Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.9 Glückskatze
In diesem Projekt verwenden wir ein PIR-Modul und ein Servo, um eine Glückskatze zu bauen. Das PIR-Modul dient zur Erkennung von Besuchern, während das Servo die winkende Bewegung der Glückskatze nachahmt.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Ein komplettes Set zu kaufen ist definitiv praktisch. Hier ist der Link:
Name |
KOMPONENTEN IN DIESEM SET |
LINK |
|---|---|---|
Kepler Kit |
450+ |
Sie können die Komponenten auch einzeln über die untenstehenden Links erwerben.
SN |
KOMPONENTE |
ANZAHL |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 |
||
6 |
1 |
Verkabelung
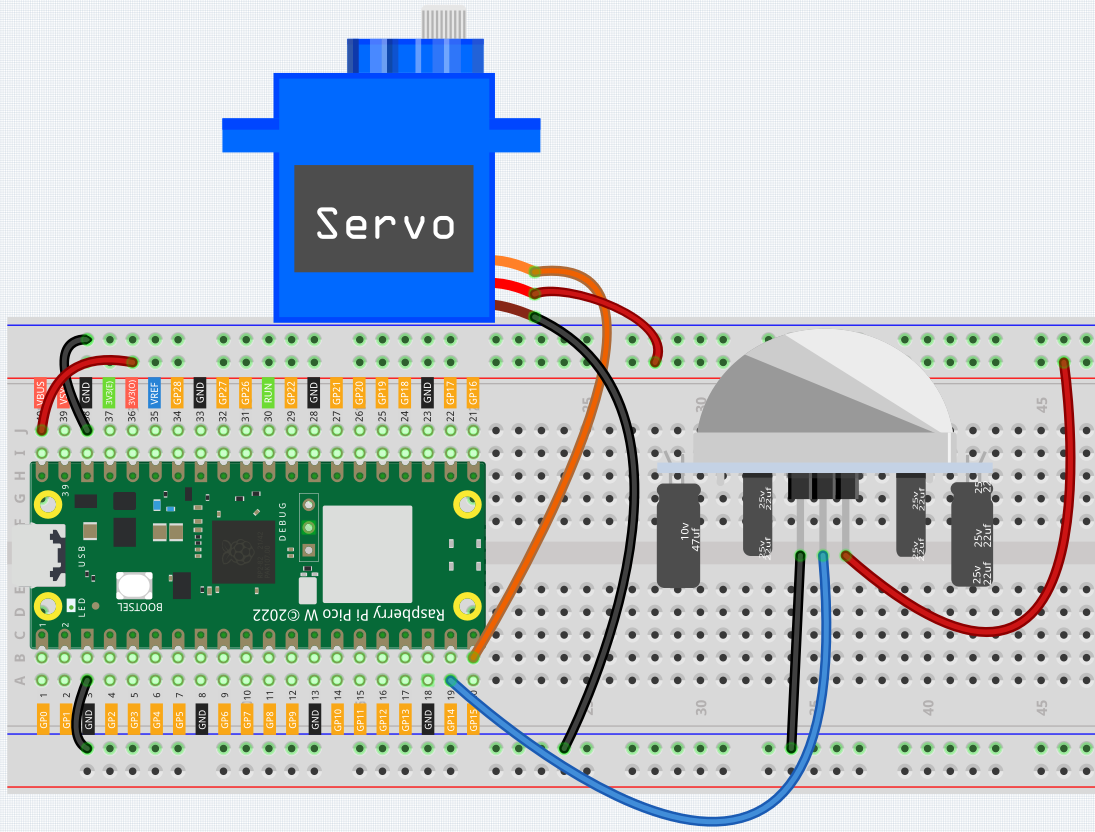
Das orangefarbene Kabel (Signal) des Servos ist mit GP15 verbunden, das rote Kabel (Stromversorgung) mit VBUS und das braune Kabel (Masse) mit GND.
Der mittlere Pin des PIR-Moduls ist mit GP3 verbunden.
