Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Peeks.
Sonderrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [here] und treten Sie noch heute bei!
4. Farberkennung
Farberkennung ist eine der grundlegendsten und zugleich praktischsten Funktionen der Computer Vision. In diesem Kapitel verwenden wir schrittweise erklärten Code, um rote Objekte im HSV-Farbraum zu erkennen und Begrenzungsrahmen um diese zu zeichnen.
Dies bildet die Grundlage für weiterführende Objektverfolgungstechniken (z. B. CAMShift).
1. Ziel und Vorgehensweise
Verwenden von Picamera2, um Kameraframes in Echtzeit aufzunehmen
Umwandeln des Bildes vom BGR- in den HSV-Farbraum
Verwenden von
cv2.inRange, um rote Bereiche zu extrahierenVerwenden morphologischer Filter, um Rauschen zu entfernen
Verwenden von
cv2.findContours, um die Konturen roter Objekte zu findenZeichnen von Begrenzungsrahmen um die erkannten roten Bereiche
2. Code ausführen
Wichtig
Stellen Sie vor dem Start sicher, dass:
das Pan-Tilt-Modul montiert ist
Sie Zugriff auf den Raspberry-Pi-Desktop haben
das Codepaket installiert ist
das Fusion HAT+ installiert und konfiguriert ist
OpenCV installiert ist
Detaillierte Anweisungen finden Sie unter 0. OpenCV einrichten.
Öffnen Sie das Terminal und geben Sie den folgenden Befehl ein:
cd ~/ai-lab-kit/opencv_python python3 cv_4_color.py
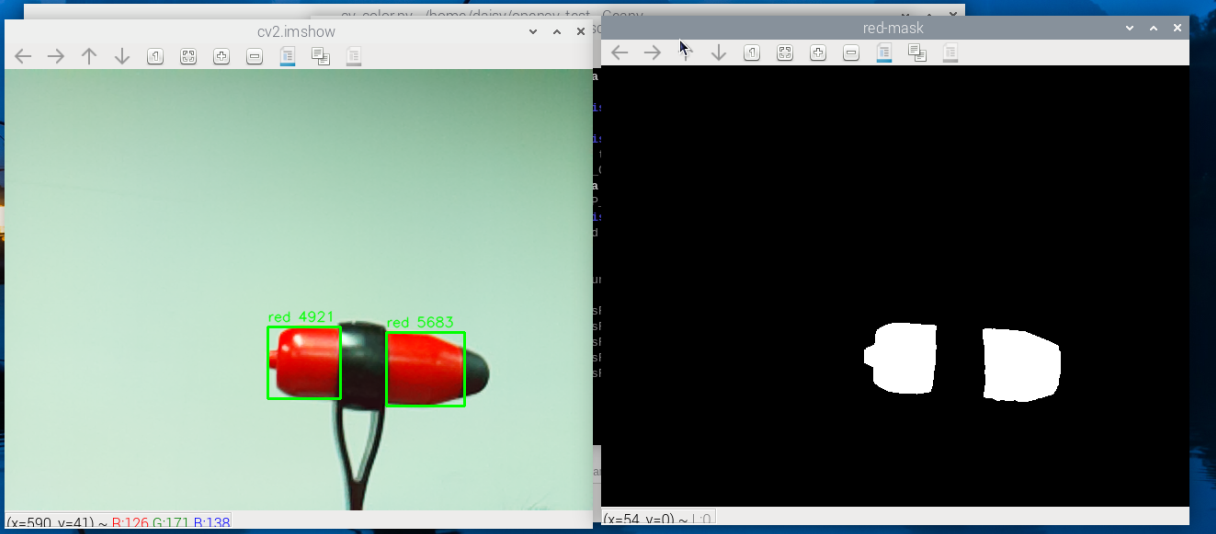
Wenn Sie das Programm ausführen, erscheinen zwei OpenCV-Fenster auf dem Bildschirm:
Red Detection – zeigt das Live-Kamerabild mit grünen Begrenzungsrahmen um erkannte rote Objekte
Red Mask – zeigt das binäre Maskenbild, das für die Farberkennung verwendet wird
Das Programm erfasst kontinuierlich Frames von der Raspberry-Pi-Kamera und erkennt rote Bereiche in Echtzeit. Wenn ein rotes Objekt erkannt wird, erscheinen auf dem Farbbild ein grünes Rechteck sowie der Flächenwert.
