametro di velocità (ad esempio,
--speed 40) o ad aggiungere brevi pause tra comandi consecutivi.