Nota
Ciao, benvenuto nella Community di SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts su Facebook! Approfondisci il mondo di Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto Tecnico Esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra comunità e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e alle anteprime.
Sconti Speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a giveaway e promozioni durante le festività.
👉 Sei pronto a esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
1.3.2 Servo
Introduzione
In questo progetto, impareremo a far ruotare un servomotore.
Componenti Necessari
Per questo progetto, avremo bisogno dei seguenti componenti.
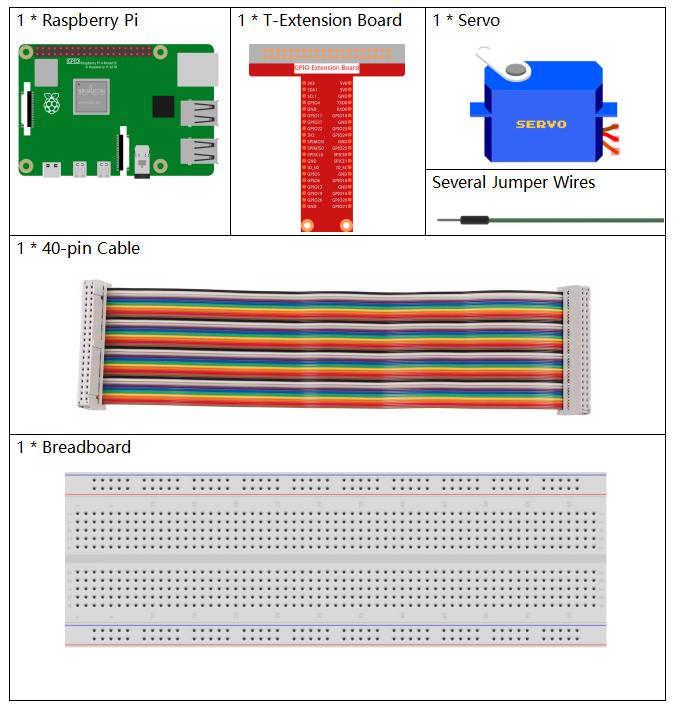
È decisamente conveniente acquistare un kit completo, ecco il link:
Nome |
COMPONENTI NEL KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
Puoi anche acquistarli separatamente dai link sottostanti.
INTRODUZIONE AI COMPONENTI |
LINK D’ACQUISTO |
|---|---|
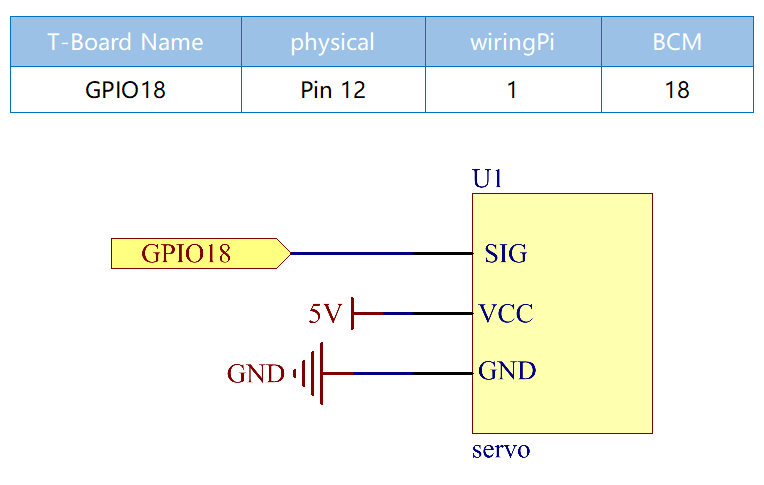
Schema Elettrico
Procedure Sperimentali
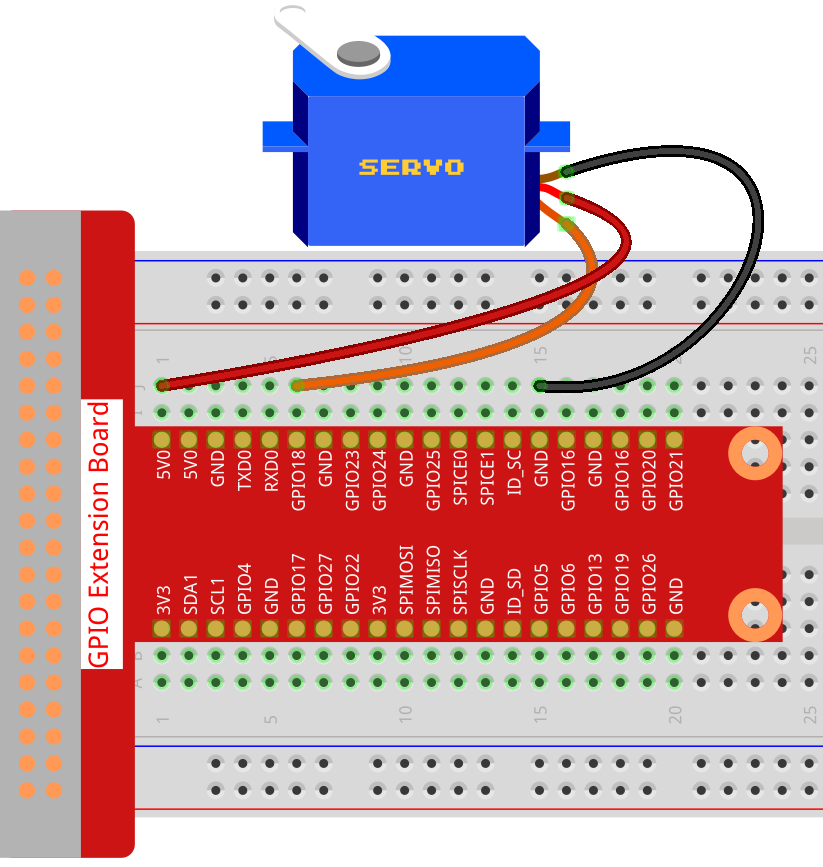
Passo 1: Costruisci il circuito.