Sie können das Programm auf zwei Arten beenden:
Drücken Sie die q-Taste auf der Tastatur
Schließen Sie eines der OpenCV-Fenster über die Schaltfläche zum Schließen (X)
Nach dem Beenden stoppt die Kameraübertragung und alle OpenCV-Fenster werden geschlossen.
3. Vollständiger Code
from picamera2 import Picamera2
import cv2
import numpy as np
import time
# -----------------------------
# Camera setup
# -----------------------------
picam2 = Picamera2()
config = picam2.create_preview_configuration(
main={"size": (640, 480), "format": "XRGB8888"} # 4-channel format (BGRA-like)
)
picam2.configure(config)
picam2.start()
print("Streaming... press 'q' to quit")
# -----------------------------
# Red color range in HSV
# (Red wraps around 0/180 in HSV, so we use two ranges)
# -----------------------------
LOWER_RED1 = np.array([0, 100, 80], dtype=np.uint8)
UPPER_RED1 = np.array([10, 255, 255], dtype=np.uint8)
LOWER_RED2 = np.array([170, 100, 80], dtype=np.uint8)
UPPER_RED2 = np.array([180, 255, 255], dtype=np.uint8)
# Morphology settings
KERNEL = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))
MIN_AREA = 800 # ignore small blobs
# Window names
WIN_RESULT = "Red Detection"
WIN_MASK = "Red Mask"
# Optional: limit FPS to reduce CPU usage (set to None to disable)
TARGET_FPS = 30
FRAME_INTERVAL = 1.0 / TARGET_FPS if TARGET_FPS else 0
while True:
loop_start = time.perf_counter()
# Capture one frame (BGRA-like) and convert to BGR for OpenCV processing
frame_bgra = picam2.capture_array()
frame_bgr = cv2.cvtColor(frame_bgra, cv2.COLOR_BGRA2BGR)
# Convert BGR to HSV
hsv = cv2.cvtColor(frame_bgr, cv2.COLOR_BGR2HSV)
# Create red mask using two HSV ranges
mask1 = cv2.inRange(hsv, LOWER_RED1, UPPER_RED1)
mask2 = cv2.inRange(hsv, LOWER_RED2, UPPER_RED2)
mask = cv2.bitwise_or(mask1, mask2)
# Morphological operations: remove noise + fill holes
mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, KERNEL, iterations=1)
mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, KERNEL, iterations=2)
# Find contours in the mask
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# Draw bounding boxes for valid red regions
for cnt in contours:
area = cv2.contourArea(cnt)
if area < MIN_AREA:
continue
x, y, w, h = cv2.boundingRect(cnt)
cv2.rectangle(frame_bgr, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.putText(
frame_bgr,
f"red area={int(area)}",
(x, max(0, y - 6)),
cv2.FONT_HERSHEY_SIMPLEX,
0.5,
(0, 255, 0),
1,
cv2.LINE_AA
)
# Show both windows
cv2.imshow(WIN_RESULT, frame_bgr)
cv2.imshow(WIN_MASK, mask)
# Process GUI events + keyboard input
key = cv2.waitKey(1) & 0xFF
if key == ord("q"):
break
# Exit if the user closes any window (click X)
if (cv2.getWindowProperty(WIN_RESULT, cv2.WND_PROP_VISIBLE) < 1 or
cv2.getWindowProperty(WIN_MASK, cv2.WND_PROP_VISIBLE) < 1):
break
# Cleanup
picam2.stop()
cv2.destroyAllWindows()
4. Code-Erklärung
Picamera2 initialisieren und den Stream starten:
picam2 = Picamera2() config = picam2.create_preview_configuration( main={"size": (640, 480), "format": "XRGB8888"} ) picam2.configure(config) picam2.start()
Dadurch wird die Kamera auf 640×480 konfiguriert und der Vorschaustream gestartet.
