注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.2.6 速度センサーモジュール
はじめに
本プロジェクトでは、速度センサーモジュールの使い方を学びます。速度センサーモジュールは、モーターなどの回転する物体の速度を測定するためのタコメーターの一種です。
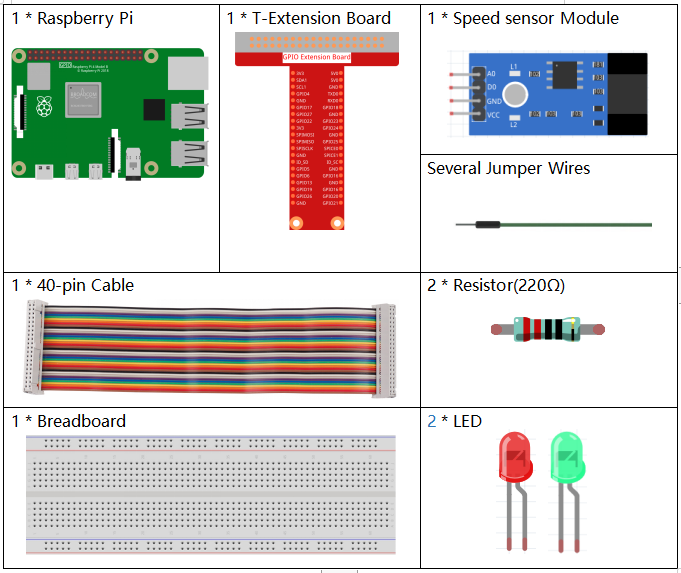
必要な部品
本プロジェクトに必要なコンポーネントは以下の通りです。
全体のキットを購入すると便利です。リンクはこちら:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Raphael Kit |
337 |
以下のリンクから、個別に購入することもできます。
コンポーネントの紹介 |
購入リンク |
|---|---|
- |
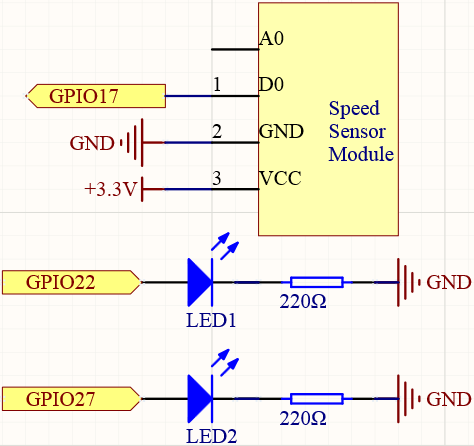
回路図
実験手順
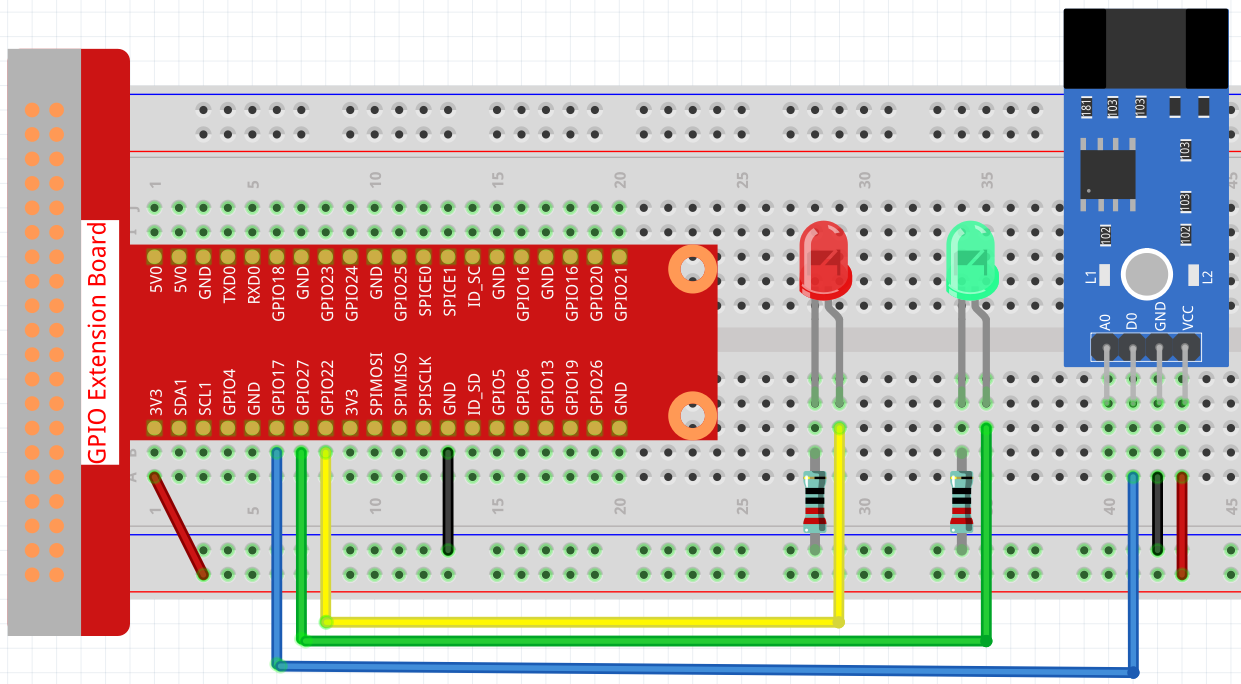
ステップ1: 回路を作成する。
ステップ2: ディレクトリを変更する。
cd ~/raphael-kit/python
ステップ3: 実行する。
sudo python3 2.2.6_speed_sensor_module.py
コードが実行された後、緑色のLEDが点灯します。速度センサーモジュールのギャップに障害物を置くと、「light blocked」と表示され、赤いLEDが点灯します。障害物を取り除くと、緑色のLEDが再び点灯します。
コード
注釈
下記のコードは 変更/リセット/コピー/実行/停止 ができます。ただし、それ以前に、ソースコードのパス(例: raphael-kit/python )に移動する必要があります。コードを変更した後、その効果を直接確認するために実行できます。
#!/usr/bin/env python3
import RPi.GPIO as GPIO
speedPin = 17
Gpin = 27
Rpin = 22
def setup():
GPIO.setmode(GPIO.BCM) #
GPIO.setup(Gpin, GPIO.OUT) # Set Green Led Pin mode to output
GPIO.setup(Rpin, GPIO.OUT) # Set Red Led Pin mode to output
GPIO.setup(speedPin, GPIO.IN, pull_up_down=GPIO.PUD_UP) # Set speedPin's mode is input, and pull up to high level(3.3V)
GPIO.add_event_detect(speedPin, GPIO.BOTH, callback=detect, bouncetime=200)
def Led(x):
if x == 0:
GPIO.output(Rpin, 0)
GPIO.output(Gpin, 1)
if x == 1:
GPIO.output(Rpin, 1)
GPIO.output(Gpin, 0)
print ('Light was blocked')
def detect(chn):
Led(GPIO.input(speedPin))
def loop():
while True:
pass
def destroy():
GPIO.output(Gpin, GPIO.LOW) # Green led off
GPIO.output(Rpin, GPIO.LOW) # Red led off
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed.
