Note
Bonjour et bienvenue dans la communauté SunFounder dédiée aux passionnés de Raspberry Pi, Arduino et ESP32 sur Facebook ! Plongez dans l’univers du Raspberry Pi, d’Arduino et d’ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez vos problèmes après-vente et relevez des défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des conseils et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux nouvelles annonces de produits et aux aperçus.
Réductions spéciales : Profitez de remises exclusives sur nos nouveaux produits.
Promotions festives et cadeaux : Participez à des tirages au sort et à des promotions spéciales pour les fêtes.
👉 Prêt(e) à explorer et à créer avec nous ? Cliquez sur [Ici] et rejoignez-nous dès aujourd’hui !
2.1.2 Interrupteur à glissière
Introduction
Dans cette leçon, nous allons apprendre à utiliser un interrupteur à glissière. Généralement, l’interrupteur à glissière est soudé sur un circuit imprimé (PCB) comme interrupteur d’alimentation, mais ici, nous l’insérons dans une breadboard, ce qui peut rendre sa fixation moins stable. Nous l’utilisons sur la breadboard pour démontrer son fonctionnement.
Composants
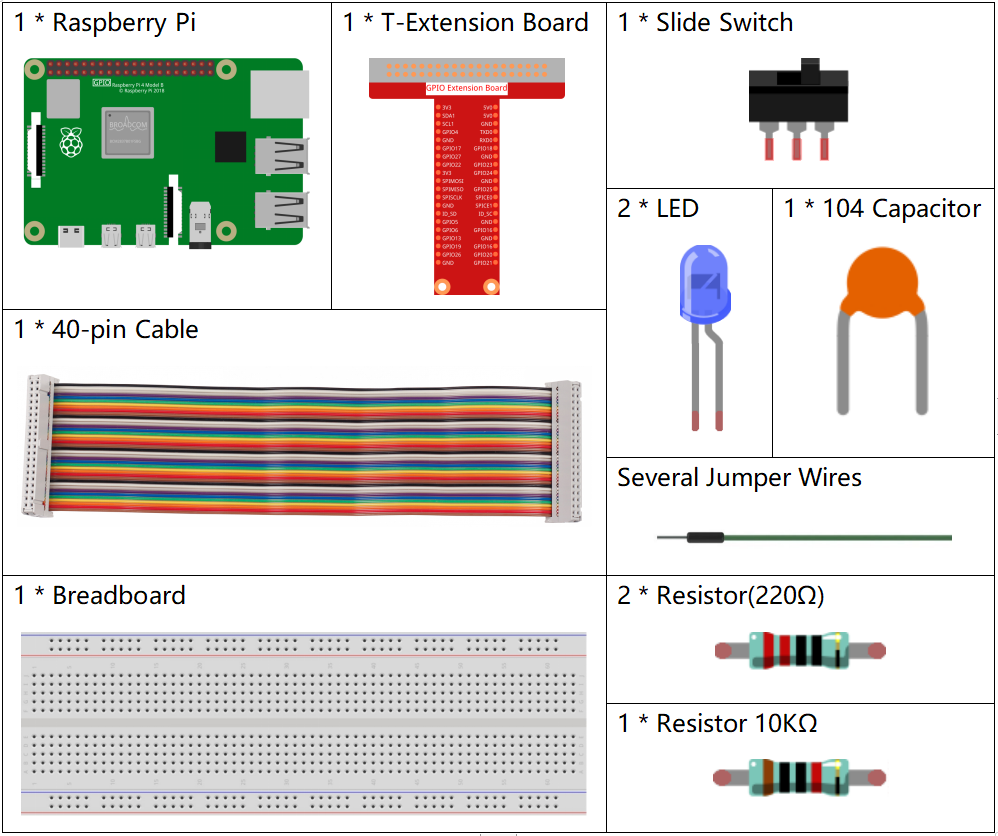
Principe
Interrupteur à glissière

Un interrupteur à glissière, comme son nom l’indique, fonctionne en déplaçant la barre de l’interrupteur pour connecter ou interrompre le circuit, permettant ainsi de commuter les circuits. Les types couramment utilisés sont SPDT, SPTT, DPDT, DPTT, etc. L’interrupteur à glissière est généralement utilisé dans les circuits basse tension. Il est apprécié pour sa flexibilité et sa stabilité, et il est largement utilisé dans les instruments électroniques et les jouets électriques.
Comment cela fonctionne : Utilisez la broche centrale comme broche fixe. Lorsque vous faites glisser le commutateur vers la gauche, les deux broches de gauche sont connectées ; lorsque vous le faites glisser vers la droite, les deux broches de droite sont connectées. Ainsi, il fonctionne comme un interrupteur pour connecter ou déconnecter les circuits. Voir le schéma ci-dessous :

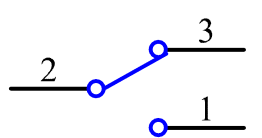
Le symbole de circuit de l’interrupteur à glissière est illustré ci-dessous. La broche 2 dans le schéma fait référence à la broche centrale.
