Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Peeks.
Sonderrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [here] und treten Sie noch heute bei!
9. Verfolgung roter Objekte mit Pan-Tilt-Kamera
Die Kombination aus Objektverfolgung und mechanischer Steuerung bildet die Grundlage vieler Anwendungen in Robotik und Computer Vision. In diesem Kapitel erstellen wir ein System, das rote Objekte in Echtzeit erkennt und Pan-Tilt-Servos steuert, um das Objekt in der Kameransicht zentriert zu halten.
Dies erweitert die grundlegende Farberkennung zu einem aktiven Tracking-System, das bewegte Objekte autonom verfolgen kann.
1. Ziel und Vorgehensweise
Verwenden von Picamera2, um Videoframes in Echtzeit aufzunehmen
Erkennen roter Objekte mit HSV-Farbraum und morphologischer Filterung
Implementieren eines einfachen 4-Richtungs-Tracking-Algorithmus basierend auf der Objektposition
Steuern von Pan- und Tilt-Servos, um das Objekt zentriert zu halten
Anzeigen von Echtzeit-Debug-Informationen und Tracking-Status
Bereitstellen von anpassbaren Parametern zur Feinabstimmung des Tracking-Verhaltens
2. Code ausführen
Wichtig
Stellen Sie vor dem Start sicher, dass:
das Pan-Tilt-Modul montiert ist
Sie Zugriff auf den Raspberry-Pi-Desktop haben
das Codepaket installiert ist
das Fusion HAT+ installiert und konfiguriert ist
OpenCV installiert ist
Detaillierte Anweisungen finden Sie unter 0. OpenCV einrichten.
Öffnen Sie das Terminal und geben Sie den folgenden Befehl ein:
cd ~/ai-lab-kit/opencv_python python3 cv_9_track_color.py
3. Ausführungsergebnis
Bei erfolgreicher Ausführung sollten Sie Folgendes sehen:
1. OpenCV-Fenster:
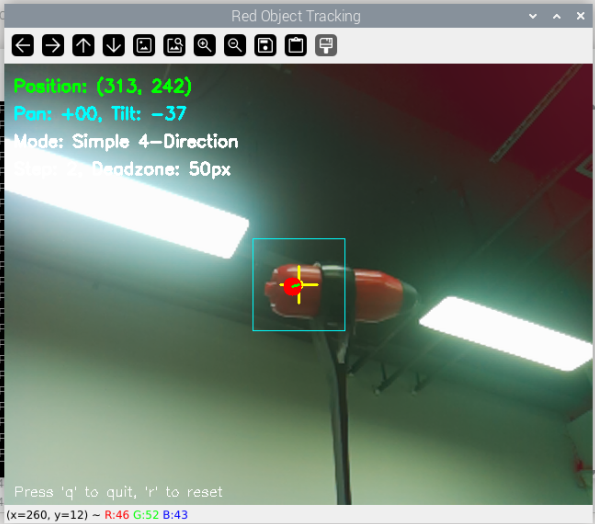
„Red Object Tracking“: Zeigt das Kamerabild mit Tracking-Overlay
2. Visuelle Elemente im Tracking-Fenster:
Gelbes Fadenkreuz in der Bildmitte
Blaues Rechteck, das die Deadzone (Bewegungsverbotszone) zeigt
Roter Kreis zur Markierung des erkannten Objektzentrums
Grüne Linie, die das Objekt mit der Bildmitte verbindet
Echtzeit-Informations-Overlay:
Objektpositionskoordinaten
Aktuelle Servo-Winkel
Tracking-Modus (Simple 4-Direction)
Bewegungsschritt- und Deadzone-Einstellungen
3. Konsolenausgabe:
FPS (Bilder pro Sekunde)
Aktuelle Servo-Positionen
Status der Objekterkennung
Anpassungen der Bewegungsschritte
4. Servo-Verhalten:
Die Servos bewegen sich in festen Schritten, um rote Objekte zentriert zu halten
Keine Bewegung, wenn sich das Objekt innerhalb der Deadzone befindet
Die Servos kehren in die Mittelposition zurück, wenn die Taste ‚r‘ gedrückt wird
Steuerung:
Drücken Sie ‚q‘, um das Programm zu beenden