destroy()
コードの説明
GPIO.add_event_detect(speedPin, GPIO.BOTH, callback=detect, bouncetime=200)
ここでイベントを追加し、 speedPin のレベルが変わるたびに detect() を呼び出して、2つのLEDをオン/オフで制御します。
def Led(x):
if x == 0:
GPIO.output(Rpin, 0)
GPIO.output(Gpin, 1)
if x == 1:
GPIO.output(Rpin, 1)
GPIO.output(Gpin, 0)
print ('Light was blocked')
Led() という関数を定義し、引数が1のときは赤いLEDをオンにして Light was blocked と出力します。引数が0のときは緑色のLEDをオンにします。
def detect(chn):
Led(GPIO.input(speedPin))
コールバック関数を定義し、 speedPin の値に応じて2つのLEDをオン/オフで制御します。
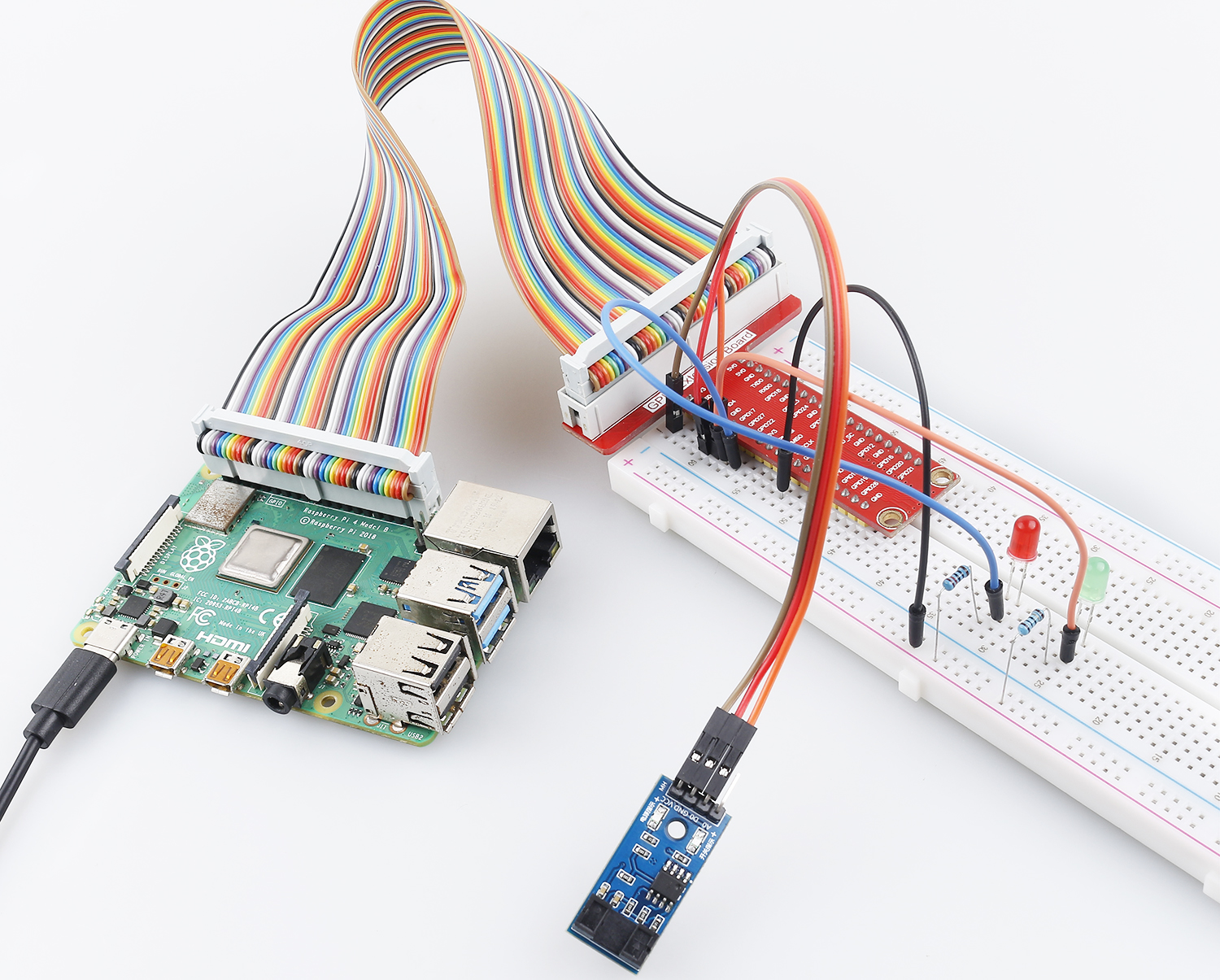
現象の画像