Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in Raspberry Pi, Arduino und ESP32 ein – gemeinsam mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Löse Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu erweitern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und Vorschauen.
Sonderrabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nimm an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu erschaffen? Klicke auf [hier] und trete noch heute bei!
2.2.1 Fotowiderstand (MCP3008)
Bemerkung
Abhängig von deiner Kit-Version identifiziere bitte, ob du ADC0834 oder MCP3008 hast, und fahre mit dem entsprechenden Abschnitt fort.
Einführung
Der Fotowiderstand ist eine häufig verwendete Komponente zur Messung der Umgebungslichtintensität. Er hilft dem Controller, Tag und Nacht zu erkennen und ermöglicht Lichtsteuerungsfunktionen wie eine Nachtlampe. Dieses Projekt ähnelt stark dem Potentiometer – nur dass hier die Spannung in Abhängigkeit vom Licht gemessen wird.
Benötigte Komponenten
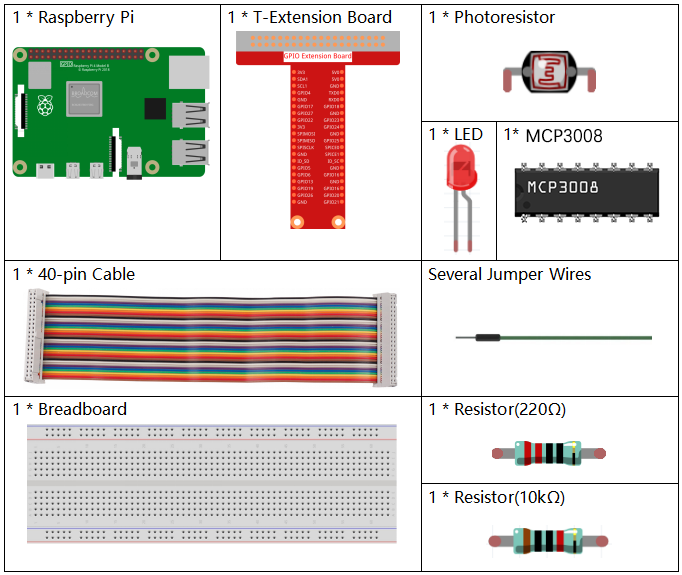
In diesem Projekt benötigen wir die folgenden Komponenten.
Funktionsprinzip
Ein Fotowiderstand oder eine Fotodiode ist ein lichtgesteuerter variabler Widerstand. Der Widerstand eines Fotowiderstands sinkt mit zunehmender Lichtintensität – er zeigt also Photoleitfähigkeit. Fotowiderstände können in lichtempfindlichen Detektorschaltungen sowie in Hell-/Dunkel-gesteuerten Schaltungen eingesetzt werden.

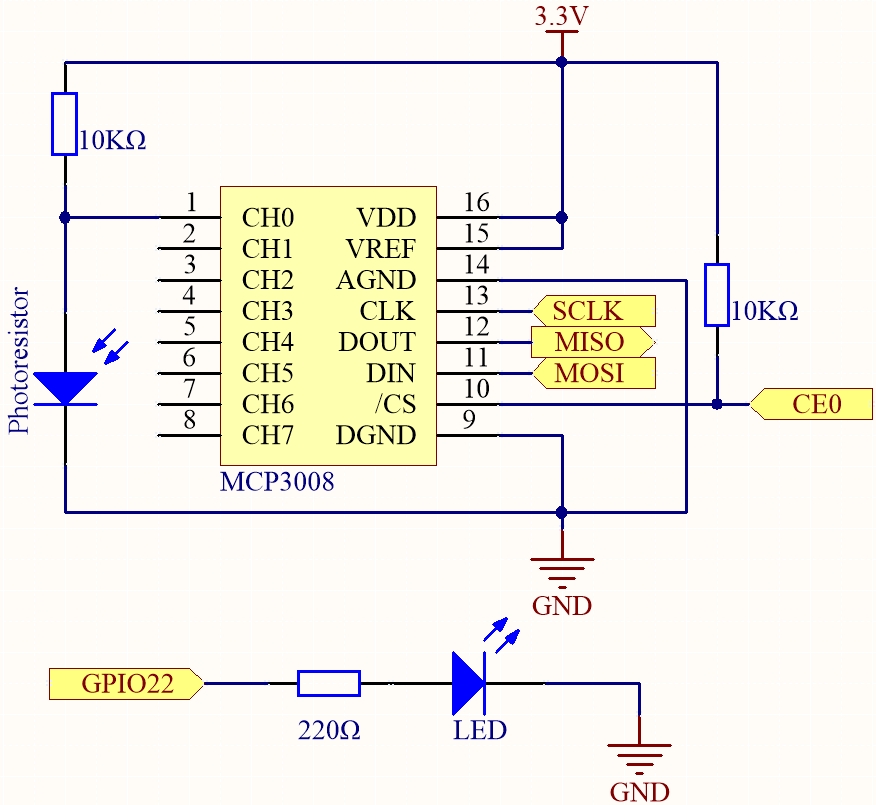
Schaltplan
T-Board-Name |
Physisch |
WiringPi |
BCM |
|---|---|---|---|
SPICE0 |
pin24 |
10 |
8 |
SPIMOSI |
pin19 |
12 |
10 |
SPIMISO |
pin21 |
13 |
9 |
SPISCLK |
pin23 |
14 |
11 |
GPIO22 |
pin15 |
3 |
22 |
Experimentelle Schritte
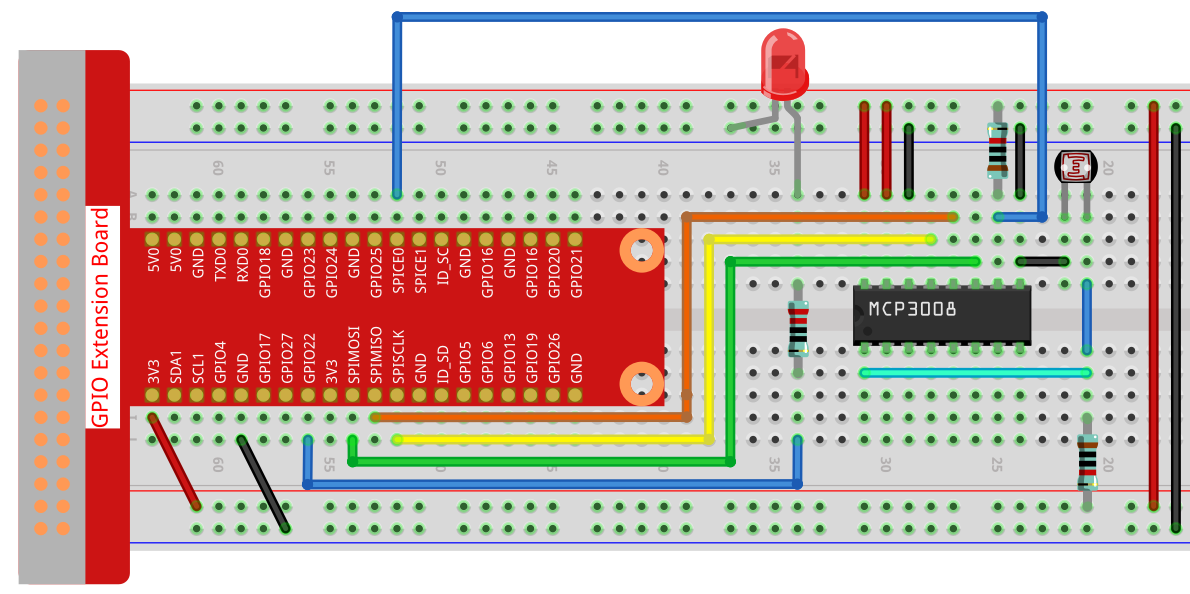
Schritt 1: Baue die Schaltung auf.
Für C-Sprach-Nutzer
