Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Peeks.
Sonderrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [here] und treten Sie noch heute bei!
7. Canny-Kantenerkennung
In diesem Kapitel erfassen wir Echtzeitvideo mit Raspberry Pi + Picamera2 und führen eine Kantenerkennung mit dem Canny-Algorithmus von OpenCV durch. Die Kantenerkennung ist ein grundlegender Bestandteil der Computer Vision, und der Canny-Algorithmus gilt als eine der stabilsten und rauschresistentesten Methoden.
1. Was macht der Canny-Algorithmus?
In Bildern entsprechen Kanten normalerweise Stellen mit starken Intensitätsänderungen (Graustufen), zum Beispiel:
Objektumrisse
Grenzen zwischen hellen und dunklen Bereichen
Strukturelle Kantenlinien
Das Ziel der Canny-Kantenerkennung ist:
Kanteninformationen präzise zu extrahieren, während unnötige Störungen reduziert werden;
eine zuverlässige Grundlage für nachfolgende Verfahren wie Konturerkennung, Objektsegmentierung und geometrische Erkennung (z. B. Kreise, Rechtecke) zu schaffen;
in der Robotikvision wird sie häufig für Pfaderkennung und Hinderniserkennung verwendet.
2. Code ausführen
Wichtig
Stellen Sie vor dem Start sicher, dass:
das Pan-Tilt-Modul montiert ist
Sie Zugriff auf den Raspberry-Pi-Desktop haben
das Codepaket installiert ist
das Fusion HAT+ installiert und konfiguriert ist
OpenCV installiert ist
Detaillierte Anweisungen finden Sie unter 0. OpenCV einrichten.
Öffnen Sie das Terminal und geben Sie den folgenden Befehl ein:
cd ~/ai-lab-kit/opencv_python python3 cv_7_canny.py
Tipp
Zusätzlich stellen wir
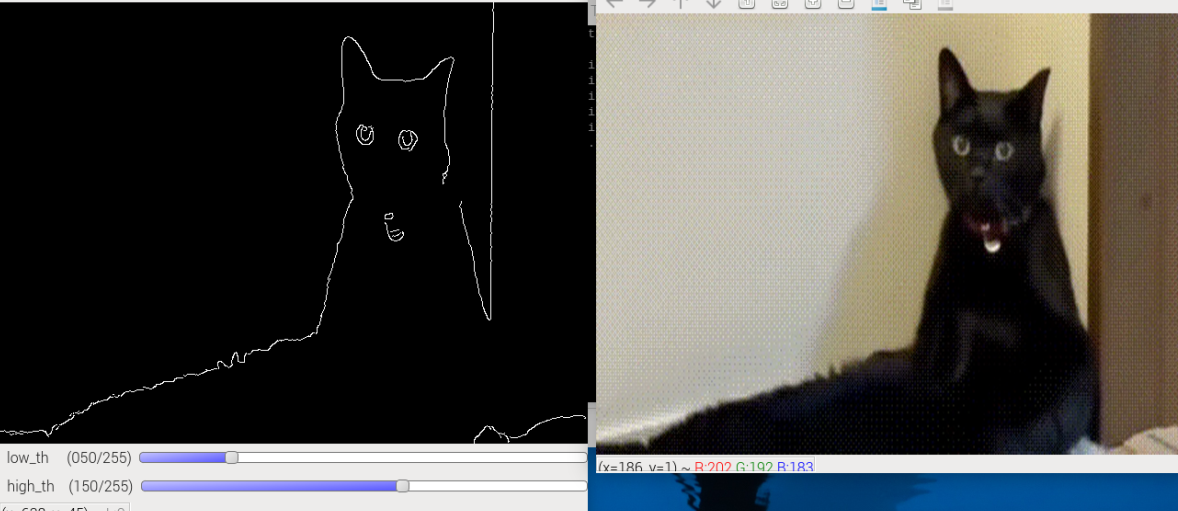
cv_7_canny_video.pyzur Verarbeitung von Videodateien sowiecv_7_canny_conbine.pybereit, um Echtzeitaufnahme und Video in einer kombinierten Ansicht zu verarbeiten.Wenn Sie das Programm ausführen, erscheinen zwei OpenCV-Fenster:
Camera – zeigt das Live-Kamerabild
Canny Edges – zeigt die in Echtzeit erkannten Kanten
Sie können die Schwellenwerte der Kantenerkennung mithilfe der Trackbars anpassen. Drücken Sie q oder schließen Sie ein Fenster, um das Programm zu beenden.