Code
Bemerkung
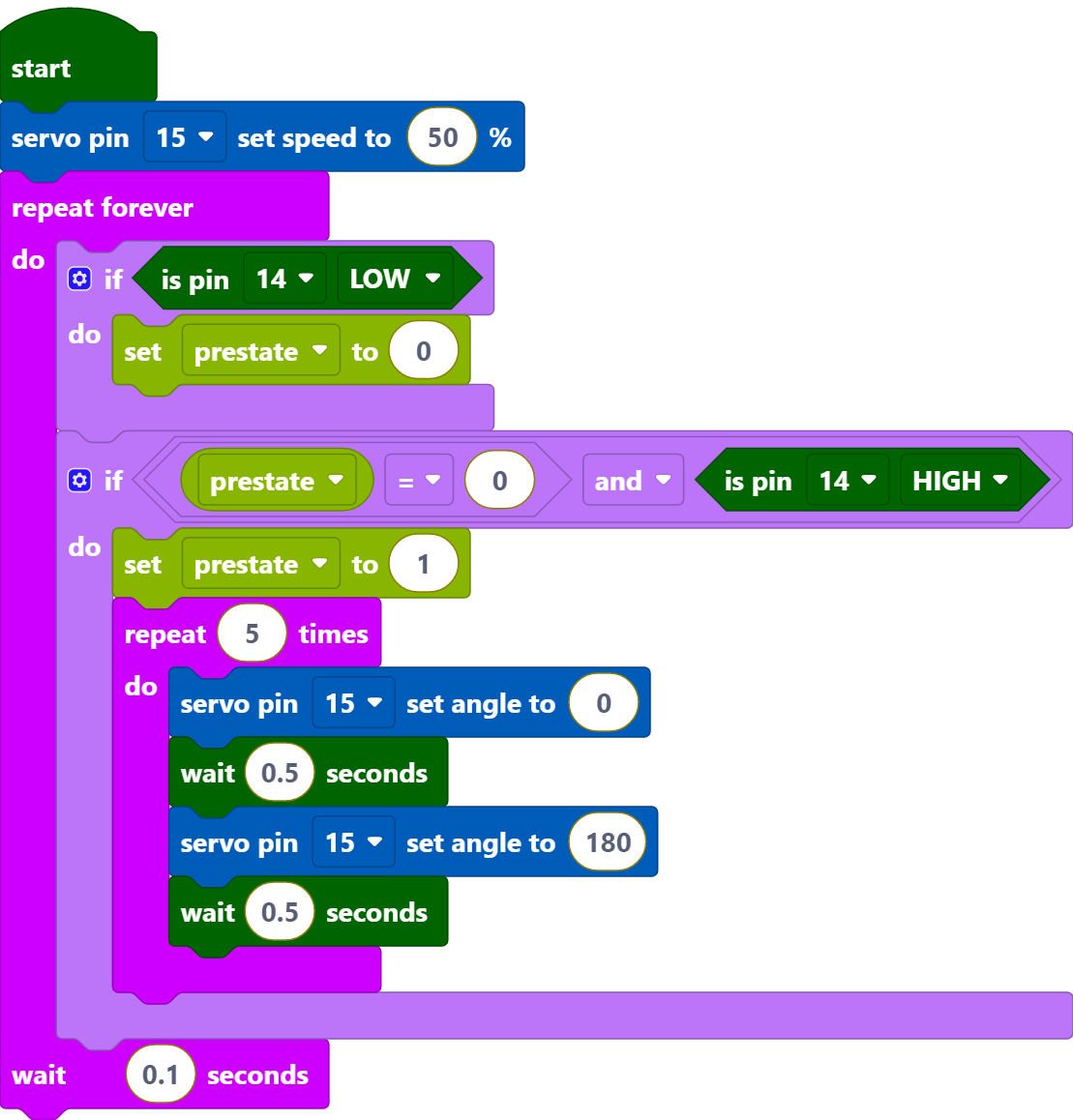
Sie können sich an der Abbildung unten orientieren, um den Code per Drag-and-Drop zu schreiben.