Schritt 2: Wechsle in den Quellcode-Ordner.
cd ~/davinci-kit-for-raspberry-pi/c/2.2.1-2/
Schritt 3: Kompiliere den Code.
gcc 2.2.1_Photoresistor.c -o photoresistor -lwiringPi -lm
Schritt 4: Führe die ausführbare Datei aus.
./photoresistor
Während der Code läuft, ändert sich die Helligkeit der LED entsprechend der vom Fotowiderstand erfassten Lichtintensität.
Bemerkung
Falls es nach dem Start nicht funktioniert oder die Fehlermeldung „wiringPi.h: No such file or directory“ erscheint, siehe Installieren und Überprüfen von WiringPi.
Code
#include <wiringPi.h>
#include <wiringPiSPI.h>
#include <stdio.h>
#include <softPwm.h>
#define SPI_CHANNEL 0 // Verwende SPI-Kanal 0 (CE0)
#define SPI_SPEED 1000000 // 1 MHz SPI-Geschwindigkeit
#define LedPin 3 // GPIO3 (WiringPi) für LED-PWM
// ADC-Wert vom MCP3008 lesen, Kanal 0–7
int readMCP3008(int channel) {
if (channel < 0 || channel > 7) return -1;
unsigned char buffer[3];
buffer[0] = 1; // Start-Bit
buffer[1] = (8 + channel) << 4; // SGL/DIF = 1, D2-D0 = Kanal
buffer[2] = 0;
wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3);
// Ergebnis kombinieren
int result = ((buffer[1] & 3) << 8) | buffer[2];
return result;
}
int main(void) {
if (wiringPiSetup() == -1) {
printf("wiringPi init fehlgeschlagen!\n");
return 1;
}
if (wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) {
printf("SPI-Setup fehlgeschlagen!\n");
return 1;
}
softPwmCreate(LedPin, 0, 100); // Software-PWM initialisieren
while (1) {
int analogVal = readMCP3008(0); // Lese von CH0
printf("ADC-Wert: %d\n", analogVal);
// 10-Bit-ADC-Wert (0–1023) auf PWM-Bereich (0–100) skalieren
int pwmVal = analogVal * 100 / 1023;
softPwmWrite(LedPin, pwmVal);
delay(100);
}
return 0;
}
Code-Erklärung
Der Code ist derselbe wie in Abschnitt 2.1.4 Potentiometer. Bei Fragen siehe bitte die Code-Erklärung unter 2.1.4 Potentiometer (MCP3008).
