Nota
Ciao, benvenuto nella community SunFounder per appassionati di Raspberry Pi, Arduino e ESP32 su Facebook! Approfondisci la tua conoscenza di Raspberry Pi, Arduino e ESP32 con altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e anteprime.
Sconti speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca [qui] e unisciti oggi!
Gioco Rapido con l’APP
Pronto per iniziare la sua avventura su Marte? Con la funzione di avvio rapido dell’app RoboPilot, può iniziare a esplorare non appena il suo GalaxyRVR è assemblato.
Con RoboPilot, può:
Guidare il rover da una prospettiva in prima persona
Passare tra tre modalità di controllo: Remote, Avoid e Follow
Nota
Se ha sovrascritto il firmware e deve ripristinare la comunicazione, segua 3. Aggiornamento del Firmware della Scheda R3.
Guida rapida
Avvii il GalaxyRVR.
Prima di utilizzare GalaxyRVR per la prima volta, carichi completamente la batteria con il cavo USB Type-C in dotazione.
Accenda l’interruttore di alimentazione.
Porti l’interruttore di modalità su Run e prema il pulsante Reset sulla scheda R3.
La striscia luminosa inferiore lampeggerà di verde, indicando un avvio riuscito.
Installi RoboPilot da APP Store (iOS) o Google Play (Android).
