Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
1.3.3 Stepper Motor
Introduction
Stepper motors, due to their unique design, can be controlled to a high degree of accuracy without any feedback mechanisms. The shaft of a stepper, mounted with a series of magnets, is controlled by a series of electromagnetic coils that are charged positively and negatively in a specific sequence, precisely moving it forward or backward in small "steps".
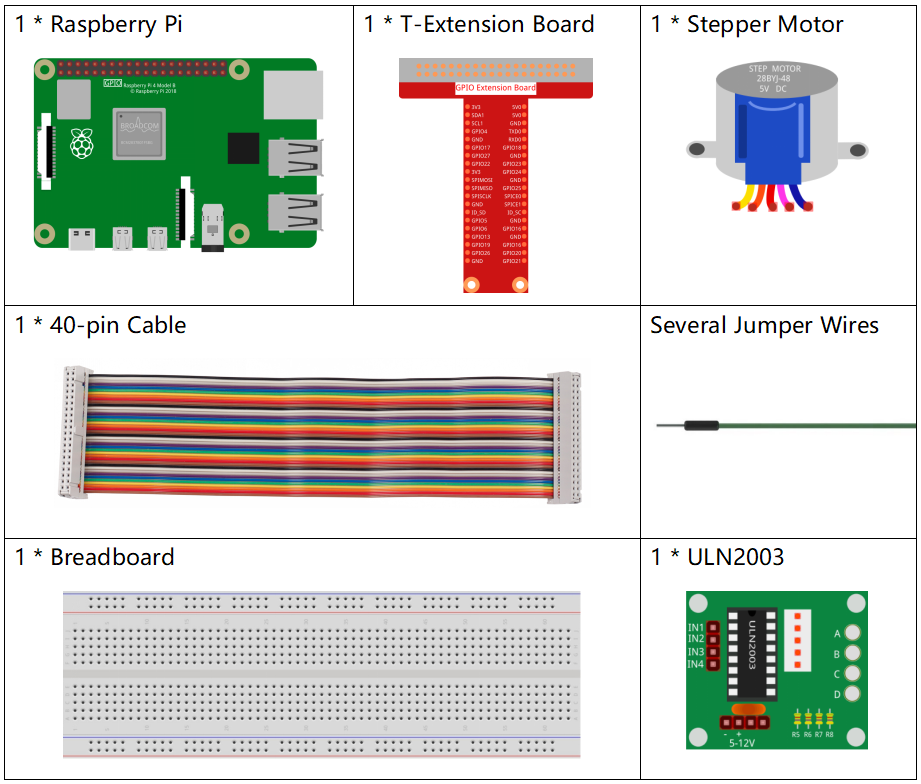
Required Components
In this project, we need the following components.