Für Python-Sprach-Nutzer
Schritt 2: Richte das SPI-Interface ein und installiere die spidev-Bibliothek (siehe SPI-Konfiguration für Details). Falls du diese Schritte bereits ausgeführt hast, kannst du sie überspringen.
Schritt 3: Wechsle in den Quellcode-Ordner.
cd ~/davinci-kit-for-raspberry-pi/python
Schritt 4: Führe die Datei aus.
sudo python3 2.2.1-2_photoresistor.py
Während der Code läuft, ändert sich die Helligkeit der LED entsprechend der vom Fotowiderstand erfassten Lichtintensität.
Warnung
Falls die Fehlermeldung RuntimeError: Cannot determine SOC peripheral base address erscheint, siehe Wenn gpiozero nicht funktioniert..
Code
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import spidev
import time
# GPIO-Pin für PWM-LED
PWM_PIN = 22
# GPIO einrichten
GPIO.setmode(GPIO.BCM)
GPIO.setup(PWM_PIN, GPIO.OUT)
# PWM initialisieren (Frequenz = 1000Hz)
pwm = GPIO.PWM(PWM_PIN, 1000)
pwm.start(0) # Start mit 0% Tastverhältnis
# SPI initialisieren (MCP3008 auf Bus 0, CE0)
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000 # 1 MHz
# Funktion zum Lesen des MCP3008-ADC-Werts
def read_adc(channel):
"""
Liest analogen Wert vom MCP3008 (Kanal 0–7)
Rückgabe: 10-Bit-Wert (0–1023)
"""
if channel < 0 or channel > 7:
return -1
r = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((r[1] & 3) << 8) | r[2]
return value
# Hauptschleife: ADC lesen und PWM-Helligkeit setzen
try:
while True:
analogVal = read_adc(0)
print(f"Wert = {analogVal}")
# ADC-Wert (0–1023) auf Tastverhältnis (0–100) skalieren
duty_cycle = analogVal * 100 / 1023
pwm.ChangeDutyCycle(duty_cycle)
time.sleep(0.2)
except KeyboardInterrupt:
pass
finally:
pwm.stop()
GPIO.cleanup()
spi.close()
Code-Erklärung
Importieren der benötigten Bibliotheken:
RPi.GPIOzur Steuerung der GPIO-Pins und zur PWM-Erzeugung.spidevzur Kommunikation mit dem MCP3008 über SPI.timezur Steuerung von Wartezeiten.
#!/usr/bin/env python3 import RPi.GPIO as GPIO import spidev import time
Konfiguration von GPIO-Pin 22 als PWM-Ausgang im BCM-Modus. Initialisierung der Software-PWM bei 1000 Hz mit einem Start-Tastverhältnis von 0%.
# GPIO pin for PWM LED PWM_PIN = 22 # Setup GPIO GPIO.setmode(GPIO.BCM) GPIO.setup(PWM_PIN, GPIO.OUT) # Initialize PWM (frequency = 1000Hz) pwm = GPIO.PWM(PWM_PIN, 1000) pwm.start(0) # Start with 0% duty cycle
Einrichtung der SPI-Schnittstelle zum MCP3008 über Bus 0, CE0, mit einer Geschwindigkeit von 1 MHz.
# Initialize SPI (MCP3008 on Bus 0, CE0) spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000 # 1 MHz
Definition der Funktion
read_adc(channel), die den ADC-Wert (0–1023) von einem angegebenen Kanal liest, indem drei Bytes gesendet und die Antwort dekodiert werden.# Function to read MCP3008 ADC value def read_adc(channel): """ Read analog value from MCP3008 (channel 0–7) Returns: 10-bit value (0–1023) """ if channel < 0 or channel > 7: return -1 r = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((r[1] & 3) << 8) | r[2] return value
Hauptschleife:
Liest den analogen Eingang von Kanal 0.
Wandelt den Wert in ein PWM-Tastverhältnis (0–100%) um.
Steuert damit die LED-Helligkeit.
Wiederholt sich alle 0,2 Sekunden.
# Main loop to read ADC and set PWM brightness try: while True: analogVal = read_adc(0) print(f"value = {analogVal}") # Scale ADC value (0–1023) to duty cycle (0–100) duty_cycle = analogVal * 100 / 1023 pwm.ChangeDutyCycle(duty_cycle) time.sleep(0.2)
Bei Abbruch mit Strg+C werden PWM und GPIO korrekt gestoppt und die SPI-Verbindung geschlossen.
except KeyboardInterrupt: pass finally: pwm.stop() GPIO.cleanup() spi.close()