3. Vollständiger Code
from picamera2 import Picamera2
import cv2
# Empty callback function for trackbars (required by OpenCV API)
def _noop(x):
pass
# -----------------------------
# Camera setup
# -----------------------------
picam2 = Picamera2()
# Create a preview configuration:
# size: resolution of the camera image
# format: XRGB8888 (4-channel image, similar to BGRA)
picam2.configure(
picam2.create_preview_configuration(
main={"size": (640, 480), "format": "XRGB8888"}
)
)
# Start the camera
picam2.start()
# -----------------------------
# Create OpenCV windows
# -----------------------------
WIN_CAM = "Camera" # window for original image
WIN_EDGE = "Canny Edges" # window for edge detection result
cv2.namedWindow(WIN_CAM)
cv2.namedWindow(WIN_EDGE)
# -----------------------------
# Create trackbars to tune Canny thresholds
# -----------------------------
# low_th: lower threshold for Canny
# high_th: higher threshold for Canny
cv2.createTrackbar("low_th", WIN_EDGE, 50, 255, _noop)
cv2.createTrackbar("high_th", WIN_EDGE, 150, 255, _noop)
print("Press 'q' to exit")
# -----------------------------
# Main loop
# -----------------------------
while True:
# Capture one frame from the camera (BGRA format)
frame_bgra = picam2.capture_array()
# Convert BGRA to BGR for OpenCV processing
frame_bgr = cv2.cvtColor(frame_bgra, cv2.COLOR_BGRA2BGR)
# Convert the frame to grayscale
gray = cv2.cvtColor(frame_bgr, cv2.COLOR_BGR2GRAY)
# Apply Gaussian blur to reduce noise
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
# Read current threshold values from trackbars
low_th = cv2.getTrackbarPos("low_th", WIN_EDGE)
high_th = cv2.getTrackbarPos("high_th", WIN_EDGE)
# Ensure high_th is always larger than low_th
if high_th <= low_th:
high_th = low_th + 1
cv2.setTrackbarPos("high_th", WIN_EDGE, high_th)
# Perform Canny edge detection
edges = cv2.Canny(blurred, low_th, high_th)
# Show original camera image
cv2.imshow(WIN_CAM, frame_bgr)
# Show edge detection result
cv2.imshow(WIN_EDGE, edges)
# Process GUI events and keyboard input
key = cv2.waitKey(1) & 0xFF
# Press 'q' to exit the program
if key == ord("q"):
break
# Exit if the user closes any OpenCV window
if (cv2.getWindowProperty(WIN_CAM, cv2.WND_PROP_VISIBLE) < 1 or
cv2.getWindowProperty(WIN_EDGE, cv2.WND_PROP_VISIBLE) < 1):
break
# -----------------------------
# Cleanup
# -----------------------------
picam2.stop() # Stop the camera
cv2.destroyAllWindows() # Close all OpenCV windows
4. Code-Erklärung
Eine Callback-Funktion für die Trackbars definieren:
def _noop(x): pass
OpenCV-Trackbars benötigen eine Callback-Funktion. Da wir darin nichts ausführen müssen, genügt eine leere Funktion.
Picamera2 initialisieren und das Vorschauformat festlegen:
picam2 = Picamera2() picam2.configure( picam2.create_preview_configuration( main={"size": (640, 480), "format": "XRGB8888"} ) ) picam2.start()
Dadurch wird die Raspberry-Pi-Kamera mit einer Auflösung von 640×480 gestartet.
XRGB8888ist ein 4-Kanal-Format, sodass die Frames BGRA-ähnlich sind.Zwei OpenCV-Fenster erstellen:
WIN_CAM = "Camera" WIN_EDGE = "Canny Edges" cv2.namedWindow(WIN_CAM) cv2.namedWindow(WIN_EDGE)
Ein Fenster zeigt das originale Kamerabild, das andere das Ergebnis der Canny-Kantenerkennung.
Trackbars erstellen, um die Canny-Schwellenwerte in Echtzeit anzupassen:
cv2.createTrackbar("low_th", WIN_EDGE, 50, 255, _noop) cv2.createTrackbar("high_th", WIN_EDGE, 150, 255, _noop)
low_th: unterer Schwellenwert für Canny.high_th: oberer Schwellenwert für Canny.
Sie können diese Schieberegler verschieben, um die Empfindlichkeit der Kantenerkennung zu ändern.
Ein Frame erfassen und für die OpenCV-Verarbeitung konvertieren:
frame_bgra = picam2.capture_array() frame_bgr = cv2.cvtColor(frame_bgra, cv2.COLOR_BGRA2BGR)
Die Kamera gibt ein 4-Kanal-Bild aus, daher konvertieren wir es in das Standard-3-Kanal-BGR-Format.
