Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Peeks.
Sonderrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [here] und treten Sie noch heute bei!
8. Gesichts- und Augenerkennung
In diesem Kapitel verwenden wir die Raspberry-Pi-Kamera mit Picamera2, um Video aufzunehmen, und nutzen die Haar-Feature-Klassifikatoren von OpenCV für die Echtzeit-Erkennung von Gesichtern und Augen. Dieser Ansatz ist leichtgewichtig und sehr praktisch – ideal für Einsteigerprojekte auf dem Raspberry Pi.
1. Haar-Features und Erkennungsprinzip
Wesen der Haar-Features
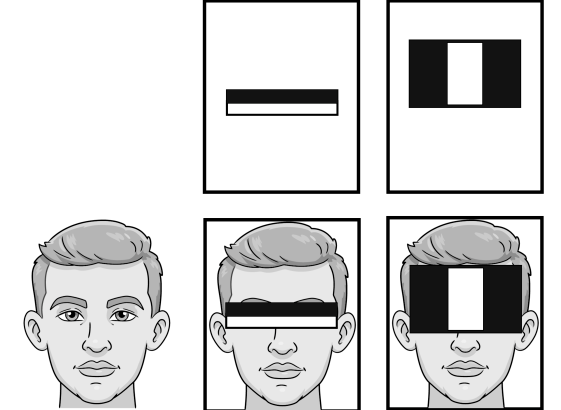
Haar-Features sind eine klassische Methode zur Objekterkennung. Sie kodieren Helligkeitsunterschiede innerhalb von Bildregionen, um zu bestimmen, ob eine Region wahrscheinlich ein Gesicht, Augen usw. enthält.
Typische Beispiele für Haar-Features:
Augenbereiche sind meist dunkler als die Stirn darüber
Die Helligkeit ist auf beiden Seiten des Nasenrückens symmetrisch
Der Bereich unter dem Mund zeigt häufig ein deutliches Kantenmuster
OpenCV benötigt vortrainierte Haar-Klassifikatoren (.xml-Dateien). Diese sind bereits im Beispielverzeichnis enthalten – Sie müssen sie nur laden und verwenden.
Erkennungspipeline
Laden des trainierten Haar-Modells mit
CascadeClassifierUmwandeln des Echtzeitvideos in Graustufen (für höhere Effizienz)
Verwenden von
detectMultiScalezur Erkennung von Gesichts- und AugenbereichenZeichnen von Rechtecken um die erkannten Zielobjekte
2. Code ausführen
Wichtig
Stellen Sie vor dem Start sicher, dass:
das Pan-Tilt-Modul montiert ist
Sie Zugriff auf den Raspberry-Pi-Desktop haben
das Codepaket installiert ist
das Fusion HAT+ installiert und konfiguriert ist
OpenCV installiert ist
Detaillierte Anweisungen finden Sie unter 0. OpenCV einrichten.
Öffnen Sie das Terminal und geben Sie den folgenden Befehl ein:
cd ~/ai-lab-kit/opencv_python python3 cv_8_haarcascade.py
Tipp
Zusätzlich stellen wir
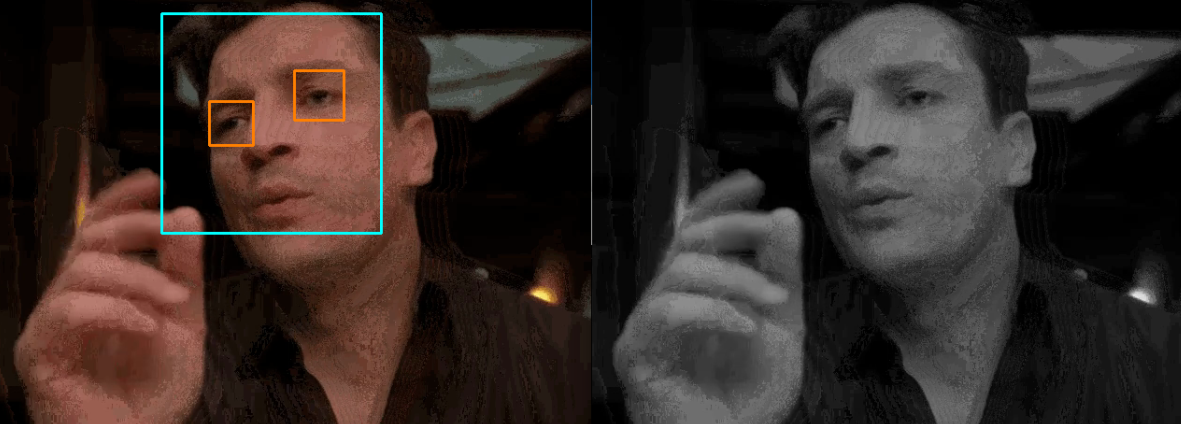
cv_8_haarcascade_video.pybereit, um Gesichter und Augen aus einer Videodatei zu erkennen.Wenn Sie das Programm ausführen, erscheint ein Fenster mit dem Namen Raspberry Pi Camera - Face Detection und zeigt das Live-Kamerabild der Raspberry-Pi-Kamera an.