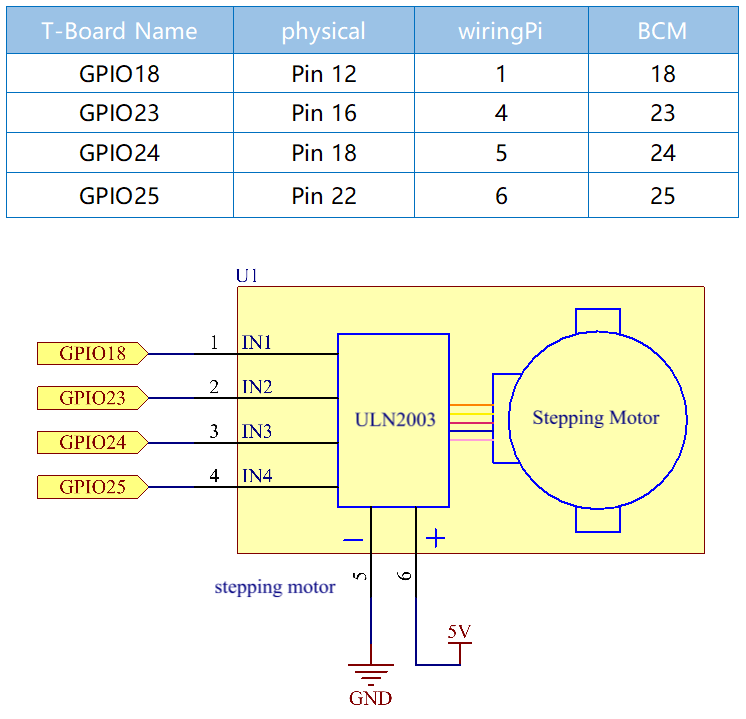
Schematic Diagram
Experimental Procedures
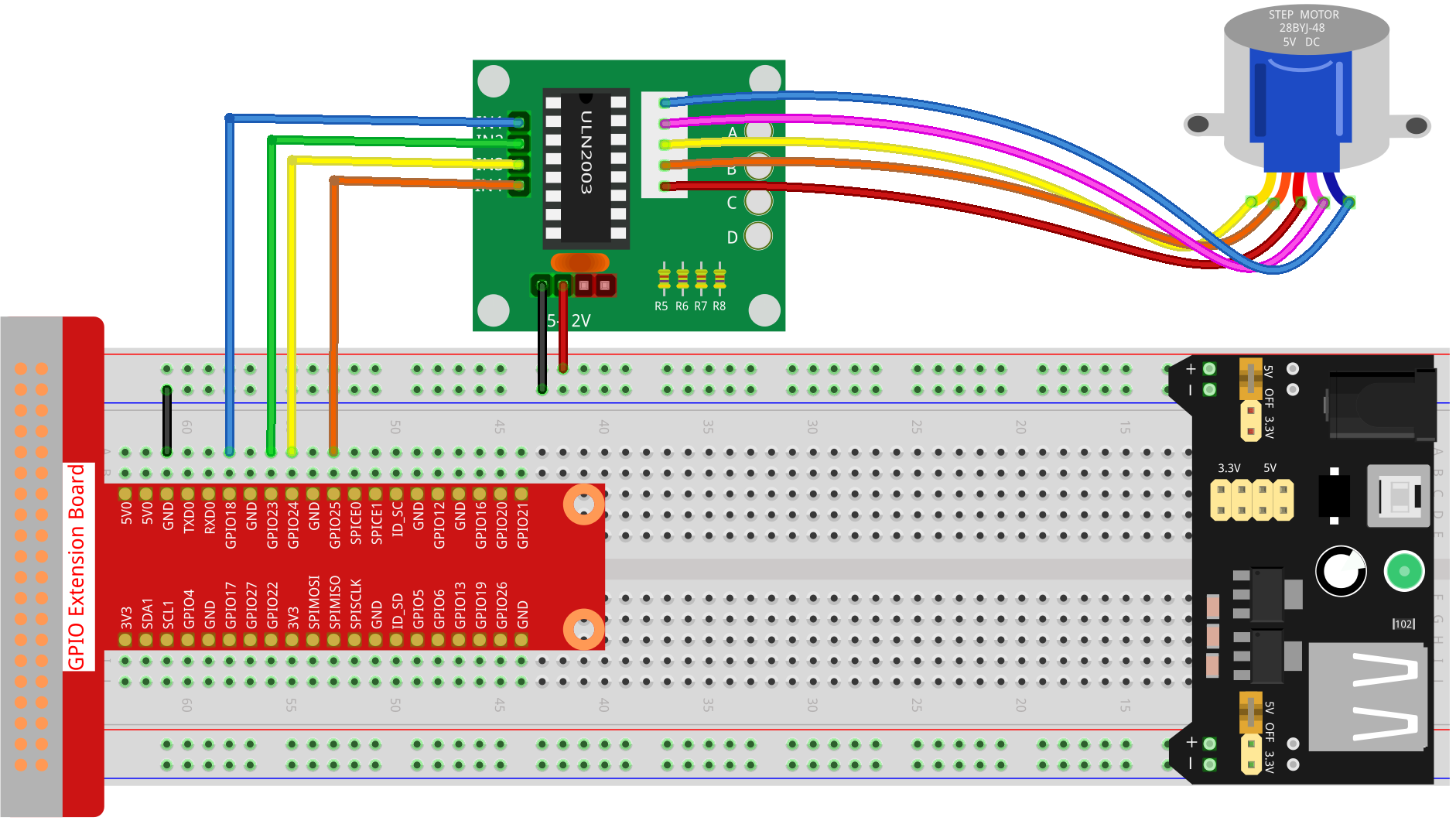
Step 1: Build the circuit.
Step 2: Open the code file.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Step 3: Run.
sudo python3 1.3.3_StepperMotor.py
As the code runs, the stepper motor will turn clockwise or anti-clockwise depending on your input 'a' or 'c'.
Warning
If there is an error prompt RuntimeError: Cannot determine SOC peripheral base address, please refer to If gpiozero doesn’t work.