Connetta il suo dispositivo mobile alla rete WiFi del GalaxyRVR.
Il nome della rete (SSID) è
GalaxyRVRe la password è12345678.Se vede un avviso che indica «Nessun accesso a Internet», scelga l’opzione «Resta connesso».

Apra RoboPilot. Faccia clic su “Go into” per entrare nell’interfaccia di controllo.
Modalità Remote
Entrando nell’interfaccia di controllo, vedrà la seguente schermata. Lo sfondo mostra la vista catturata dalla fotocamera del GalaxyRVR, con i widget di controllo remoto sovrapposti.
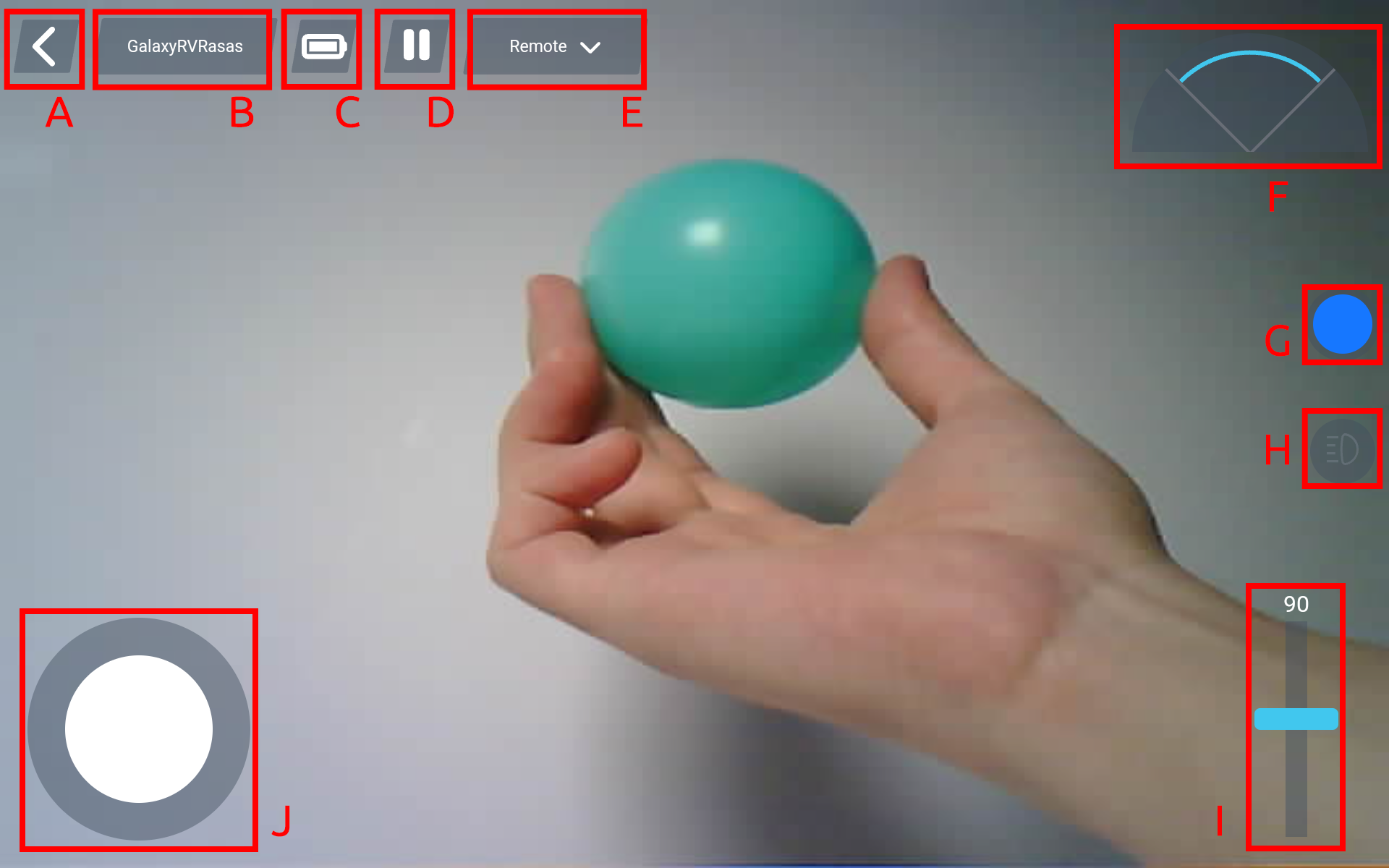
Ecco i controlli:
Indietro
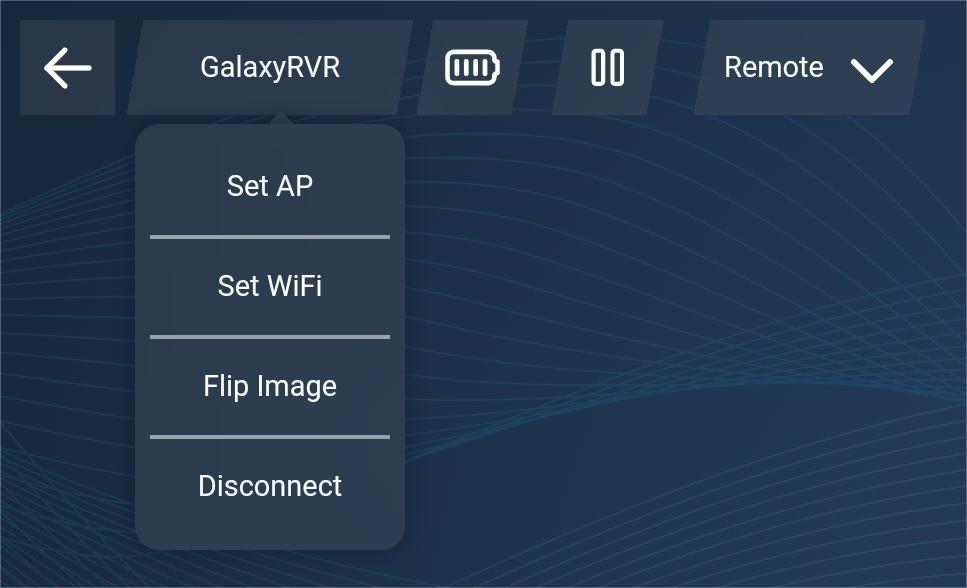
Impostazioni: Qui può cambiare il nome e la password dell’AP (hotspot), configurare il WiFi, capovolgere l’immagine e disconnettersi.
Indicatore livello batteria
Pausa/Avvia l’APP
Selezione modalità: Qui può scegliere tra Modalità Remote, Modalità Avoid e Modalità Follow. L’impostazione predefinita è la Modalità Remote.

Monitor ostacoli: Questo modulo è diviso in tre aree, con i lati sinistro e destro che mostrano i risultati dei moduli ostacoli, e l’area centrale che visualizza i risultati del sensore a ultrasuoni.
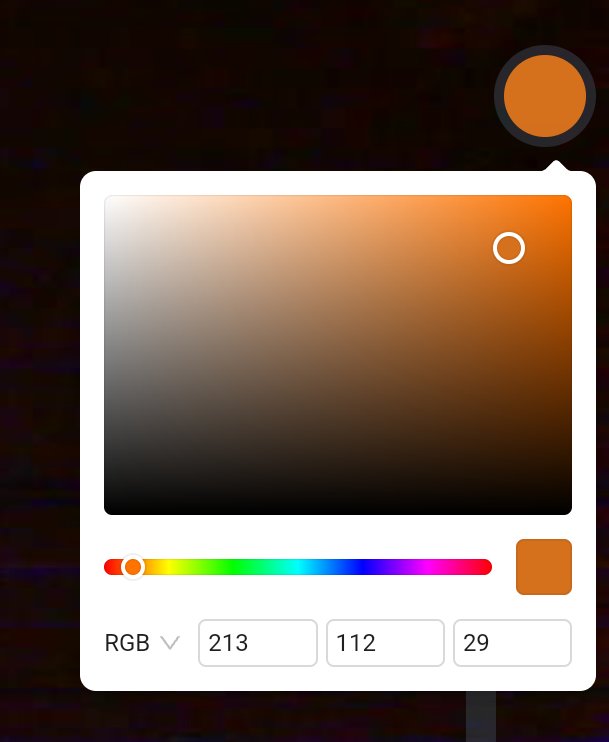
Selettore colore: Scelga qui il colore dell’illuminazione per il telaio.
