Note
Bonjour, bienvenue dans la communauté SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts sur Facebook ! Plongez plus profondément dans Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre & partager : Échangez des astuces et tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces et aperçus de nouveaux produits.
Réductions spéciales : Profitez de réductions exclusives sur nos nouveaux produits.
Promotions et cadeaux festifs : Participez à des tirages au sort et à des promotions de fêtes.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [Ici] et rejoignez-nous dès aujourd’hui !
2.1.6 Joystick (MCP3008)
Note
Selon la version de votre kit, identifiez si vous disposez du ADC0834 ou du MCP3008 et suivez la section correspondante.
Introduction
Dans ce projet, nous allons apprendre comment fonctionne un joystick. Nous manipulons le joystick et affichons les résultats à l’écran.
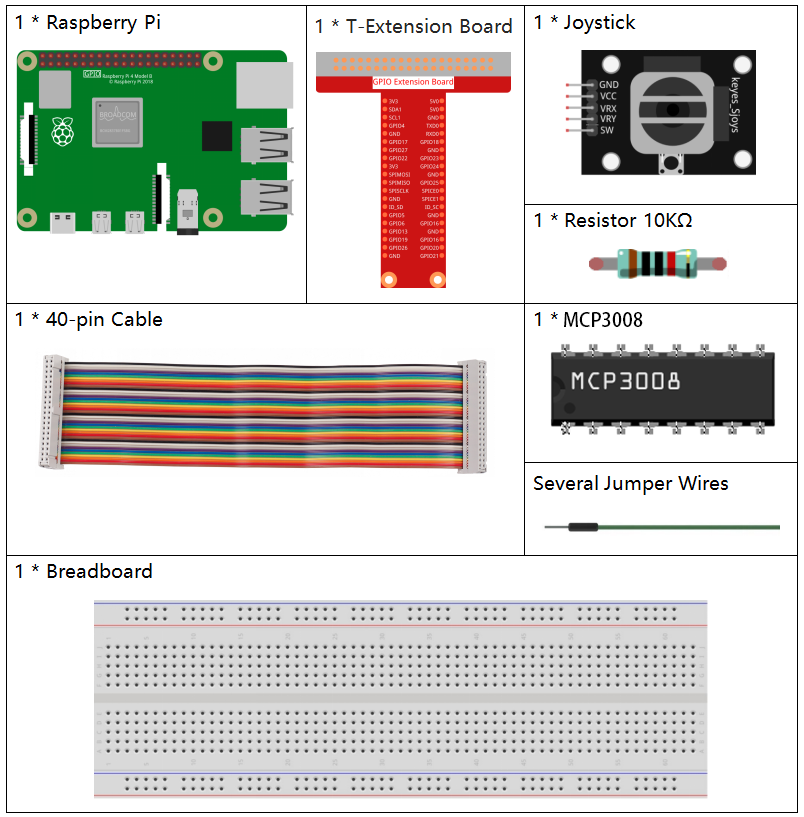
Composants nécessaires
Dans ce projet, nous avons besoin des composants suivants.
Principe
Joystick
L’idée de base d’un joystick est de traduire le mouvement d’un manche en informations électroniques qu’un ordinateur peut traiter.
Pour communiquer toute la gamme de mouvements à l’ordinateur, un joystick doit mesurer la position du manche sur deux axes : l’axe X (gauche à droite) et l’axe Y (haut et bas). Comme en géométrie, les coordonnées X-Y permettent de déterminer précisément la position du manche.
Pour déterminer la position, le système de contrôle du joystick surveille simplement la position de chaque axe. Le design conventionnel d’un joystick analogique fait cela grâce à deux potentiomètres, ou résistances variables.
Le joystick possède également une entrée numérique qui est activée lorsque l’on appuie sur le manche.

