Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
1.3 Das Rad drehen¶
Ein Motor ist ein typisches digitales Ausgabegerät und wird genauso verwendet wie eine LED. Der Motor muss jedoch mit einem hohen Strom betrieben werden, und der hohe Strom kann das Hauptsteuerungsboard wie das R4-Board beschädigen. Deshalb wird bei dieser Gelegenheit ein Motor-Treibermodul verwendet, welches eine große Hilfe für das R4-Board ist, um den Motor sicher zu steuern.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein ganzes Kit zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
3 in 1 Starter Kit |
380+ |
Sie können sie auch separat über die untenstehenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUF-LINK |
|---|---|
- |
|
- |
|
- |
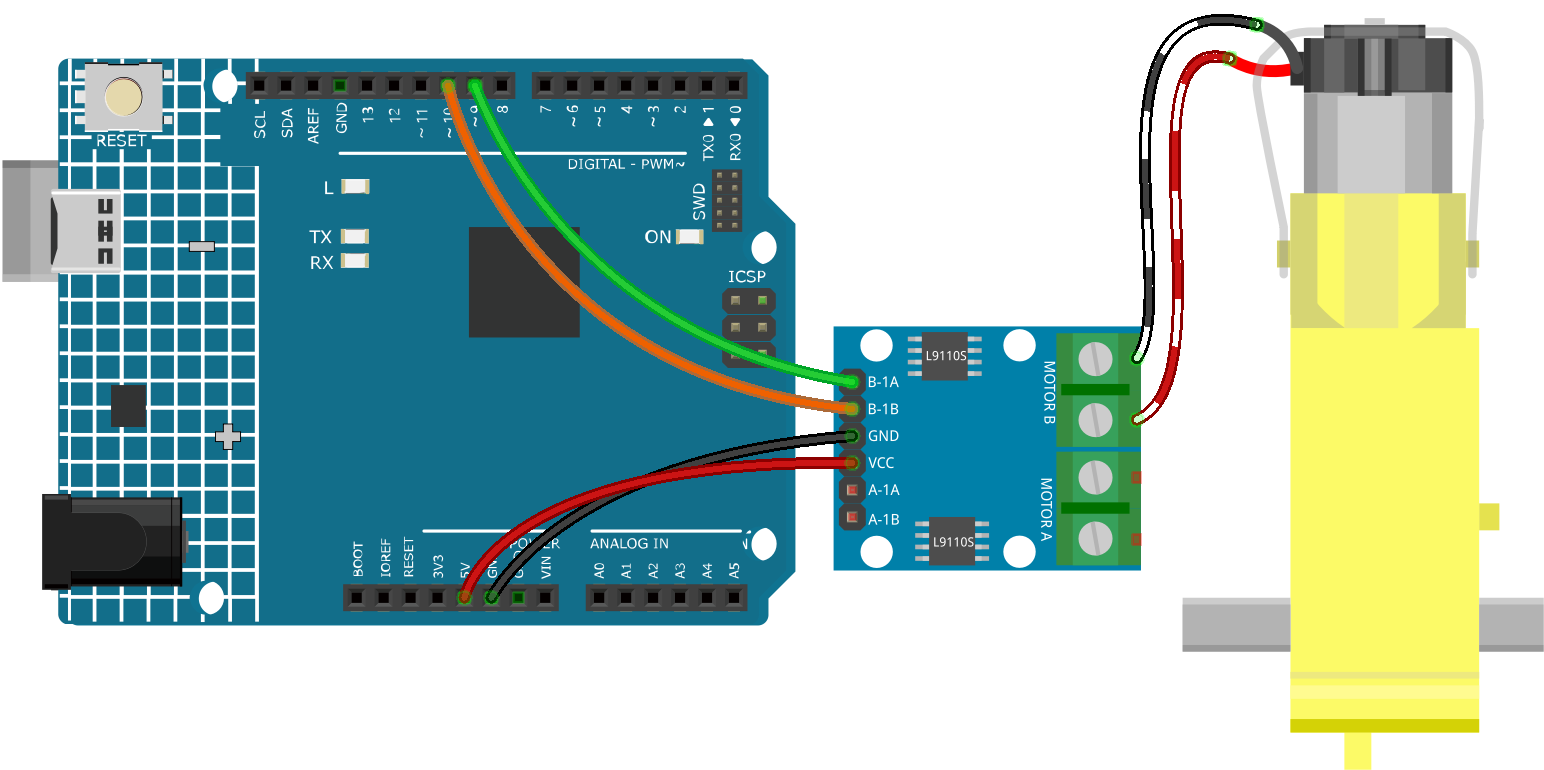
Schaltplan

Verdrahtung
L9110S |
R4-Board |
Motor |
|---|---|---|
VCC |
5V |
|
GND |
GND |
|
B-1B(B-2A) |
9 |
|
B-1A |
10 |
|
OA |
ein Draht des Motors |
|
OB |
ein Draht des Motors |
Code
Bemerkung
Sie können die Datei
1.3.turn_the_wheel.inounter dem Pfad3in1-kit\learning_project\1.3.turn_the_wheelöffnen.Oder kopieren Sie diesen Code in die Arduino IDE.