Interruttore LED fotocamera.
Regola l’angolo del gimbal, che va da 0° a 130°. A 0°, guarda verso il cielo.
Muova il joystick per controllare il movimento di GalaxyRVR. Una spinta delicata farà muovere GalaxyRVR lentamente.
Modalità Avoid e Modalità Follow
Modalità Avoid: il GalaxyRVR avanzerà ed eviterà gli ostacoli sul suo percorso.
Modalità Follow: il GalaxyRVR si muoverà verso un oggetto di fronte a sé o girerà a sinistra o a destra per seguire il movimento dell’oggetto.
Quando seleziona la Modalità Avoid o la Modalità Follow, vedrà l’interfaccia sottostante. La vista in diretta della fotocamera di GalaxyRVR forma lo sfondo, con le opzioni di controllo sovrapposte.
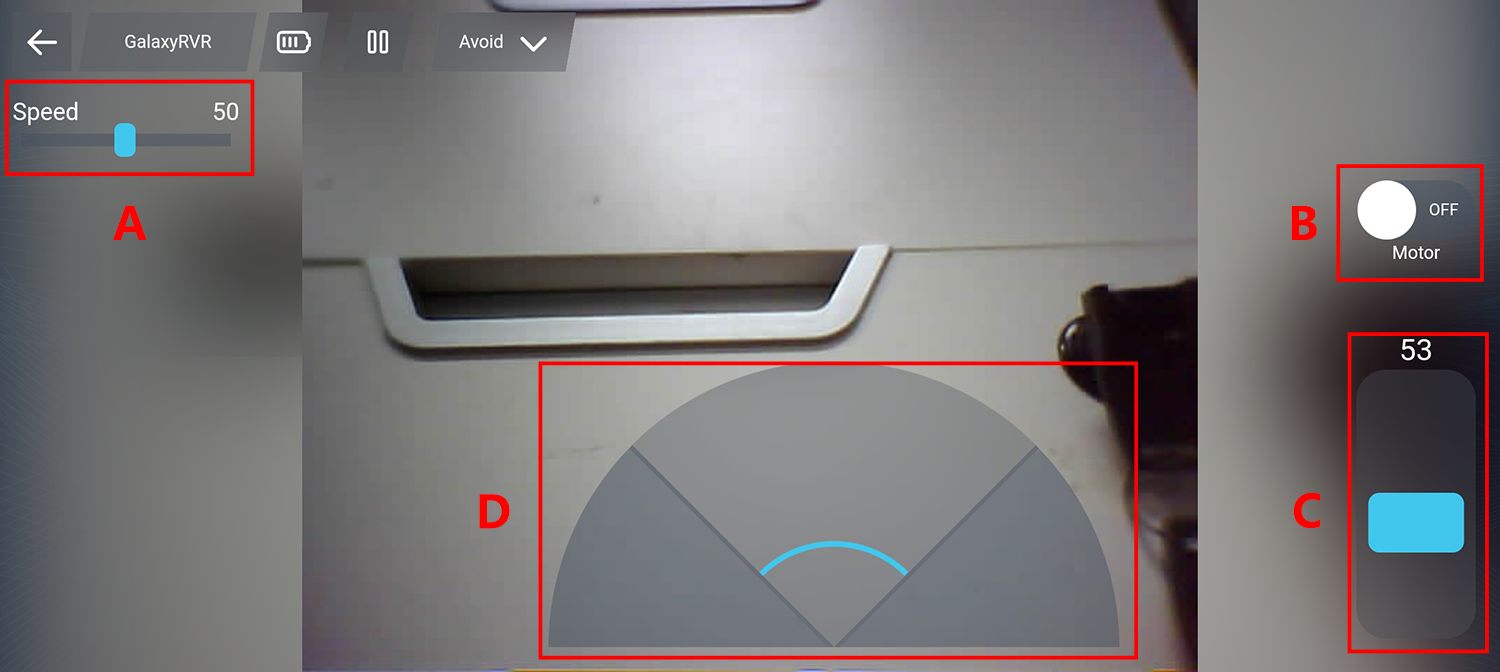
Controlli dell’interfaccia:
Controllo velocità - Regola la velocità di movimento di GalaxyRVR
Controllo motori - Avvia o ferma il movimento di GalaxyRVR
Controllo gimbal - Regola l’angolo della fotocamera da 0° (rivolta verso il cielo) a 130°
Monitor ostacoli - Feedback visivo dai sensori:
Sezioni sinistra/destra: Rilevamento ostacoli a infrarossi
Sezione centrale: Misurazioni di distanza a ultrasuoni
Regolazione della portata di rilevamento ostacoli
Prima di utilizzare questa modalità, calibri la portata di rilevamento dei sensori per adattarla al suo ambiente. Le impostazioni di fabbrica potrebbero non essere ottimali.