Condensateur
Le condensateur est un composant capable de stocker de l’énergie sous forme de charge électrique ou de créer une différence de potentiel (tension statique) entre ses plaques, un peu comme une petite batterie rechargeable.
Unités standard de capacité
Microfarad (μF) 1μF = 1/1 000 000 = 0,000001 = \(10^{- 6}\) F
Nanofarad (nF) 1nF = 1/1 000 000 000 = 0,000000001 = \(10^{- 9}\) F
Picofarad (pF) 1pF = 1/1 000 000 000 000 = 0,000000000001 = \(10^{- 12}\) F
Note
Ici, nous utilisons un condensateur 104 (10 x 104pF). Comme pour les résistances, les chiffres sur les condensateurs permettent de lire les valeurs une fois assemblés sur le circuit. Les deux premiers chiffres représentent la valeur, et le dernier chiffre signifie le multiplicateur. Ainsi, 104 représente une puissance de 10 x 10 exposant 4 (en pF), soit 100 nF.
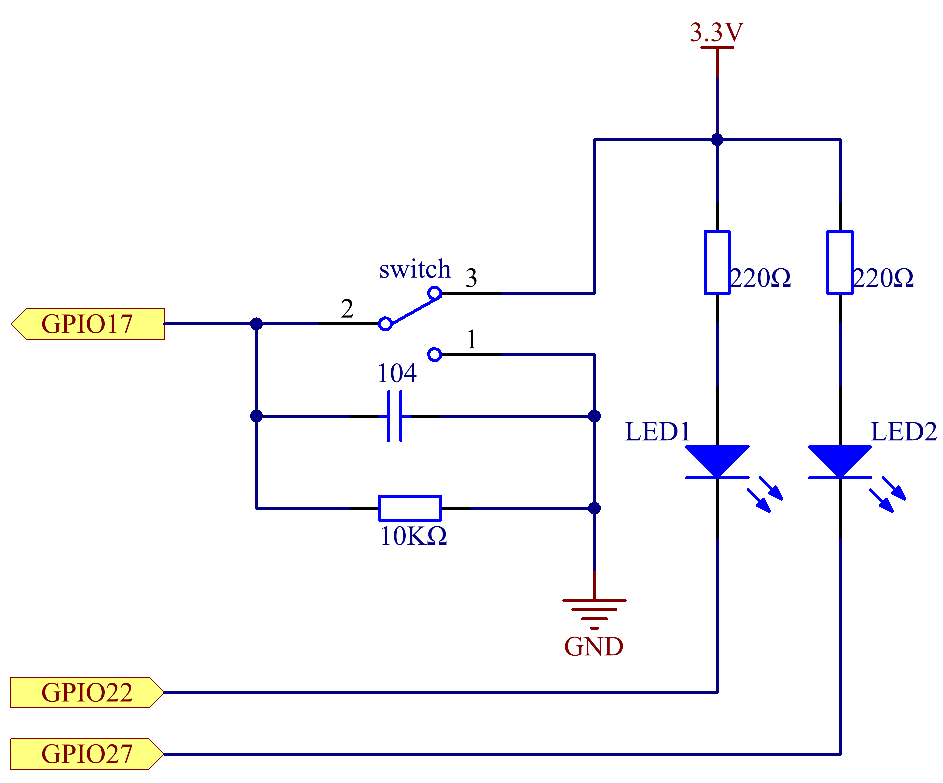
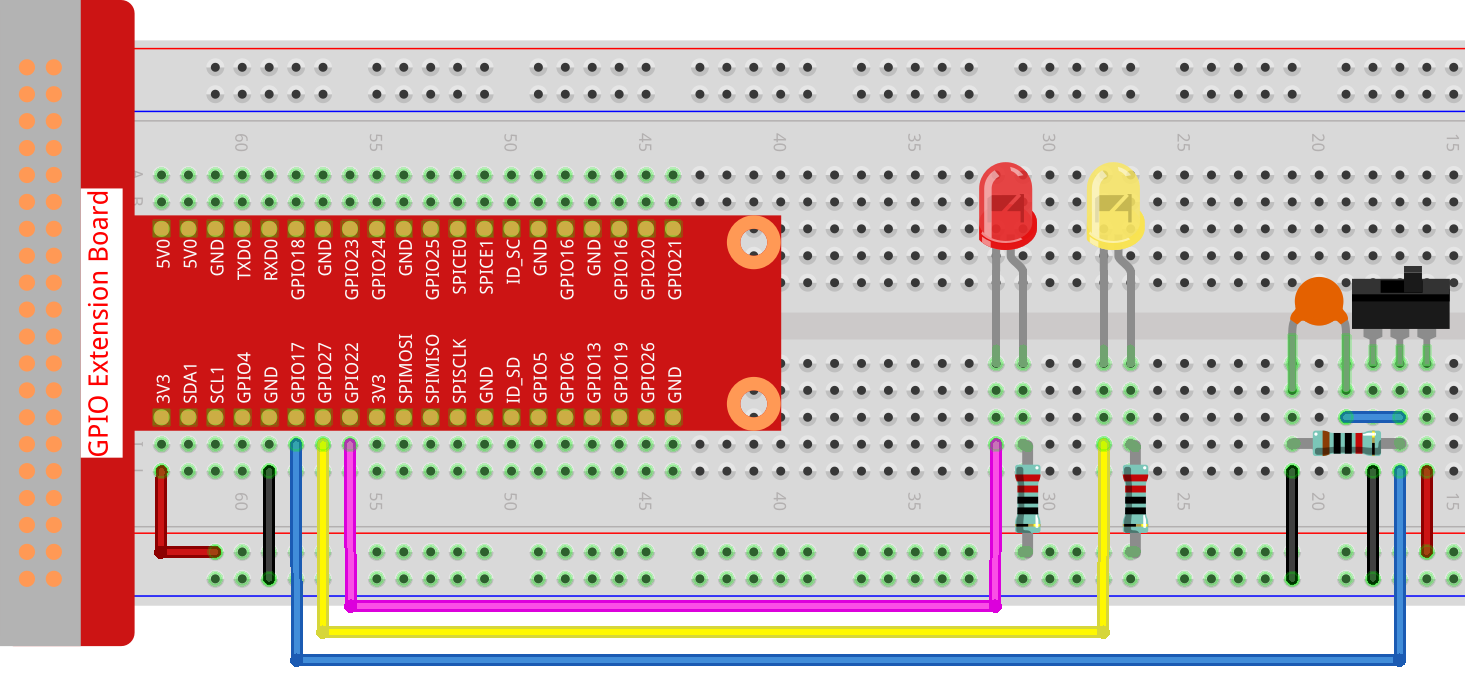
Schéma de câblage
Connectez la broche centrale de l’interrupteur à glissière au GPIO17, et deux LEDs aux broches GPIO22 et GPIO27 respectivement. Ainsi, lorsque vous faites glisser l’interrupteur, vous verrez les deux LEDs s’allumer alternativement.
Procédures expérimentales
Étape 1 : Montez le circuit.
Étape 2 : Accédez au dossier du code.
cd ~/davinci-kit-for-raspberry-pi/c/2.1.2
Étape 3 : Compilez le code.
gcc 2.1.2_Slider.c -lwiringPi
Étape 4 : Exécutez le fichier exécutable ci-dessus.
sudo ./a.out
Pendant l’exécution du code, faites glisser l’interrupteur vers la gauche, la LED jaune s’allume ; vers la droite, c’est la LED rouge qui s’allume.
