Nota
Ciao, benvenuto nella Community di appassionati di SunFounder Raspberry Pi, Arduino e ESP32 su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino e ESP32 insieme ad altri appassionati.
Perché unirti?
Supporto esperto: Risolvi i problemi post-vendita e affronta le sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e alle anteprime.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e giveaway: Partecipa a promozioni festive e concorsi a premi.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
6.1 - Misurare la Distanza
Il modulo sensore ultrasonico funziona secondo il principio dei sistemi sonar e radar per determinare la distanza da un oggetto.
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK PER L’ACQUISTO |
|---|---|---|
Kepler Kit |
450+ |
Puoi anche acquistarli separatamente dai link qui sotto.
SN |
INTRODUZIONE COMPONENTE |
QUANTITÀ |
LINK PER L’ACQUISTO |
|---|---|---|---|
1 |
1 |
||
2 |
Cavo Micro USB |
1 |
|
3 |
1 |
||
4 |
Diversi |
||
5 |
1 |
Schema
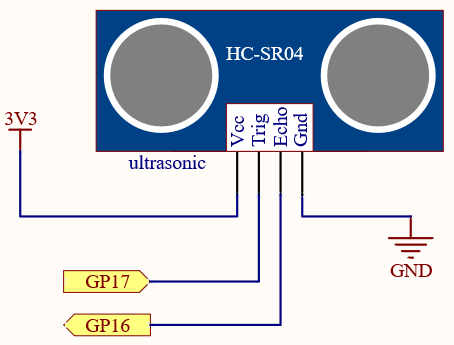
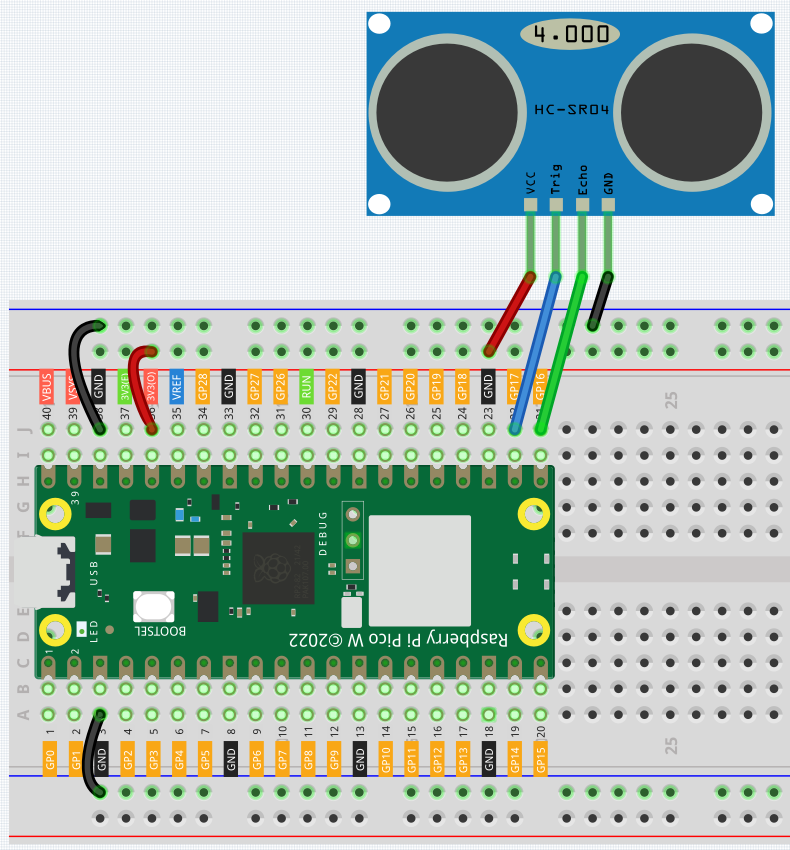
Collegamenti
Codice
Nota
Puoi aprire il file
6.1_ultrasonic.inonel percorsokepler-kit-main/arduino/6.1_ultrasonic.Oppure copia questo codice nell”Arduino IDE.
Non dimenticare di selezionare la scheda (Raspberry Pi Pico) e la porta corretta prima di cliccare sul pulsante Upload.
Una volta avviato il programma, il Monitor Seriale mostrerà la distanza del sensore ultrasonico dall’ostacolo di fronte.
Come funziona?
Per quanto riguarda l’applicazione del sensore ultrasonico, possiamo verificare direttamente la sottoprocedura.
float readSensorData(){// ...}
PING è attivato da un impulso HIGH di 2 o più microsecondi. (Fornisci un
breve impulso LOW prima per garantire un impulso HIGH pulito.)
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
Il pin echo viene utilizzato per leggere il segnale da PING, un impulso HIGH
la cui durata è il tempo (in microsecondi) dal momento dell’invio del ping alla
ricezione dell’eco dell’oggetto.
microsecond=pulseIn(echoPin, HIGH);
La velocità del suono è di 340 m/s o 29 microsecondi per centimetro.
Questo valore fornisce la distanza percorsa dal ping, andata e ritorno, quindi dividiamo per 2 per ottenere la distanza dell’ostacolo.
float distance = microsecond / 29.00 / 2;
Nota che il sensore ultrasonico metterà in pausa il programma mentre è in funzione, il che potrebbe causare qualche ritardo quando si scrivono progetti complessi.