备注
你好,欢迎来到 SunFounder 树莓派、Arduino 和 ESP32 爱好者社区的 Facebook 页面!与其他爱好者一起深入探讨树莓派、Arduino 和 ESP32。
为什么加入?
专家支持: 通过我们的社区和团队的帮助解决售后问题和技术挑战。
学习与分享: 交流技巧和教程,提升你的技能。
独家预览: 提前了解新产品发布和预告。
特别折扣: 尊享我们最新产品的专属折扣。
节日促销和赠品: 参与赠品活动和节日促销。
👉 准备好与我们一起探索和创造了吗?点击 [这里] 加入我们吧!
12. 摆钟¶
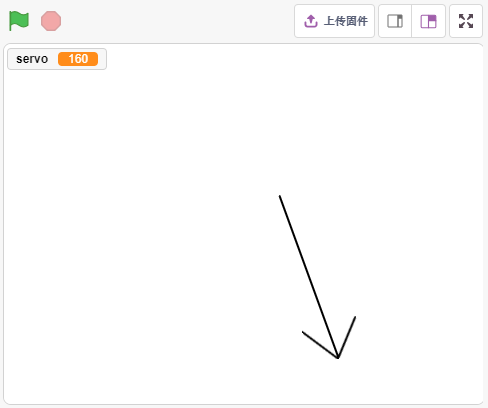
在这个项目中,我们将制作一个箭头钟摆,同时舵机会跟着转动。
你将学习¶
舵机的工作原理及角度范围
画一个精灵,将中心点放尾部。
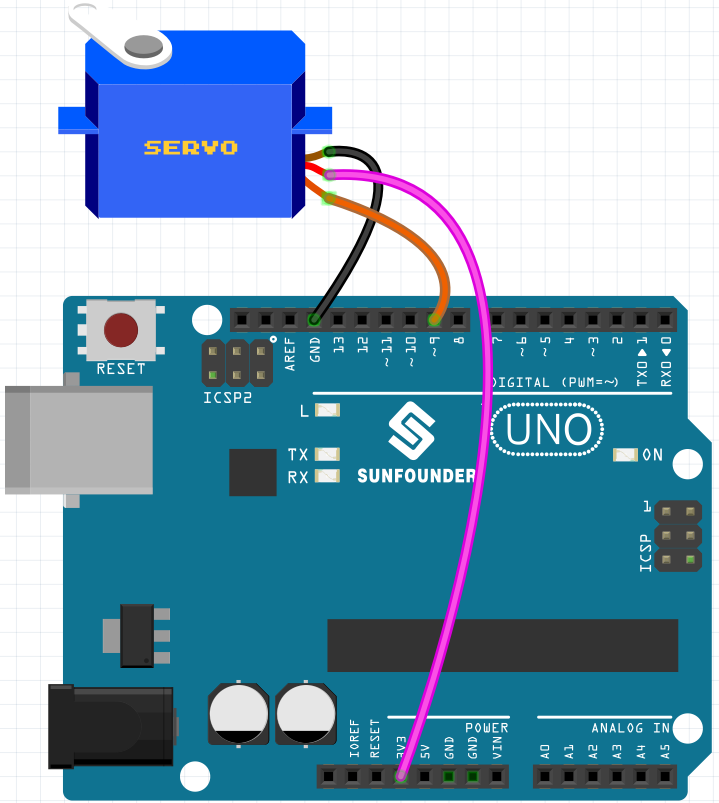
搭建电路¶
伺服是一种只能旋转 180 度的齿轮电机。它是通过从电路板发送电脉冲来控制的。这些脉冲告诉伺服它应该移动到什么位置。
舵机共有三根线:棕色线为GND,红色线为VCC(接3.3V),橙色线为信号线。角度范围为 0-180。
现在根据下图构建电路:
编程¶
1. 画一个精灵
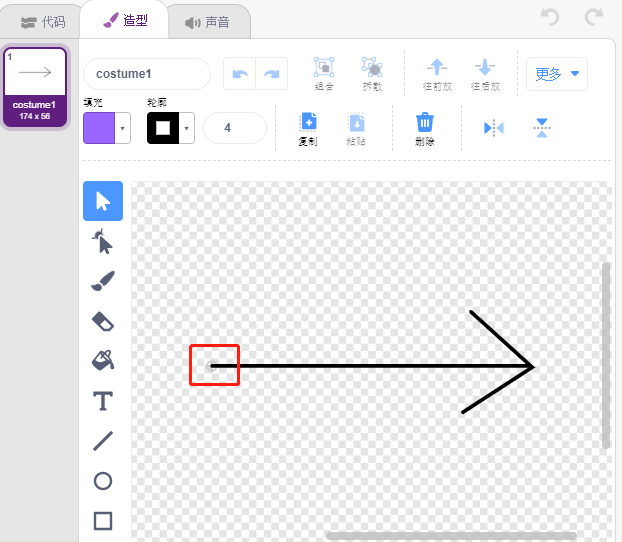
删除默认的精灵,选择精灵按钮,点击 绘制,将出现一个空白精灵Sprite1。

