注釈
SunFounderのRaspberry Pi & Arduino & ESP32愛好家Facebookコミュニティへようこそ!仲間の愛好家と一緒に、Raspberry Pi、Arduino、ESP32をより深く探求しましょう。
参加する理由
エキスパートサポート:コミュニティとチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換しましょう。
限定プレビュー:新製品の発表や先行公開にいち早くアクセスできます。
特別割引:最新製品を特別割引価格でご購入いただけます。
お祭りキャンペーンとプレゼント:プレゼント企画やホリデープロモーションに参加しましょう。
👉 一緒に探求し創造する準備はできましたか? [here] をクリックして今すぐ参加しましょう!
赤外線障害物回避モジュール
これは、前方の物体の有無を検出できる赤外線障害物回避モジュールです。ロボット、自動化システム、その他のインテリジェントデバイスで一般的に使用されています。検出範囲は 2cm から 40cm で、異なる色の物体は反射率が異なります。したがって、物体が暗いほど、検出距離は短くなります。

以下はピンの定義です:
GND: グランド
+: 電源、3.3 ~ 5V DC。
Out: デフォルトでは High 状態を維持し、障害物を検出した場合のみ Low になります。
EN: この ** イネーブル** ピンは、モジュールがいつ動作すべきかを決定します。デフォルトでは GND に接続されており、モジュールは常に動作状態にあります。
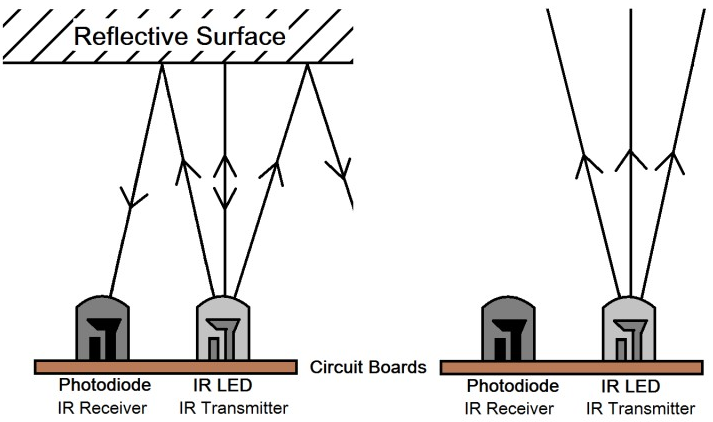
動作原理
このモジュールには、一対の IR 送信コンポーネントと受信コンポーネントが含まれています。基本的に、送信機は赤外線を放射し、放射された赤外線が障害物に当たると反射され、受信機によって受信されます。検出されると、インジケーターが点灯します。回路処理後、Low レベルの信号を出力します。
EN ピンの Low レベル状態がモジュールを作動させ、ジャンパーキャップが EN ピンを GND に固定しています。EN ピンをプログラムで制御するには、ジャンパーキャップを取り外します。

モジュールには 2 つのポテンショメータがあり、1 つは送信電力の調整用、もう 1 つは送信周波数の調整用です。これら 2 つのポテンショメータを調整することで、有効距離を調整できます。

検出距離の調整
障害物回避モジュールの検出範囲は、最適なパフォーマンスのために正確に調整する必要があります。デフォルトの工場出荷時設定は、特定の要件に合わない場合があるためです。
調整には以下の手順が含まれます:
モジュールの位置合わせ: 右側の障害物回避モジュールから始めます。輸送中にモジュールの赤外線送信機と受信機の位置がずれることがあります。精度を確保するために、手動で再調整する必要があります。
右側のモジュールの正面約 20 cm の位置に障害物を置きます。Rover キットの箱が最適です! 次に、モジュールのポテンショメータを、モジュールのインジケーターランプがちょうど点灯するまで回します。その後、障害物を前後に動かし続けて、希望の距離でインジケーターランプが点灯するか確認します。正しい距離でランプが点灯しない場合、または消えずに点灯したままの場合は、もう一方のポテンショメータを調整する必要があります。
もう一方のモジュールについても同じ手順を繰り返します。
特徴
動作電圧: 3.3 V ~ 5 V
出力: デジタル(オン/オフ)
検出しきい値: 2 つのポテンショメータで調整可能
距離範囲: 2 ~ 40 cm
調整 R5: 周波数調整 38 kHz(最適化済み)
調整 R6: IR LED デューティサイクル調整(最適化済み)
動作温度: -10 °C ~ +50 °C
有効角度: 35°
I/O インターフェース: 4 線式インターフェース(- / + / S / EN)
寸法: 45 x 16 x 10 mm
重量: 9 g