Drücken Sie ‚r‘, um die Servos auf die Mittelposition zurückzusetzen
Drücken Sie ‚+‘, um die Bewegungsgeschwindigkeit zu erhöhen
Drücken Sie ‚-‘, um die Bewegungsgeschwindigkeit zu verringern
4. Vollständiger Code
Unten finden Sie das vollständige Python-Programm zur Verfolgung roter Objekte:
#!/usr/bin/env python3
"""
Red Object Tracking with Pan-Tilt Camera
"""
import cv2
import numpy as np
import time
from fusion_hat.servo import Servo
from picamera2 import Picamera2
# ========== SERVO SETTINGS ==========
# Servo channels
PAN_CHANNEL = 2 # Horizontal servo
TILT_CHANNEL = 3 # Vertical servo
# Servo angle limits (adjust according to your hardware)
PAN_MIN = -90 # Maximum left rotation
PAN_MAX = 90 # Maximum right rotation
TILT_MIN = -45 # Maximum down rotation
TILT_MAX = 45 # Maximum up rotation
# Initial position (center)
PAN_CENTER = 0
TILT_CENTER = 0
# ========== CAMERA SETTINGS ==========
FRAME_WIDTH = 640
FRAME_HEIGHT = 480
CENTER_X = FRAME_WIDTH // 2
CENTER_Y = FRAME_HEIGHT // 2
# ========== COLOR DETECTION SETTINGS ==========
# Red color range in HSV (two ranges for red)
LOWER_RED1 = np.array([0, 100, 80]) # Lower range for red
UPPER_RED1 = np.array([10, 255, 255]) # Upper range for red
LOWER_RED2 = np.array([170, 100, 80]) # Lower range for red (wrap-around)
UPPER_RED2 = np.array([180, 255, 255]) # Upper range for red (wrap-around)
# Morphology kernel for noise removal
KERNEL = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))
# Minimum contour area to consider (adjust based on object size)
MIN_CONTOUR_AREA = 500
# ========== TRACKING SETTINGS ==========
# Deadzone around center (pixels) - no movement inside this zone
DEADZONE_X = 50 # Horizontal deadzone
DEADZONE_Y = 50 # Vertical deadzone
# Movement step size in degrees (how much to move each frame)
MOVE_STEP = 2 # Degrees to move per adjustment
# ========== INITIALIZE HARDWARE ==========
print("Initializing Red Object Tracking System...")
# Initialize servos
print("Setting up servos...")
pan_servo = Servo(PAN_CHANNEL)
tilt_servo = Servo(TILT_CHANNEL)
# Center the servos initially
print("Centering servos...")
pan_servo.angle(PAN_CENTER)
tilt_servo.angle(TILT_CENTER)
time.sleep(1) # Wait for servos to move to center
# Current servo positions
current_pan = PAN_CENTER
current_tilt = TILT_CENTER
# Initialize camera
print("Setting up camera...")
picam2 = Picamera2()
# Configure camera for OpenCV
config = picam2.create_preview_configuration(
main={"size": (FRAME_WIDTH, FRAME_HEIGHT), "format": "XRGB8888"}
)
picam2.configure(config)
picam2.start()
print("Camera started. Looking for red objects...")