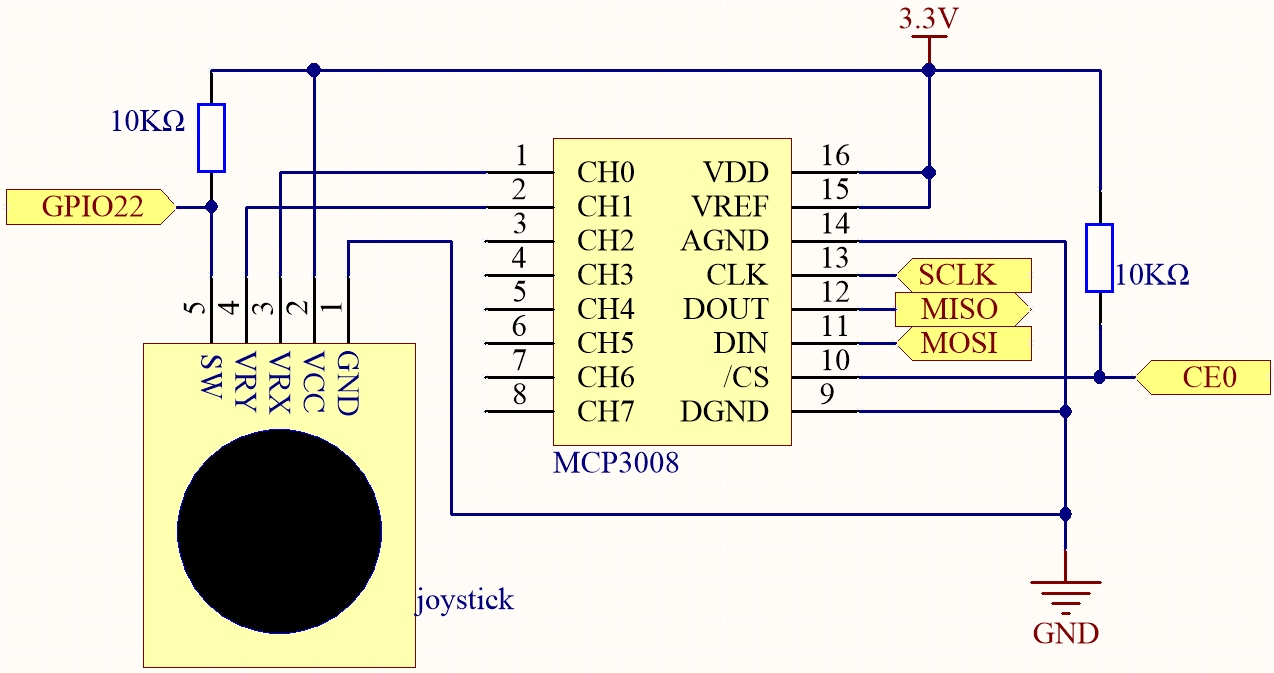
Schéma de câblage
Lors de la lecture des données du joystick, il existe des différences entre les axes : les données des axes X et Y sont analogiques et doivent être converties en valeurs numériques à l’aide du MCP3008. Les données de l’axe Z sont numériques ; on peut donc lire directement avec le GPIO ou utiliser également l’ADC.
Procédure expérimentale
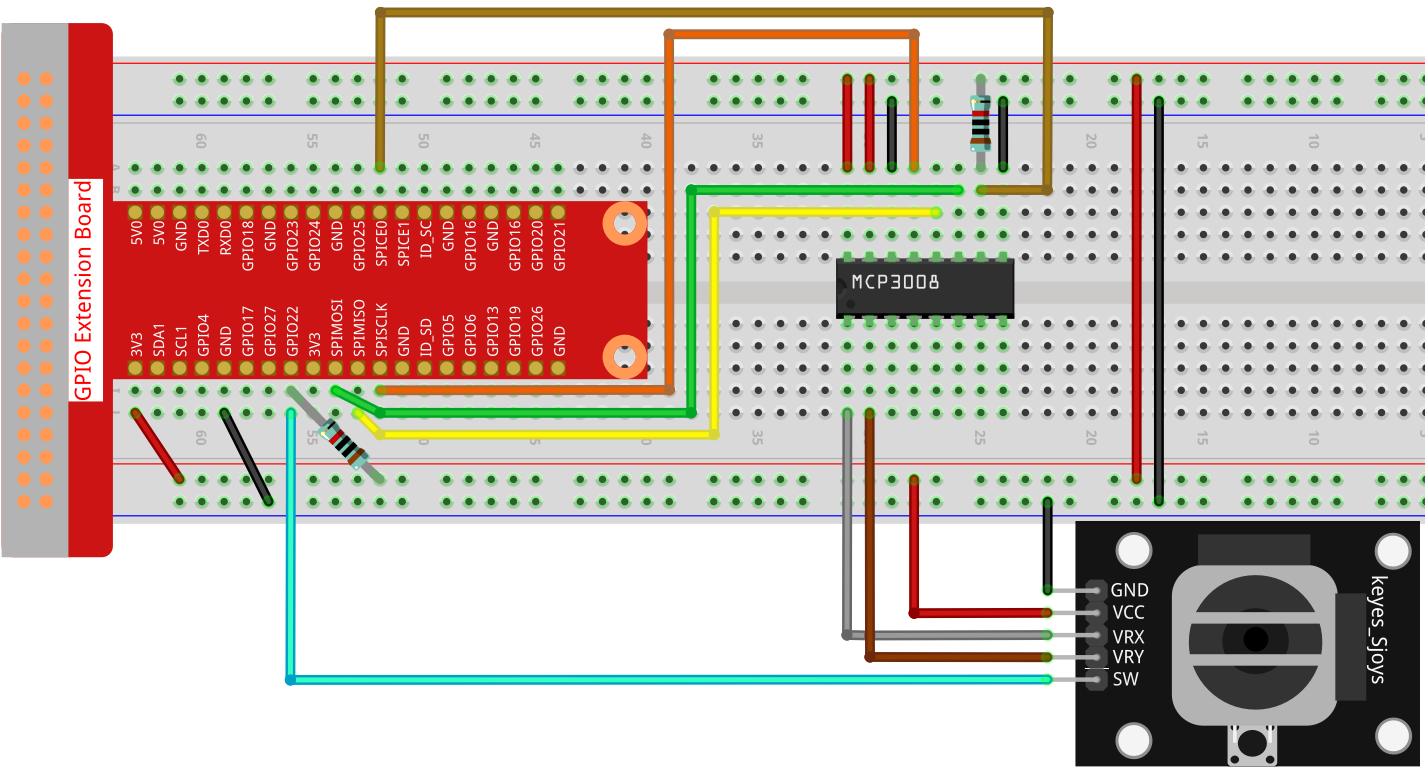
Étape 1 : Monter le circuit.