Importieren Sie
2.9_lucky_cat.pngaus dem Verzeichniskepler-kit-main\piper. Detaillierte Anleitungen finden Sie unter Code importieren.
Nach dem Anschluss des Pico W klicken Sie auf die Start-Taste, und der Code wird ausgeführt.
Wenn das PIR-Modul einen Kunden erkennt, schwingt das Servo fünfmal hin und her und bleibt dann stehen.
So funktioniert es
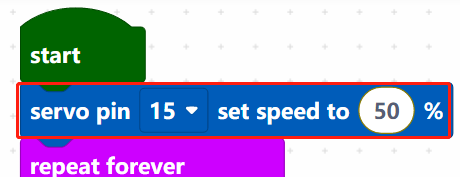
Stellen Sie die Drehgeschwindigkeit des Pins15 (Servo) auf 15% ein.
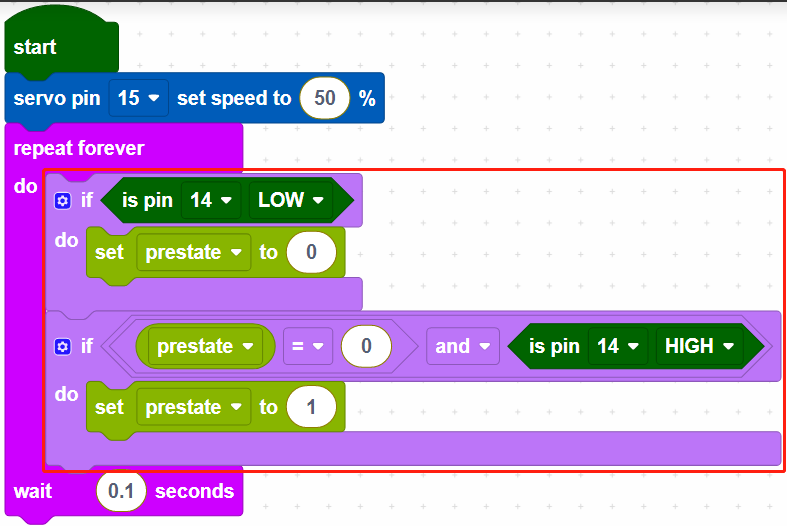
Wenn GP14 niedrig ist, setzen Sie die Variable [prestate] auf 0. Wenn die Variable [prestate] 0 ist und GP14 hoch ist (Mensch erkannt), setzen Sie die Variable [prestate] auf 1.
Ziel ist es, den Hauptcode nur auszuführen, wenn GP14 von niedrig auf hoch wechselt, und nur einmal zu reagieren, wenn das PIR-Modul weiterhin Menschen erkennt.
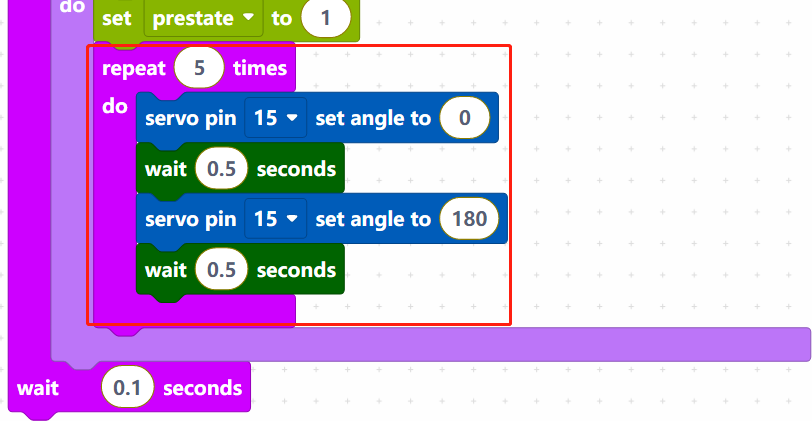
Lassen Sie das Servo 5-mal zwischen 0 und 180 Grad rotieren.
[repeat () times do]: Führen Sie den Code im Do-Block eine bestimmte Anzahl von Malen aus.