Erkannte Gesichter im Videostream werden mit gelben Rechtecken markiert, und jedes erkannte Gesicht wird beschriftet (Face 1, Face 2, …). Innerhalb jeder erkannten Gesichtsregion erkennt das Programm außerdem Augen und markiert diese mit orangefarbenen Rechtecken.
Die Erkennung funktioniert in Echtzeit, und die Rechtecke bewegen sich mit, wenn sich eine Person vor der Kamera bewegt.
So beenden Sie das Programm:
Drücken Sie die q-Taste auf der Tastatur
Oder schließen Sie das Anzeigefenster über die Schaltfläche zum Schließen (X)
Nach dem Beenden stoppt die Kamera und alle OpenCV-Fenster werden geschlossen.
3. Vollständiger Code
# Face and eye detection using Raspberry Pi Camera (Picamera2 + OpenCV Haar Cascades)
import cv2
from picamera2 import Picamera2
from pathlib import Path
# -----------------------------
# Load Haar cascade classifiers
# -----------------------------
BASE_DIR = Path(__file__).resolve().parent
face_cascade = cv2.CascadeClassifier(str(BASE_DIR / "haarcascade_frontalface_default.xml"))
eye_cascade = cv2.CascadeClassifier(str(BASE_DIR / "haarcascade_eye.xml"))
# Check if cascade files are loaded correctly
if face_cascade.empty():
raise FileNotFoundError("Failed to load haarcascade_frontalface_default.xml")
if eye_cascade.empty():
raise FileNotFoundError("Failed to load haarcascade_eye.xml")
# -----------------------------
# Initialize Picamera2
# -----------------------------
picam2 = Picamera2()
# Video configuration (resolution can be adjusted)
config = picam2.create_video_configuration(main={"size": (640, 480)})
picam2.configure(config)
picam2.start()
WIN = "Raspberry Pi Camera - Face Detection"
print("Camera started. Press 'q' to quit.")
