注釈
SunFounderのRaspberry Pi & Arduino & ESP32愛好家Facebookコミュニティへようこそ!仲間の愛好家と一緒に、Raspberry Pi、Arduino、ESP32をより深く探求しましょう。
参加する理由
エキスパートサポート:コミュニティとチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換しましょう。
限定プレビュー:新製品の発表や先行公開にいち早くアクセスできます。
特別割引:最新製品を特別割引価格でご購入いただけます。
お祭りキャンペーンとプレゼント:プレゼント企画やホリデープロモーションに参加しましょう。
👉 一緒に探求し創造する準備はできましたか? [here] をクリックして今すぐ参加しましょう!
サーボ
サーボは、特定の角度位置を精密に制御することで知られる特殊なモーターです。

茶色の線: GND
オレンジ色の線: 信号ピン、メインボードの PWM ピンに接続します。
赤色の線: VCC
連続的に回転する通常のモーターとは異なり、サーボは正確な位置に移動し、その位置を正確に保持できます。これは、ギア、ポテンショメータ、制御回路の組み合わせによって実現されます。サーボは、物体やメカニズムの位置を精密に制御する必要があるさまざまなアプリケーションで一般的に使用されています。
特徴
モータータイプ: コアモーター
動作電圧: 4.8~6V DC
待機電流: ≤4 mA
消費電流(4.8V 無負荷時): ≦50mA
消費電流(6V 無負荷時): ≦60mA
ストール電流(4.8V ロック時): ≦550mA
ストール電流(6V ロック時): ≦650mA
定格トルク: 4.8V、≥0.6 kgf·cm; 6V、≥0.7 kgf·cm
最大トルク: 4.8V、≥1.4 kgf.cm; 6V、≥1.6 kgf.cm
無負荷速度: 4.8V、≦0.14sec/60°; 6V、≦0.12sec/60°
注記: トルク保護:≥0.9 kgf.cm; 5 秒連続後の停電保護
動作温度範囲: -10℃~+50℃
保管温度範囲: -20℃~+60℃
動作湿度範囲: ≤ 90%RH
保管湿度範囲: ≤ 90%RH
重量: 10± 0.5g
素材: ABS
動作角度: 180°±10°(500~2500us)
機械的限界角度: 360°
左右移動角度: ≤ 6°
中心偏差: ≤ 1°
バックラッシュ: ≤ 4 us
アンプタイプ: デジタル
ケーブル素材: Ф1.08、19 PVC
ケーブル長: 245±5mm(プラグを除く)
コネクタタイプ: JR2.54mm/3Pin
動作原理
サーボ内部では、いくつかの重要なコンポーネントがその独自の機能に貢献しています。中核となるのは、サーボに組み込まれた従来のモーターです。このモーターは大きなギアに複雑に連結され、さらにそのギアがモーターシャフト上の小さなギアとかみ合います。このギア構成により、モーターの高速な回転運動を、より低速でありながら強力な動きに効率的に変換します。
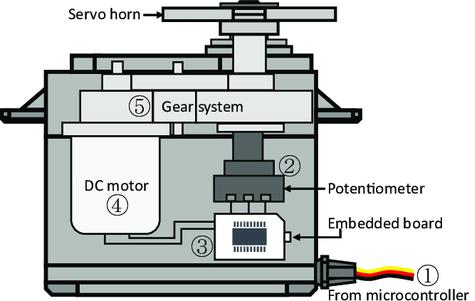
しかし、サーボ内部で真の魔法を生み出しているのは、「ポテンショメータ」として知られる微小な電子機器と高度な「制御回路」です。サーボが動くと、ポテンショメータが回転し、その電気抵抗が変化します。制御回路はこの抵抗の変化を驚くべき精度で検出および解釈し、それによってサーボの正確な位置を特定します。これはその独創性を示す証です。
サーボ制御の領域では、「パルス幅変調」または PWM と呼ばれる独自の信号方式が使用されます。これらのパルスの幅を巧みに調整することで、オペレーターはサーボに精密な動きを指示し、その位置を維持することができます。これがサーボモーター技術の本質であり、精度と制御が融合して、さまざまなアプリケーションを可能にしています。