在打开的 造型 页面,使用 画线段 工具画一个箭头。
备注
一定要从画布的中心点向外开始画箭头,这样就能保证箭头是以中心点为原点转圈。 按住Shift可让线角度为直的或45度方向。
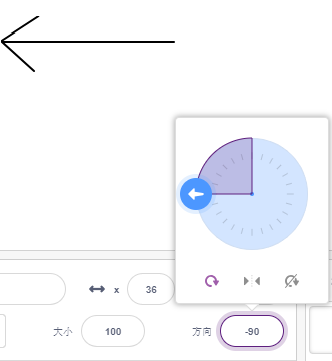
画完之后,将在舞台上显示箭头精灵,将它命名为 arrow。然后点击 方向 后的270,将出现一个圆形表盘,现在拖动这个箭头,看下舞台上的arrow精灵是否以尾部为原点转圈。
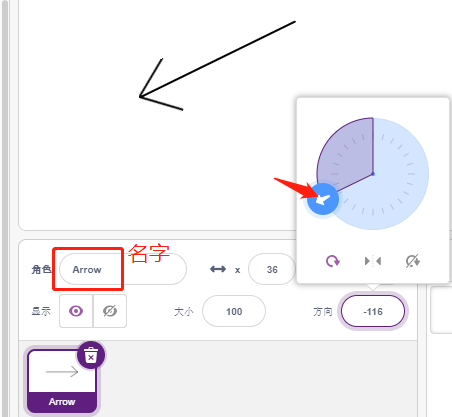
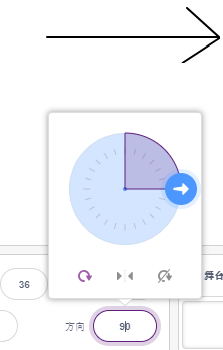
若要让arrow精灵从左边摆动到右边,角度范围是-90~-180,180~90。
2. 创建变量
创建一个变量servo, 用来存放角度值,并设置初始值为270。

3. 从左边摆动到右边
现在让箭头精灵从左边-90度位置摆动到右边90度位置。
通过[重新()次]块, 将变量每次加-10,通过18次就能加到90度。然后用[面向()方向]让arrow精灵转到这些角度。
由于精灵转动角度是-180 ~ 180,超出这个范围的角度会通过下面的条件来换算。
如果角度 > 180,则角度-360.

4. 转动舵机
当你点击绿色旗子的时候,你会发现箭头迅速转动到右边,然后回到左边,所以这里用一个[等待()秒]块让转动速度慢点。另外使用[上()组伺服至()角]块让接在Arduino板上的舵机转到特定的角度。

5. 从右边摆动到左边
通过同样的方法,让舵机和箭头精灵从右边慢慢转动到左边。
