注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[こちら]をクリックして今すぐ参加しましょう!
SF006PRO Servo

このサーボは、小型で信頼性の高いアクチュエータであり、動作電圧 4~6 V で動作し、最大 180° の制御範囲で滑らかな動作を実現します。適度なトルク、高速な応答性、低消費電力を備えているため、ロボット工学、機械構造、一般的なホビープロジェクトに最適です。 標準的な 3 ピン PWM インターフェースを備えているため、Arduino や Raspberry Pi などのマイクロコントローラーと簡単に接続できます。
サーボの動作原理
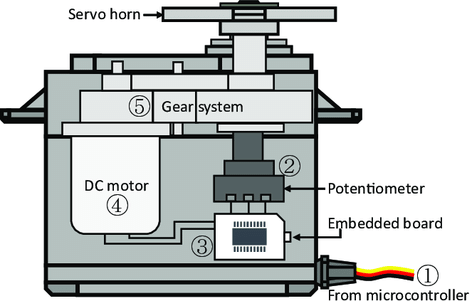
一般的なサーボは、以下の内部コンポーネントで構成されています。
ケース
出力シャフト
ギアシステム
ポテンショメータ
DCモーター
制御基板(内蔵電子回路)
マイクロコントローラーは、信号ピンを通して PWM 制御信号をサーボに送信します。 制御基板はこの信号を解釈し、DCモーターを駆動してギアシステムを回転させます。ギアによる減速機構により、回転運動はトルクを増幅して出力シャフトへ伝達されます。
出力シャフトはポテンショメータと機械的に接続されています。シャフトが回転すると、ポテンショメータから出力される電圧が変化します。制御基板はこのフィードバックを読み取り現在位置を判断し、目標位置に到達して保持されるまでモーターの動作を調整します。
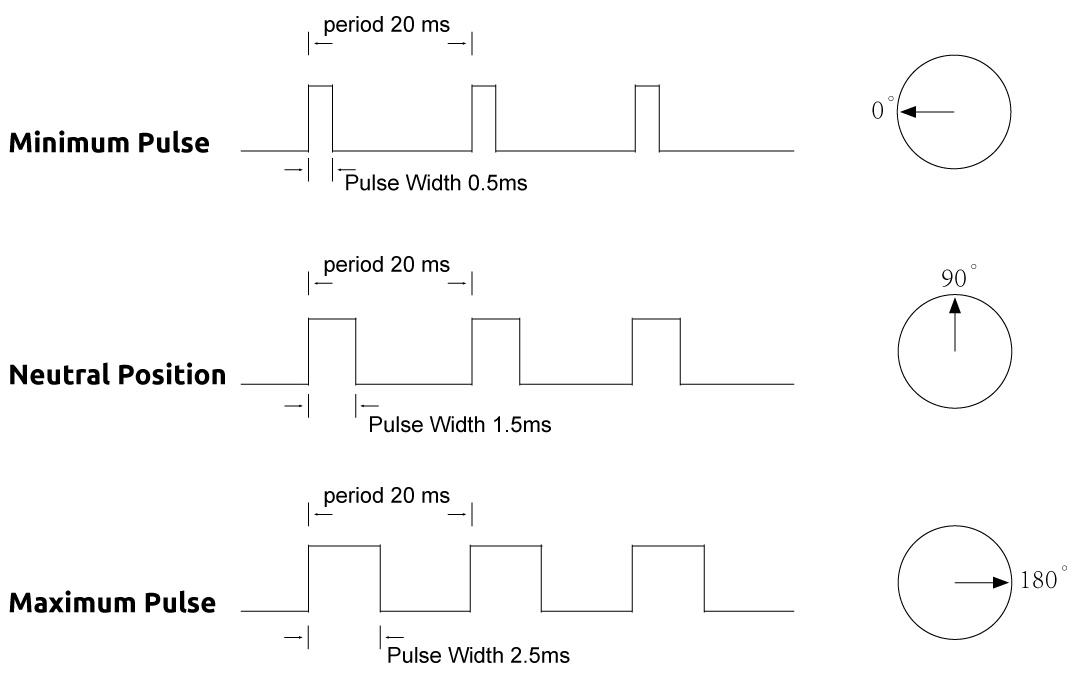
PWM制御
サーボの回転角度は、PWM信号のパルス幅によって決まります。通常、サーボは 20 ms ごとに制御パルスを受信します。
一般的なパルスの動作:
1.5 ms → 中立位置(約 90°)
< 1.5 ms → 中央位置から反時計回りに回転
> 1.5 ms → 中央位置から時計回りに回転
多くのホビー用サーボは 0.5 ms ~ 2.5 ms のパルス幅を受け入れ、この範囲がサーボの全可動域に対応します。
パラメータ
パラメータ |
仕様 |
|---|---|
動作電圧 |
DC 4V–6V(定格電圧 5V、5V 電源の使用を推奨) |
待機電流 |
≤ 5 mA |
無負荷電流 |
≤ 350 mA(5V、手動測定によるピーク値) |
ストール電流 |
≤ 1.2 A(5V、5 秒間のロック後は ≤250 mA に低下) |
定格トルク |
0.75 kgf·cm(5V) |
最大動的負荷 |
≥ 2.2 kgf·cm(5V) |
ストールトルク(静的) |
≥ 5 kgf·cm(トルク測定器でテスト) |
無負荷速度 |
≤ 0.17 s/60°(5V) |
動作回転角 |
90° ±10°(1000–2000 μs) |
最大回転角 |
180° ±10°(500–2500 μs) |
機械的限界角度 |
360° |
パルス幅範囲 |
500 μs ~ 2500 μs |
中立位置 |
1500 μs |
デッドバンド幅 |
≤ 6 μs |
バックラッシュ |
≤ 0.5° |
重量 |
13.5 ± 0.5 g |
ギア材質 |
プラスチック + 金属(ハイブリッドギア) |
モータータイプ |
鉄芯モーター |
ポテンショメータタイプ |
カーボン皮膜、回転角 220°、≥100,000 サイクル |
ケーブル |
250 ±5 mm、3-Pin JR コネクタ(ブラウン–レッド–オレンジ) |
接続ピン配置 |
オレンジ: PWM 信号 赤: VCC ブラウン: GND |
通信インターフェース |
PWM 信号電圧: HIGH 2.0–5.0V / LOW 0.0–0.6V フレームレート: 3–30 ms(標準 20 ms) パルス範囲: 500–2500 μs |
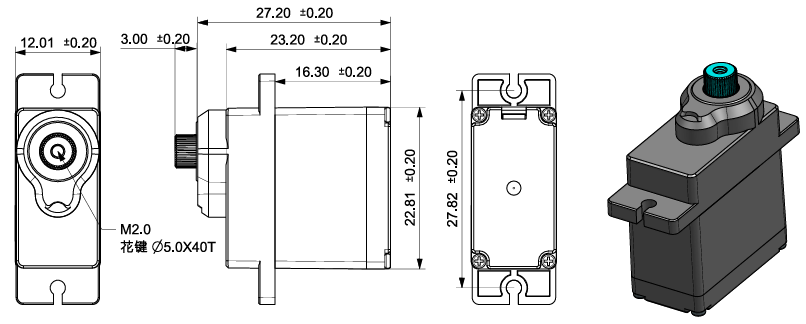
外形寸法