print("Press 'q' to quit the program")
print("-" * 50)
def simple_tracking(x, y):
"""
Simple 4-direction tracking algorithm
Args:
x: Object x-coordinate (None if not found)
y: Object y-coordinate (None if not found)
Returns:
pan_move, tilt_move: Degrees to move each servo (+/-)
"""
# If no object detected, don't move
if x is None or y is None:
return 0, 0
pan_move = 0
tilt_move = 0
# Check if object is left of center (outside deadzone)
if x < CENTER_X - DEADZONE_X:
# Object is left, move camera right (positive pan)
pan_move = MOVE_STEP
# Check if object is right of center (outside deadzone)
elif x > CENTER_X + DEADZONE_X:
# Object is right, move camera left (negative pan)
pan_move = -MOVE_STEP
# Check if object is above center (outside deadzone)
if y < CENTER_Y - DEADZONE_Y:
# Object is up, move camera down (negative tilt)
tilt_move = -MOVE_STEP
# Check if object is below center (outside deadzone)
elif y > CENTER_Y + DEADZONE_Y:
# Object is down, move camera up (positive tilt)
tilt_move = MOVE_STEP
return pan_move, tilt_move
def update_servo_position(pan_move, tilt_move):
"""
Update servo positions with limits checking
Args:
pan_move: Degrees to move pan servo (+/-)
tilt_move: Degrees to move tilt servo (+/-)
Returns:
current_pan, current_tilt: New servo positions
"""
global current_pan, current_tilt
# Calculate new positions
new_pan = current_pan + pan_move
new_tilt = current_tilt + tilt_move
# Apply angle limits to prevent hardware damage
new_pan = max(min(new_pan, PAN_MAX), PAN_MIN)
new_tilt = max(min(new_tilt, TILT_MAX), TILT_MIN)
# Move servos only if position changed
if new_pan != current_pan:
pan_servo.angle(new_pan)
current_pan = new_pan
if new_tilt != current_tilt:
tilt_servo.angle(new_tilt)
current_tilt = new_tilt
return current_pan, current_tilt
def find_red_object(frame):
"""
Detect red object in frame using HSV color space
Args:
frame: Input BGR image frame
Returns:
center_x, center_y: Coordinates of largest red object, or (None, None)
mask: Binary mask showing detected red areas
"""
# Convert BGR to HSV color space (better for color detection)
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# Create masks for red color (red wraps around 0 in HSV)
mask1 = cv2.inRange(hsv, LOWER_RED1, UPPER_RED1) # Lower red range
mask2 = cv2.inRange(hsv, LOWER_RED2, UPPER_RED2) # Upper red range
mask = cv2.bitwise_or(mask1, mask2) # Combine both ranges
# Apply morphological operations to clean up noise
mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, KERNEL, iterations=1)
mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, KERNEL, iterations=2)
# Find contours in the mask
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# Return if no contours found
if not contours:
return None, None, mask
# Find the largest contour (assume it's our target)
largest_contour = max(contours, key=cv2.contourArea)
area = cv2.contourArea(largest_contour)
# Filter by minimum area to ignore small noise
if area < MIN_CONTOUR_AREA:
return None, None, mask
# Calculate center of the contour using image moments
M = cv2.moments(largest_contour)
if M["m00"] == 0: # Prevent division by zero
return None, None, mask
center_x = int(M["m10"] / M["m00"])
center_y = int(M["m01"] / M["m00"])
return center_x, center_y, mask
def draw_debug_info(frame, object_x, object_y, mask, pan_angle, tilt_angle):
"""
Draw debugging information on the frame for visualization
Args:
frame: Frame to draw on
object_x, object_y: Object coordinates
mask: Detection mask
pan_angle, tilt_angle: Current servo angles
Returns:
frame: Frame with debug drawings
"""
# Draw center crosshair
cv2.line(frame, (CENTER_X - 20, CENTER_Y), (CENTER_X + 20, CENTER_Y), (0, 255, 255), 2)
cv2.line(frame, (CENTER_X, CENTER_Y - 20), (CENTER_X, CENTER_Y + 20), (0, 255, 255), 2)
cv2.circle(frame, (CENTER_X, CENTER_Y), 5, (0, 255, 255), -1)
# Draw deadzone rectangle
cv2.rectangle(frame,
(CENTER_X - DEADZONE_X, CENTER_Y - DEADZONE_Y),
(CENTER_X + DEADZONE_X, CENTER_Y + DEADZONE_Y),
(255, 255, 0), 1)
# Draw object center if detected
if object_x is not None and object_y is not None:
cv2.circle(frame, (object_x, object_y), 10, (0, 0, 255), -1)
cv2.line(frame, (CENTER_X, CENTER_Y), (object_x, object_y), (0, 255, 0), 2)
# Display position information
pos_text = f"Position: ({object_x}, {object_y})"
cv2.putText(frame, pos_text, (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (0, 255, 0), 2)
# Display servo angles
angle_text = f"Pan: {pan_angle:+03.0f}, Tilt: {tilt_angle:+03.0f}"
cv2.putText(frame, angle_text, (10, 60),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 255, 0), 2)
# Display tracking mode
cv2.putText(frame, "Mode: Simple 4-Direction", (10, 90),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 255, 255), 2)
# Display movement step
step_text = f"Step: {MOVE_STEP}, Deadzone: {DEADZONE_X}px"
cv2.putText(frame, step_text, (10, 120),
cv2.FONT_HERSHEY_SIMPLEX, 0.6, (255, 255, 255), 2)
# Draw quit instruction
cv2.putText(frame, "Press 'q' to quit, 'r' to reset", (10, FRAME_HEIGHT - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 1)
return frame
def cleanup():
"""
Clean up resources before exiting
"""
print("\nCleaning up...")
