Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.7 Schwenk-Servo
In diesem Projekt verwenden wir ein Servo und ein Potentiometer, um ein Lenkrad zu simulieren. Das Drehen des Potentiometers bewirkt, dass das Servo gleichzeitig schwenkt.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein komplettes Set zu kaufen. Hier ist der Link:
Name |
KOMPONENTEN IN DIESEM SET |
LINK |
|---|---|---|
Kepler Kit |
450+ |
Alternativ können Sie die Komponenten auch einzeln über die untenstehenden Links kaufen.
SN |
KOMPONENTE |
ANZAHL |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 |
||
6 |
1 |
Verkabelung
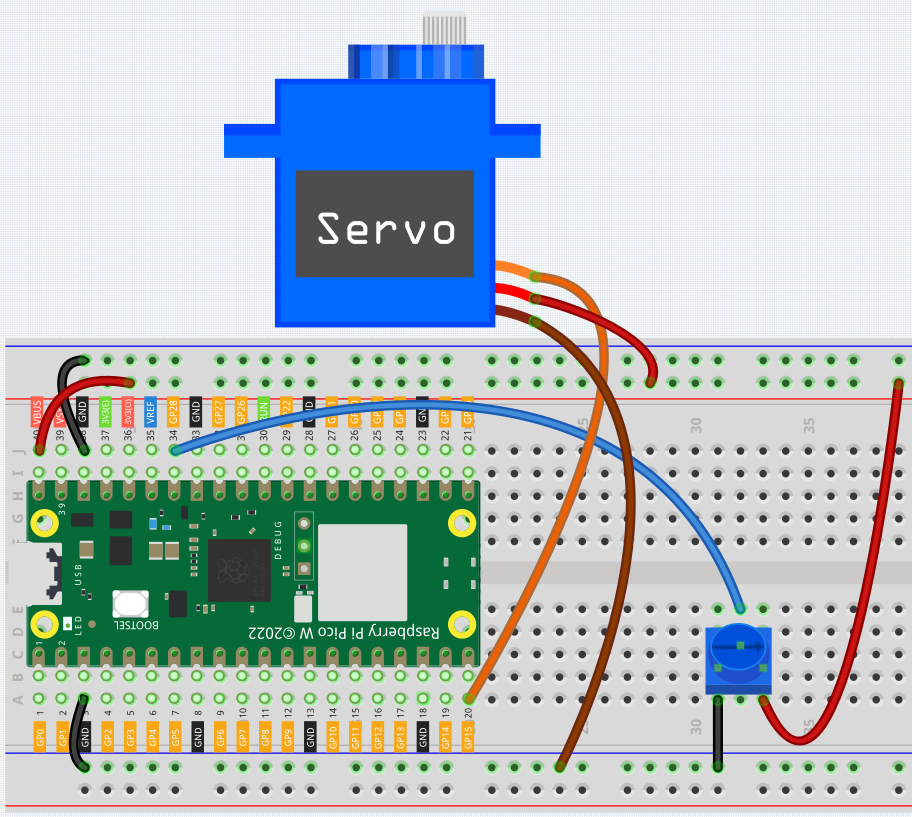
Das orangefarbene Kabel (Signal) des Servos ist mit GP15 verbunden, das rote Kabel (Strom) mit VBUS und das braune Kabel (Masse) mit GND.
Das Potentiometer ist ein Widerstandselement mit 3 Anschlüssen: Die beiden äußeren Pins sind mit 5V und GND verbunden, der mittlere Pin mit GP26(A0).
Code
Bemerkung
Sie können sich an der untenstehenden Abbildung orientieren, um den Code per Drag-and-Drop zu erstellen.
Importieren Sie
2.7_swing_servo.pngaus dem Pfadkepler-kit-main\piper. Detaillierte Anleitungen finden Sie unter Code importieren.
Nach dem Anschluss des Pico W klicken Sie auf die Start-Taste und der Code wird ausgeführt.
Drehen Sie das Potentiometer und das Servo folgt. Um es deutlich zu sehen, können Sie einen Steuerknüppel in die Servo-Welle einsetzen.
Funktionsweise
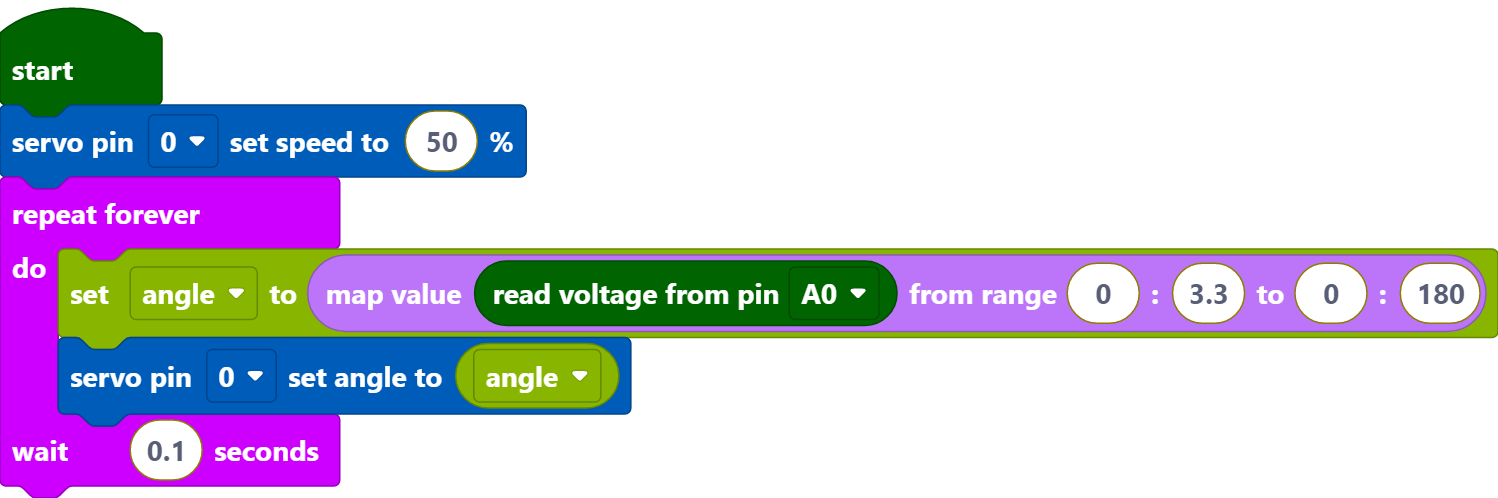
Stellen Sie die Rotationsgeschwindigkeit von Pin 15 (Servo) auf 15% ein.
[servo pin() set speed to ()%]: Dient zur Einstellung der Rotationsgeschwindigkeit des Servo-Pins. Der Bereich liegt zwischen 0% und 100%.
Erstellen Sie eine Variable [Winkel], lesen Sie dann die Spannung von A0. Verwenden Sie den Block [Wert () von () bis () umrechnen], um die Spannung von A0 im Bereich von 0 bis 3,3V auf einen Winkelbereich von 0 bis 180° umzurechnen. Nutzen Sie den umgerechneten Winkel als Rotationswinkel des Servos.
[Wert () von () bis () umrechnen]: Ein Wert wird von einem Bereich in einen anderen umgerechnet.
Bemerkung
Die Spannung von A0~A2 liegt im Bereich von 0~3,3V, selbst wenn Ihre Stromversorgung an VBUS (5V) angeschlossen ist.