Code
Note
You can Modify/Reset/Copy/Run/Stop the code below. But before that, you need to go to source code path like davinci-kit-for-raspberry-pi/python-pi5. After modifying the code, you can run it directly to see the effect.
#!/usr/bin/env python3
from gpiozero import OutputDevice
from time import sleep
# Initialize motor pins to GPIO pins 18, 23, 24, 25
motorPin = [OutputDevice(pin) for pin in (18, 23, 24, 25)]
# Set motor rotation speed parameters
rotationPerMinute = 15
stepsPerRevolution = 2048
# Calculate time to wait between each step for smooth motor operation
stepSpeed = (60 / rotationPerMinute) / stepsPerRevolution
def rotary(direction):
"""
Controls the rotation of the motor based on the specified direction.
:param direction: 'c' for clockwise, 'a' for anti-clockwise
"""
if direction == 'c':
# Execute the stepping sequence for clockwise rotation
for j in range(4):
for i in range(4):
if 0x99 << j & (0x08 >> i):
motorPin[i].on()
else:
motorPin[i].off()
sleep(stepSpeed)
elif direction == 'a':
# Execute the stepping sequence for anti-clockwise rotation
for j in range(4):
for i in range(4):
if 0x99 >> j & (0x08 >> i):
motorPin[i].on()
else:
motorPin[i].off()
sleep(stepSpeed)
def loop():
"""
Continuously prompts the user to select the motor rotation direction
and controls the motor based on this input.
"""
while True:
direction = input('Select motor direction a=anticlockwise, c=clockwise: ')
if direction == 'c':
print('Motor running clockwise\n')
break
elif direction == 'a':
print('Motor running anti-clockwise\n')
break
else:
print('Input error, please try again!')
# Keep the motor rotating in the selected direction
while True:
rotary(direction)
def destroy():
"""
Safely turns off all motor pins, used for clean shutdown.
"""
for pin in motorPin:
pin.off()
# Main program execution
try:
loop()
except KeyboardInterrupt:
destroy() # Handle keyboard interrupt to safely shut down the motor
Code Explanation
This section imports necessary libraries.
gpiozerofor controlling GPIO pins andtimefor the sleep function used in timing control.#!/usr/bin/env python3 from gpiozero import OutputDevice from time import sleep
Initializes GPIO pins 18, 23, 24, and 25 as output devices for controlling the stepper motor.
# Initialize motor pins to GPIO pins 18, 23, 24, 25 motorPin = [OutputDevice(pin) for pin in (18, 23, 24, 25)]
Sets the motor’s rotation speed and calculates the time interval between each step for smooth operation.
# Set motor rotation speed parameters rotationPerMinute = 15 stepsPerRevolution = 2048 # Calculate time to wait between each step for smooth motor operation stepSpeed = (60 / rotationPerMinute) / stepsPerRevolution
The
rotaryfunction controls the motor’s rotation. It uses bit manipulation and a stepping sequence to activate the motor pins in the correct order for either clockwise or anti-clockwise rotation.def rotary(direction): """ Controls the rotation of the motor based on the specified direction. :param direction: 'c' for clockwise, 'a' for anti-clockwise """ if direction == 'c': # Execute the stepping sequence for clockwise rotation for j in range(4): for i in range(4): if 0x99 << j & (0x08 >> i): motorPin[i].on() else: motorPin[i].off() sleep(stepSpeed) elif direction == 'a': # Execute the stepping sequence for anti-clockwise rotation for j in range(4): for i in range(4): if 0x99 >> j & (0x08 >> i): motorPin[i].on() else: motorPin[i].off() sleep(stepSpeed)
This function continuously prompts the user to choose the motor rotation direction and controls the motor based on the input.
def loop(): """ Continuously prompts the user to select the motor rotation direction and controls the motor based on this input. """ while True: direction = input('Select motor direction a=anticlockwise, c=clockwise: ') if direction == 'c': print('Motor running clockwise\n') break elif direction == 'a': print('Motor running anti-clockwise\n') break else: print('Input error, please try again!') # Keep the motor rotating in the selected direction while True: rotary(direction)
The
destroyfunction turns off all motor pins. It’s used for a clean shutdown, ensuring that the motor stops safely when the program ends.def destroy(): """ Safely turns off all motor pins, used for clean shutdown. """ for pin in motorPin: pin.off()
The main program calls
loopand handles keyboard interrupts (like Ctrl+C) to safely shut down the motor usingdestroy.# Main program execution try: loop() except KeyboardInterrupt: destroy() # Handle keyboard interrupt to safely shut down the motor