# Center servos before stopping
print("Centering servos...")
pan_servo.angle(PAN_CENTER)
tilt_servo.angle(TILT_CENTER)
time.sleep(0.5)
# Stop camera
print("Stopping camera...")
picam2.stop()
# Close OpenCV windows
cv2.destroyAllWindows()
print("System shutdown complete.")
# ========== MAIN LOOP ==========
def main():
"""
Main tracking loop
"""
frame_count = 0
start_time = time.time()
global MOVE_STEP
global current_pan, current_tilt
try:
while True:
# Capture frame from camera
frame_bgra = picam2.capture_array()
frame_bgr = cv2.cvtColor(frame_bgra, cv2.COLOR_BGRA2BGR)
# Find red object in frame
obj_x, obj_y, mask = find_red_object(frame_bgr)
# Use simple tracking algorithm to determine movement
pan_move, tilt_move = simple_tracking(obj_x, obj_y)
# Update servo positions
pan_angle, tilt_angle = update_servo_position(pan_move, tilt_move)
# Draw debugging information
frame_display = draw_debug_info(frame_bgr, obj_x, obj_y, mask, pan_angle, tilt_angle)
# Display frames
cv2.imshow("Red Object Tracking", frame_display)
# Calculate and display FPS every 30 frames
frame_count += 1
if frame_count % 30 == 0:
elapsed_time = time.time() - start_time
fps = frame_count / elapsed_time
print(f"FPS: {fps:.1f} | Pan: {pan_angle:+03.0f}° | Tilt: {tilt_angle:+03.0f}° | "
f"Object: {'Found' if obj_x else 'Not found'}")
# Check for user input
key = cv2.waitKey(1) & 0xFF
if key == ord('q'):
print("\nQuit command received.")
break
elif key == ord('r'):
# Reset to center position
print("Resetting to center...")
pan_servo.angle(PAN_CENTER)
tilt_servo.angle(TILT_CENTER)
current_pan = PAN_CENTER
current_tilt = TILT_CENTER
time.sleep(0.5)
elif key == ord('+'):
# Increase movement speed
MOVE_STEP = min(MOVE_STEP + 0.5, 5)
print(f"Movement step increased to {MOVE_STEP}°")
elif key == ord('-'):
# Decrease movement speed
MOVE_STEP = max(MOVE_STEP - 0.5, 0.5)
print(f"Movement step decreased to {MOVE_STEP}°")
except KeyboardInterrupt:
print("\nProgram interrupted.")
finally:
cleanup()
# ========== PROGRAM START ==========
if __name__ == "__main__":
print("=" * 60)
print("RED OBJECT TRACKING WITH PAN-TILT CAMERA")
print("=" * 60)
print("System will:")
print("1. Detect red objects using OpenCV")
print("2. Move servos in 4 directions to keep object centered")
print("3. Display tracking information")
print("\nControls:")
print(" Press 'q' to quit")
print(" Press 'r' to reset servos to center")
print(" Press '+' to increase movement speed")
print(" Press '-' to decrease movement speed")
print("\nTracking Logic:")
print(f" Deadzone: {DEADZONE_X}px around center (no movement)")
print(f" Movement: {MOVE_STEP}° per adjustment")
print(" Left object → Move right (+pan)")
print(" Right object → Move left (-pan)")
print(" Up object → Move down (-tilt)")
print(" Down object → Move up (+tilt)")
print("=" * 60)
main()
5. Code-Erklärung
simple_tracking(x, y)Diese Funktion entscheidet, wie sich die Servos basierend auf der erkannten Objektposition bewegen sollen.