Note
Si cela ne fonctionne pas après l’exécution, ou s’il y a un message d’erreur indiquant : "wiringPi.h: No such file or directory", veuillez consulter Le code C ne fonctionne pas ?.
Code
#include <wiringPi.h>
#include <stdio.h>
#define slidePin 0
#define led1 3
#define led2 2
int main(void)
{
// Si l'initialisation de wiringPi échoue, afficher un message à l'écran
if(wiringPiSetup() == -1){
printf("setup wiringPi failed !");
return 1;
}
pinMode(slidePin, INPUT);
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
while(1){
// interrupteur glissé vers la droite, led1 allumée
if(digitalRead(slidePin) == 1){
digitalWrite(led1, LOW);
digitalWrite(led2, HIGH);
printf("LED1 on\n");
delay(100);
}
// interrupteur glissé vers la gauche, led2 allumée
if(digitalRead(slidePin) == 0){
digitalWrite(led2, LOW);
digitalWrite(led1, HIGH);
printf(".....LED2 on\n");
delay(100);
}
}
return 0;
}
Explication du code
if(digitalRead(slidePin) == 1){
digitalWrite(led1, LOW);
digitalWrite(led2, HIGH);
printf("LED1 on\n");
}
Lorsque l’interrupteur est poussé vers la droite, la broche centrale et celle de droite sont connectées ; le Raspberry Pi lit un niveau haut à la broche centrale, donc la LED1 s’allume et la LED2 s’éteint.
if(digitalRead(slidePin) == 0){
digitalWrite(led2, LOW);
digitalWrite(led1, HIGH);
printf(".....LED2 on\n");
}
Lorsque l’interrupteur est poussé vers la gauche, la broche centrale et celle de gauche sont connectées ; le Raspberry Pi lit un niveau bas, donc la LED2 s’allume et la LED1 s’éteint.