Troppo corta: Il rover potrebbe urtare gli ostacoli
Troppo lunga: Il rover potrebbe sterzare inutilmente
Procedura di calibrazione:
Inizi con il modulo destro
Si assicuri che trasmettitore e ricevitore siano correttamente allineati
Raddrizzi se piegato durante il trasporto
Testi e regoli la sensibilità
Posizioni un ostacolo a 20 cm di distanza (usi la scatola del Rover)
Giri il potenziometro finché l’indicatore si illumina
Verifichi l’attivazione costante alla distanza desiderata
Usi il secondo potenziometro se necessario
Ripeta per il modulo sinistro
Riconnessione
Se la rete si guasta o si disconnette, verrà indirizzato a questa pagina.
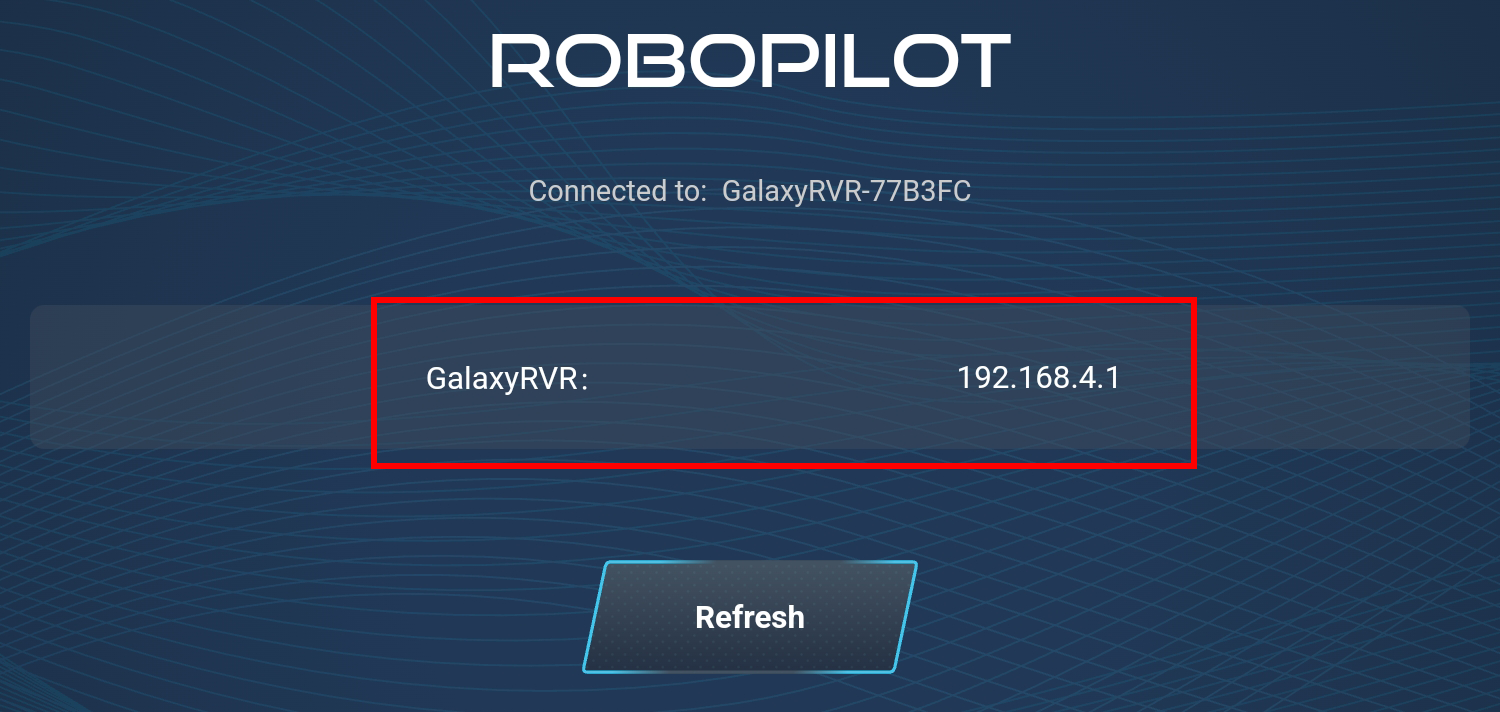
A questo punto, reimposti le impostazioni di rete, quindi faccia clic sull’IP corrispondente al suo GalaxyRVR per riconnettersi.