Wenn kein Objekt erkannt wird (
xoderyistNone), gibt sie(0, 0)zurück (keine Bewegung).Wenn sich das Objekt außerhalb der Deadzone befindet, gibt sie einen kleinen Bewegungsschritt zurück:
Objekt links →
pan_move = +MOVE_STEPObjekt rechts →
pan_move = -MOVE_STEPObjekt oben →
tilt_move = -MOVE_STEPObjekt unten →
tilt_move = +MOVE_STEP
Die Deadzone verhindert, dass die Kamera zittert, wenn sich das Objekt bereits nahe der Bildmitte befindet.
update_servo_position(pan_move, tilt_move)Diese Funktion aktualisiert die Pan-/Tilt-Servo-Winkel auf sichere Weise.
Addiert den Bewegungsschritt zu den aktuellen Servo-Winkeln.
Begrenzung der Winkel auf sichere Bereiche (
PAN_MIN/PAN_MAXundTILT_MIN/TILT_MAX).Sendet Servo-Befehle nur dann, wenn sich der Winkel tatsächlich ändert.
Dadurch wird die Hardware vor Überrotation geschützt.
find_red_object(frame)Diese Funktion erkennt das größte rote Objekt im Kamerabild.
Hauptschritte:
Konvertiert das Bild von BGR in den HSV-Farbraum.
Erstellt eine binäre Maske für rote Pixel mithilfe zweier HSV-Bereiche.
Bereinigt die Maske mit morphologischen Operationen (OPEN + CLOSE).
Findet Konturen und wählt die größte aus.
Filtert kleine Regionen mithilfe von
MIN_CONTOUR_AREAheraus.Verwendet Bildmomente, um das Objektzentrum zu berechnen.
Rückgabewerte:
center_x, center_y: die Position des Objektzentrums (oderNone, None)mask: die binäre Maske, die rote Bereiche zeigt
draw_debug_info(frame, object_x, object_y, mask, pan_angle, tilt_angle)Diese Funktion zeichnet hilfreiche Tracking-Informationen in das Videobild, darunter:
Fadenkreuz in der Bildmitte
Deadzone-Rechteck
Erkannte Objektposition
Servo-Winkel (Pan und Tilt)
Tracking-Modus und Schrittgröße
Tastenhinweise
Dadurch lässt sich leicht erkennen, wie der Tracker arbeitet.
cleanup()Diese Funktion fährt das System vor dem Beenden sicher herunter.
Bewegt die Servos zurück in die Mittelposition.
Stoppt die Kamera.
Schließt alle OpenCV-Fenster.
Dadurch wird verhindert, dass die Kamera in einer ungewöhnlichen Position stehen bleibt.
main()Dies ist die Haupt-Tracking-Schleife.
Jede Iteration führt folgende Schritte aus:
Ein Kamerabild aufnehmen.
Das rote Objekt erkennen.
Entscheiden, wie sich die Servos bewegen sollen.
Servo-Winkel aktualisieren.
Debug-Informationen zeichnen.
Ergebnisfenster anzeigen.
Zusätzlich unterstützt das Programm Laufzeitsteuerungen:
qzum Beendenrzum Zurücksetzen der Servos+/-zum Anpassen der Tracking-Geschwindigkeit
Das Programm ruft im
finally-Block immercleanup()auf, um ein sicheres Herunterfahren zu gewährleisten.