In Graustufen konvertieren und das Bild weichzeichnen:
gray = cv2.cvtColor(frame_bgr, cv2.COLOR_BGR2GRAY) blurred = cv2.GaussianBlur(gray, (5, 5), 0)
Canny arbeitet mit Graustufenbildern.
Die Gaußsche Unschärfe reduziert Rauschen und verhindert zu viele falsche Kanten.
Trackbar-Werte lesen und gültig halten:
low_th = cv2.getTrackbarPos("low_th", WIN_EDGE) high_th = cv2.getTrackbarPos("high_th", WIN_EDGE) if high_th <= low_th: high_th = low_th + 1 cv2.setTrackbarPos("high_th", WIN_EDGE, high_th)
Canny erwartet, dass
high_thgrößer alslow_thist. Dieser Codeblock korrigiert die Werte automatisch, wenn sie zu nah beieinander liegen.Canny-Kantenerkennung ausführen:
edges = cv2.Canny(blurred, low_th, high_th)
Canny hebt starke Kanten im Bild hervor. Niedrigere Schwellenwerte erkennen meist mehr Kanten, aber auch mehr Rauschen.
Beide Fenster anzeigen:
cv2.imshow(WIN_CAM, frame_bgr) cv2.imshow(WIN_EDGE, edges)
Das linke Fenster zeigt das Live-Kamerabild, das andere die erkannten Kanten.
Abbruchbedingungen (
qdrücken oder Fenster schließen):key = cv2.waitKey(1) & 0xFF if key == ord("q"): break if (cv2.getWindowProperty(WIN_CAM, cv2.WND_PROP_VISIBLE) < 1 or cv2.getWindowProperty(WIN_EDGE, cv2.WND_PROP_VISIBLE) < 1): break
Dadurch können Einsteiger das Programm auf zwei Arten beenden: über die Tastatur oder durch Schließen des Fensters.
Aufräumen:
picam2.stop() cv2.destroyAllWindows()
Beenden Sie immer den Kamerastream und schließen Sie alle OpenCV-Fenster, um Ressourcen freizugeben.
5. Warum ist Canny nützlich?
Die Ausgabe von Canny eignet sich sehr gut für weitere Computer-Vision-Aufgaben:
Anwendung |
Beschreibung |
|---|---|
Konturerkennung |
Verwenden Sie |
Objektsegmentierung |
Verwenden Sie Kanten als Grundlage, um Zielobjekte vom Hintergrund zu trennen |
Formerkennung |
Kombination mit Hough-Transformationen zur Erkennung von Kreisen, Linien usw. |
Roboternavigation |
Erkennung von Boden, Straßen oder Hindernisumrissen zur Unterstützung der Planung |
OCR / Ziel-Lokalisierung |
Textbereiche, QR-Codes und Marker besitzen oft klare Kantenstrukturen |
Canny ist nicht nur „optisch beeindruckend“, sondern der Einstiegspunkt für viele weiterführende Computer-Vision-Pipelines.
6. Tipps zur Auswahl der Schwellenwerte
Szenario |
low_th |
high_th |
Hinweise |
|---|---|---|---|
Stabile Innenbeleuchtung |
50 |
150 |
Allgemeiner Fall, stabile Ergebnisse |
Starkes Licht & hoher Kontrast |
100 |
200 |
Schwellenwerte erhöhen, um falsche Kanten zu reduzieren |
Schwaches Licht, viel Rauschen |
30 |
100 |
Niedrigere Schwellenwerte, um mehr Details zu erhalten |
Sehr unscharfe Kanten |
20 |
80 |
Schwellenwerte weiter senken, um die Kantenerkennung empfindlicher zu machen |
Verwenden Sie die Trackbars, um schnell einen geeigneten Bereich einzustellen, und übernehmen Sie die Werte anschließend fest in Ihr Programm.
7. Erweiterte Übungen
Verwenden Sie
cv2.findContoursauf dem Canny-Ergebnis, um Objektkonturen zu zeichnen.Ändern Sie die Größe des Gauß-Kernels und beobachten Sie, wie sich die Genauigkeit der Kantenerkennung verändert.
Testen Sie verschiedene Schwellenwerte bei schwacher und starker Beleuchtung, um den Effekt der Doppel-Schwellenwerte zu verstehen.
Nutzen Sie die Kantenkarte zur Formerkennung mit
cv2.HoughLines(Linien) odercv2.HoughCircles(Kreise).