try:
while True:
# Capture a frame (Picamera2 typically provides RGB)
frame_rgb = picam2.capture_array()
# Convert RGB -> Grayscale directly (faster than RGB->BGR->GRAY)
gray = cv2.cvtColor(frame_rgb, cv2.COLOR_RGB2GRAY)
# Improve contrast to make detection more stable under different lighting
gray = cv2.equalizeHist(gray)
# Detect faces
faces = face_cascade.detectMultiScale(
gray,
scaleFactor=1.2,
minNeighbors=5,
minSize=(60, 60)
)
# Convert RGB -> BGR only for display and drawing (OpenCV imshow expects BGR)
frame_bgr = cv2.cvtColor(frame_rgb, cv2.COLOR_RGB2BGR)
# Draw face and eye results
for i, (x, y, w, h) in enumerate(faces, start=1):
# Draw face rectangle + label
cv2.rectangle(frame_bgr, (x, y), (x + w, y + h), (255, 255, 0), 2)
cv2.putText(frame_bgr, f"Face {i}", (x, max(0, y - 10)),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 0), 2)
# ROI for eye detection (search eyes only inside the detected face area)
roi_gray = gray[y:y + h, x:x + w]
roi_color = frame_bgr[y:y + h, x:x + w]
eyes = eye_cascade.detectMultiScale(
roi_gray,
scaleFactor=1.2,
minNeighbors=8,
minSize=(20, 20)
)
# Draw up to 2 eyes (typical for a face)
for (ex, ey, ew, eh) in eyes[:2]:
cv2.rectangle(roi_color, (ex, ey), (ex + ew, ey + eh), (0, 127, 255), 2)
# Show the frame
cv2.imshow(WIN, frame_bgr)
# Handle keyboard input
key = cv2.waitKey(1) & 0xFF
if key == ord("q"):
break
# Exit if the user closes the window (click X)
if cv2.getWindowProperty(WIN, cv2.WND_PROP_VISIBLE) < 1:
break
finally:
picam2.stop()
cv2.destroyAllWindows()
print("Camera stopped.")
4. Code-Erklärung
Erforderliche Bibliotheken importieren:
import cv2 from picamera2 import Picamera2 from pathlib import Path
OpenCV wird für die Erkennung und das Zeichnen verwendet, Picamera2 dient zum Erfassen von Frames von der Raspberry-Pi-Kamera.
Verzeichnis des aktuellen Skripts ermitteln:
BASE_DIR = Path(__file__).resolve().parent
Dadurch können die Cascade-XML-Dateien aus demselben Ordner wie das Python-Skript geladen werden.
Haar-Cascade-Klassifikatoren laden (Gesicht und Augen):
face_cascade = cv2.CascadeClassifier(str(BASE_DIR / "haarcascade_frontalface_default.xml")) eye_cascade = cv2.CascadeClassifier(str(BASE_DIR / "haarcascade_eye.xml"))
Haar-Cascades sind vortrainierte Modelle, die Gesichter und Augen erkennen können.
Prüfen, ob die Cascade-Dateien korrekt geladen wurden:
if face_cascade.empty(): raise FileNotFoundError("haarcascade_frontalface_default.xml konnte nicht geladen werden") if eye_cascade.empty(): raise FileNotFoundError("haarcascade_eye.xml konnte nicht geladen werden")
Wenn der Dateipfad falsch ist oder die Datei fehlt, ist
CascadeClassifierleer. Diese Prüfungen helfen, das Problem frühzeitig zu erkennen.Kamera initialisieren und Auflösung festlegen:
picam2 = Picamera2() config = picam2.create_video_configuration(main={"size": (640, 480)}) picam2.configure(config) picam2.start()
Dadurch wird die Kamera im Videomodus mit 640×480 gestartet.
Frames kontinuierlich erfassen:
frame_rgb = picam2.capture_array()
In jeder Schleife wird ein Frame erfasst. Picamera2 gibt Frames normalerweise im RGB-Format zurück.
In Graustufen umwandeln (schneller für die Erkennung):
gray = cv2.cvtColor(frame_rgb, cv2.COLOR_RGB2GRAY)
Die Gesichts-/Augenerkennung arbeitet mit Graustufenbildern und läuft schneller als mit Farbbildern.
Kontrast verbessern für stabilere Erkennung:
gray = cv2.equalizeHist(gray)
Histogrammangleichung kann die Erkennung unter unterschiedlichen Lichtbedingungen verbessern.
Gesichter im Frame erkennen:
faces = face_cascade.detectMultiScale( gray, scaleFactor=1.2, minNeighbors=5, minSize=(60, 60) )
Dies gibt eine Liste von Rechtecken
(x, y, w, h)für alle erkannten Gesichter zurück.scaleFactorsteuert die Skalierungsschritte des Bildes (kleiner = genauer, aber langsamer).minNeighborsreduziert Fehl-Erkennungen (höher = strenger).minSizeignoriert sehr kleine Erkennungen.