6. Wichtige Parameter und Feinabstimmung
Parameter für die Farberkennung
# HSV thresholds for red detection LOWER_RED1 = np.array([0, 100, 80]) # [Hue, Saturation, Value] UPPER_RED1 = np.array([10, 255, 255]) LOWER_RED2 = np.array([170, 100, 80]) UPPER_RED2 = np.array([180, 255, 255]) # Minimum object size MIN_CONTOUR_AREA = 500
Tuning tips:
Adjust Hue values for different colors
Increase Saturation/Value minimums in bright environments
Adjust
MIN_CONTOUR_AREAbased on expected object size
Tracking-Parameter
# Größe der Deadzone (Pixel) DEADZONE_X = 50 # Größer = weniger Zittern, aber geringere Präzision DEADZONE_Y = 50 # Bewegungsschritt (Grad) MOVE_STEP = 2 # Größer = schnelleres Tracking, kann jedoch überschwingen
Tipps zur Feinabstimmung:
Beginnen Sie mit einer größeren Deadzone (50–100 px) für stabilen Betrieb
Passen Sie MOVE_STEP je nach Tracking-Anforderungen an (0.5–5°)
Verwenden Sie die Tasten ‚+‘ und ‚-‘, um die Geschwindigkeit während der Laufzeit anzupassen
Servo-Parameter
# Servo-Grenzen (für Ihre Hardware kalibrieren) PAN_MIN = -90 # Maximale Drehung nach links PAN_MAX = 90 # Maximale Drehung nach rechts TILT_MIN = -45 # Maximale Bewegung nach unten TILT_MAX = 45 # Maximale Bewegung nach oben
Bemerkung
Kalibrieren Sie diese Werte entsprechend Ihrer Hardware, um Schäden zu vermeiden.
7. Häufige Probleme und Fehlerbehebung
Servo bewegt sich nicht
Ursache: Objekt befindet sich innerhalb der Deadzone oder
MIN_CONTOUR_AREAist zu großLösung: Objektposition prüfen,
MIN_CONTOUR_AREAreduzieren oder Deadzone verkleinern
Servo bewegt sich zu langsam
Ursache:
MOVE_STEPist zu kleinLösung: Taste ‚+‘ drücken, um die Bewegungsgeschwindigkeit zu erhöhen
Servo bewegt sich ruckartig
Ursache:
MOVE_STEPist zu großLösung: Taste ‚-‘ drücken, um die Bewegungsgeschwindigkeit zu verringern
Falsche Objekterkennung
Ursache: HSV-Schwellenwerte zu breit oder Beleuchtungsprobleme
Lösung: HSV-Bereiche anpassen, Beleuchtung verbessern,
MIN_CONTOUR_AREAerhöhen
Niedrige FPS (unter 10 FPS)
Ursache: Überlastete Verarbeitung oder Kameraeinstellungen
Lösung: Bildauflösung reduzieren, Debug-Zeichnungen vereinfachen
8. Erweiterungen und fortgeschrittene Funktionen
Verfolgung mehrerer Objekte
# Statt nur die größte Kontur zu verwenden: for contour in contours: if cv2.contourArea(contour) > MIN_CONTOUR_AREA: # Mehrere Objekte verfolgen
Rückkehr zur proportionalen Regelung
# Proportionale Regelung erneut implementieren KP_PAN = 0.3 pan_move = -x_error * KP_PAN / CENTER_X
Geschwindigkeitsanpassung basierend auf Objektgröße
# Bewegungsgeschwindigkeit abhängig von der Objektgröße anpassen object_size = cv2.contourArea(largest_contour) if object_size > 1000: # Großes Objekt adjusted_step = MOVE_STEP * 0.5 # Langsamer bewegen else: # Kleines Objekt adjusted_step = MOVE_STEP * 1.5 # Schneller bewegen
Protokollierung und Datenaufzeichnung
# Tracking-Daten zur Analyse speichern with open('tracking_log.csv', 'a') as f: f.write(f"{time.time()},{obj_x},{obj_y},{pan_angle},{tilt_angle}\n")
Netzwerk-Streaming
# Video über das Netzwerk streamen import socket # Hier Netzwerk-Streaming-Code hinzufügen
9. Lernziele
Nach Abschluss dieses Projekts sollten Sie Folgendes verstehen:
Computer Vision: Echtzeit-Farberkennung und Objektverfolgung
Regelungstechnik: Implementierung eines einfachen 4-Richtungs-Tracking-Algorithmus
Hardware-Integration: Verbindung von Kamera und Servos mit dem Raspberry Pi
Interaktive Steuerung: Echtzeit-Anpassung von Parametern während des Betriebs
Systemdesign: Architektur eines vereinfachten Tracking-Systems
Dieses Projekt bildet eine Grundlage für fortgeschrittene Anwendungen wie Gesichtstracking, autonome Navigation und industrielle Automatisierungssysteme. Der vereinfachte 4-Richtungs-Ansatz erleichtert das Verständnis und die Anpassung für unterschiedliche Anwendungen.