Étape 2 : Aller dans le dossier du code.
cd ~/davinci-kit-for-raspberry-pi/c/2.1.6-2/
Étape 3 : Compiler le code.
gcc 2.1.6_Joystick.c -o joystick -lwiringPi
Étape 4 : Exécuter le fichier compilé.
./joystick
Après l’exécution du code, tournez le joystick : les valeurs correspondantes de x, y et Btn s’affichent à l’écran.
Note
Si cela ne fonctionne pas après l’exécution, ou si un message d’erreur apparaît : « wiringPi.h: No such file or directory », veuillez vous référer à Installer et vérifier WiringPi.
Code
#include <wiringPi.h>
#include <wiringPiSPI.h>
#include <stdio.h>
#define SPI_CHANNEL 0
#define SPI_SPEED 1000000 // 1 MHz
#define BtnPin 3 // WiringPi 3 = BCM GPIO22
// Lecture depuis le canal MCP3008 (0–7)
int read_ADC(int channel) {
if (channel < 0 || channel > 7) return -1;
unsigned char buffer[3];
buffer[0] = 1; // Bit de démarrage
buffer[1] = (8 + channel) << 4; // Configuration du canal
buffer[2] = 0;
wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3);
int result = ((buffer[1] & 0x03) << 8) | buffer[2];
return result;
}
int main(void) {
if (wiringPiSetup() == -1) {
printf("Initialisation WiringPi échouée !\n");
return 1;
}
if (wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) {
printf("Initialisation SPI échouée !\n");
return 1;
}
pinMode(BtnPin, INPUT);
pullUpDnControl(BtnPin, PUD_UP);
while (1) {
int x_val = read_ADC(0); // VRX sur CH0
int y_val = read_ADC(1); // VRY sur CH1
int btn_val = digitalRead(BtnPin); // Bouton SW
printf("x = %d, y = %d, btn = %d\n", x_val, y_val, btn_val);
delay(100);
}
return 0;
}
Explication du code
Cette section initialise les bibliothèques nécessaires pour le GPIO et la communication SPI.
#include <wiringPi.h> #include <wiringPiSPI.h> #include <stdio.h> #define SPI_CHANNEL 0 #define SPI_SPEED 1000000 // 1 MHz #define BtnPin 3 // WiringPi 3 = BCM GPIO22
Définit une fonction
read_ADC()pour lire les données analogiques depuis le MCP3008. Elle communique via SPI pour demander les données d’un canal donné (0–7), puis analyse la réponse pour obtenir un résultat ADC sur 10 bits.int read_ADC(int channel) { if (channel < 0 || channel > 7) return -1; unsigned char buffer[3]; buffer[0] = 1; buffer[1] = (8 + channel) << 4; buffer[2] = 0; wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3); int result = ((buffer[1] & 0x03) << 8) | buffer[2]; return result; }
La fonction main initialise les interfaces WiringPi et SPI, configure la broche du bouton du joystick, puis lit en continu les valeurs et les affiche dans la console.
int main(void) { if (wiringPiSetup() == -1) { printf("Initialisation WiringPi échouée !\n"); return 1; } if (wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) { printf("Initialisation SPI échouée !\n"); return 1; } pinMode(BtnPin, INPUT); pullUpDnControl(BtnPin, PUD_UP); while (1) { int x_val = read_ADC(0); // VRX vers CH0 int y_val = read_ADC(1); // VRY vers CH1 int btn_val = digitalRead(BtnPin); // SW vers GPIO22 printf("x = %d, y = %d, btn = %d\n", x_val, y_val, btn_val); delay(100); } return 0; }
Dans ce programme :
Le VRX du joystick est connecté au CH0 du MCP3008.
Le VRY est connecté au CH1.
Le bouton (SW) est connecté au GPIO22 (broche 3 WiringPi).
La fonction
read_ADC()est utilisée pour lire les valeurs analogiques de VRX et VRY.La valeur numérique du bouton est lue avec
digitalRead().Toutes les valeurs sont affichées en continu toutes les 100 millisecondes.