RGB in BGR konvertieren für Zeichnen und Anzeige:
frame_bgr = cv2.cvtColor(frame_rgb, cv2.COLOR_RGB2BGR)
Die Zeichenfunktionen von OpenCV und
imshowerwarten BGR für Farbbilder.Gesichtsrechtecke und Beschriftungen zeichnen:
cv2.rectangle(frame_bgr, (x, y), (x + w, y + h), (255, 255, 0), 2) cv2.putText(frame_bgr, f"Face {i}", (x, max(0, y - 10)), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 0), 2)
Dadurch wird um jedes erkannte Gesicht ein Rechteck gezeichnet und eine Beschriftung wie „Face 1“ hinzugefügt.
Augen innerhalb jedes Gesichts erkennen (ROI):
roi_gray = gray[y:y + h, x:x + w] roi_color = frame_bgr[y:y + h, x:x + w] eyes = eye_cascade.detectMultiScale( roi_gray, scaleFactor=1.2, minNeighbors=8, minSize=(20, 20) )
ROI bedeutet „Region of Interest“. Wenn Augen nur innerhalb des Gesichtsbereichs erkannt werden, ist das schneller und reduziert Fehl-Erkennungen.
Bis zu zwei Augen zeichnen:
for (ex, ey, ew, eh) in eyes[:2]: cv2.rectangle(roi_color, (ex, ey), (ex + ew, ey + eh), (0, 127, 255), 2)
Dadurch werden Rechtecke um die ersten zwei erkannten Augen gezeichnet.
Ergebnis anzeigen und Beenden behandeln:
cv2.imshow(WIN, frame_bgr) key = cv2.waitKey(1) & 0xFF if key == ord("q"): break if cv2.getWindowProperty(WIN, cv2.WND_PROP_VISIBLE) < 1: break
Drücken Sie
qzum Beenden oder schließen Sie das Fenster, um sicher zu beenden.Aufräumen (wird immer ausgeführt):
picam2.stop() cv2.destroyAllWindows()
Die Kamera wird gestoppt und alle OpenCV-Fenster werden geschlossen, auch wenn ein Fehler auftritt.
5. Vor- und Nachteile der Haar-Erkennung
Aspekt |
Vorteile |
Nachteile |
|---|---|---|
Geschwindigkeit |
Sehr schnell; geeignet für Raspberry Pi |
|
Genauigkeit |
Funktioniert gut bei frontalen Gesichtern |
Empfindlich gegenüber Rotation und Profilansichten |
Beleuchtung |
Gut bei gleichmäßiger Beleuchtung |
Leistung sinkt bei zu heller/dunkler Umgebung |
Modell |
Kleine Modellgröße; leicht zu deployen |
Weniger genau als Deep-Learning-Methoden |
Da Haar-Features leichtgewichtig und schnell sind, sind sie auf Embedded-Geräten weiterhin sehr praktisch.
6. Häufige Verbesserungen
Vorverarbeitung der Beleuchtung: Histogrammangleichung oder CLAHE vor der Erkennung anwenden, um die Leistung bei schwachem Licht zu verbessern.
Erkennung aus mehreren Winkeln: Sowohl Front- als auch Profil-Gesichtsklassifikatoren laden, um mehr Posen zu erkennen.
Mehr Gesichtsmerkmale: Haar-Klassifikatoren für Augen/Mund/Nase hinzufügen, um die Erkennung zu erweitern.
DNN statt Haar verwenden: OpenCV DNN + ResNet/MobileNet kann eine höhere Genauigkeit liefern (benötigt jedoch mehr Rechenleistung).
7. Erweiterte Übungen
Verwenden Sie
cv2.equalizeHistauf dem Graustufenbild, um die Erkennung bei schwachem Licht zu verbessern.Fügen Sie Haar-Klassifikatoren für Mund oder Nase hinzu, um weitere Gesichtsmerkmale zu erkennen.
Zeichnen Sie den Erkennungsprozess mit
cv2.VideoWriterauf.Kombinieren Sie das Programm mit GPIO-Ausgabe für ein Raspberry-Pi-Projekt: „LED einschalten, wenn ein Gesicht erkannt wird“.