XRGB8888ist ein 4-Kanal-Format, daher sind die aufgenommenen Frames BGRA-ähnlich.Das aufgenommene Frame in ein von OpenCV üblich verwendetes Format konvertieren:
frame_bgra = picam2.capture_array() frame_bgr = cv2.cvtColor(frame_bgra, cv2.COLOR_BGRA2BGR)
Picamera2 liefert hier ein 4-Kanal-Bild zurück, deshalb wandeln wir es zur Verarbeitung in das standardmäßige 3-Kanal-BGR-Format um.
Den HSV-Farbraum für robuste Farberkennung verwenden:
hsv = cv2.cvtColor(frame_bgr, cv2.COLOR_BGR2HSV)
HSV trennt Farbe (Hue) von Helligkeit, wodurch die Farberkennung bei unterschiedlichen Lichtverhältnissen stabiler wird.
Zwei HSV-Bereiche für Rot definieren:
mask1 = cv2.inRange(hsv, LOWER_RED1, UPPER_RED1) mask2 = cv2.inRange(hsv, LOWER_RED2, UPPER_RED2) mask = cv2.bitwise_or(mask1, mask2)
Rot „überlappt“ in der Hue-Skala von OpenCV-HSV (nahe 0 und nahe 180), daher werden zwei Bereiche kombiniert, um alle Rottöne abzudecken.
Die Maske mit Morphologie bereinigen (Rauschen reduzieren und Löcher füllen):
mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, KERNEL, iterations=1) mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, KERNEL, iterations=2)
OPEN entfernt kleine störende Punkte.
CLOSE füllt kleine Löcher innerhalb der erkannten roten Bereiche.
Rote Bereiche finden und kleine Fragmente herausfiltern:
contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) for cnt in contours: area = cv2.contourArea(cnt) if area < MIN_AREA: continue
Die Konturen werden aus der binären Maske erkannt.
MIN_AREAignoriert kleine rote Bereiche, um Fehldetektionen zu reduzieren.Begrenzungsrahmen und Beschriftungen in das Ergebnisbild zeichnen:
x, y, w, h = cv2.boundingRect(cnt) cv2.rectangle(frame_bgr, (x, y), (x + w, y + h), (0, 255, 0), 2) cv2.putText(frame_bgr, f"red area={int(area)}", ...)
Dadurch wird angezeigt, wo OpenCV rote Objekte gefunden hat, und die erkannte Flächengröße wird zur Referenz eingeblendet.
Sowohl das Ergebnis als auch die Maske anzeigen:
cv2.imshow(WIN_RESULT, frame_bgr) cv2.imshow(WIN_MASK, mask)
Das Ergebnisfenster zeigt das Kamerabild mit Rahmen, und das Maskenfenster zeigt das binäre Bild nur der roten Bereiche.
Abbruchbedingungen (Tastatur + Fensterschließen):
key = cv2.waitKey(1) & 0xFF if key == ord("q"): break if (cv2.getWindowProperty(WIN_RESULT, cv2.WND_PROP_VISIBLE) < 1 or cv2.getWindowProperty(WIN_MASK, cv2.WND_PROP_VISIBLE) < 1): break
Drücken Sie
q, um das Programm zu beenden, oder schließen Sie eines der Fenster für einen sicheren Abbruch.Aufräumen:
picam2.stop() cv2.destroyAllWindows()
Stoppen Sie immer die Kamera und schließen Sie die OpenCV-Fenster, um Ressourcen freizugeben.
5. Tipps zur Parameteranpassung
LOWER_RED1 / UPPER_RED1: Passen Sie diesen Bereich an, um andere Farben zu erkennen. Zum Beispiel Grün ≈[35, 50, 50]bis[85, 255, 255].KERNEL: Größere Kernel bewirken eine stärkere Filterung, können aber kleine Objekte entfernen.MIN_AREA: Ein höherer Wert filtert kleine störende Konturen heraus; ein niedrigerer Wert macht die Erkennung empfindlicher.
Bemerkung
Sie können zunächst nur die mask anzeigen und die Schwellenwerte so lange anpassen, bis der Zielbereich klar aussieht, und erst danach mit dem restlichen Ablauf fortfahren.
6. Erweiterungen und Übungen
Ändern Sie den HSV-Schwellenwert, um andere Farben zu erkennen (z. B. Blau oder Grün).
Experimentieren Sie mit unterschiedlichen morphologischen Parametern in komplexeren Hintergründen.