Passo 2: Accedi alla cartella del codice.
cd ~/raphael-kit/python-pi5
Passo 3: Esegui il file eseguibile.
sudo python3 1.3.2_Servo_zero.py
Dopo l’esecuzione del programma, il servomotore ruoterà da 0 gradi a 90 fino a 180 gradi, e poi da 180 gradi a 90 fino a 0 gradi, in un ciclo continuo.
Avvertimento
Se viene visualizzato l’errore RuntimeError: Cannot determine SOC peripheral base address, fare riferimento a If gpiozero doesn’t work..
Code
Nota
Puoi Modificare/Resettare/Copiare/Eseguire/Fermare il codice qui sotto. Ma prima, devi andare nella directory del codice come raphael-kit/python-pi5. Dopo aver modificato il codice, puoi eseguirlo direttamente per vedere l’effetto.
#!/usr/bin/env python3
from gpiozero import Servo
from time import sleep
# Imposta il numero di pin GPIO a cui è collegato il servomotore
myGPIO = 18
# Definisci un fattore di correzione per regolare la larghezza degli impulsi del servo
myCorrection = 0.45
maxPW = (2.0 + myCorrection) / 1000 # Calcola la larghezza massima degli impulsi
minPW = (1.0 - myCorrection) / 1000 # Calcola la larghezza minima degli impulsi
# Inizializza l'oggetto Servo con larghezze di impulsi personalizzate
servo = Servo(myGPIO, min_pulse_width=minPW, max_pulse_width=maxPW)
try:
while True:
# Posiziona il servo al centro e attendi
servo.mid()
print("mid") # Indica la posizione attuale
sleep(0.5) # Breve pausa di 0.5 secondi
# Sposta il servo alla sua posizione minima e attendi
servo.min()
print("min") # Indica la posizione attuale
sleep(1) # Mantieni la posizione per 1 secondo
# Riporta il servo alla posizione centrale e attendi
servo.mid()
print("mid") # Indica la posizione attuale
sleep(0.5) # Breve pausa di 0.5 secondi
# Sposta il servo alla sua posizione massima e attendi
servo.max()
print("max") # Indica la posizione attuale
sleep(1) # Mantieni la posizione per 1 secondo
except KeyboardInterrupt:
# Termina in modo sicuro lo script con un'interruzione da tastiera (Ctrl+C)
pass
Spiegazione del Codice
Questi importano la classe
Servoper il controllo del servo e la funzionesleepper i ritardi temporali.#!/usr/bin/env python3 from gpiozero import Servo from time import sleep
Imposta il numero di pin GPIO 18 per collegare il servomotore.
# Imposta il numero di pin GPIO a cui è collegato il servomotore myGPIO = 18
Queste linee definiscono un fattore di correzione e lo utilizzano per calcolare la larghezza massima e minima degli impulsi per il servo, regolando la gamma di movimento.
# Definisci un fattore di correzione per regolare la larghezza degli impulsi del servo myCorrection = 0.45 maxPW = (2.0 + myCorrection) / 1000 # Calcola la larghezza massima degli impulsi minPW = (1.0 - myCorrection) / 1000 # Calcola la larghezza minima degli impulsi
Inizializza l’oggetto Servo con il pin GPIO specificato e larghezze di impulsi personalizzate.
# Inizializza l'oggetto Servo con larghezze di impulsi personalizzate servo = Servo(myGPIO, min_pulse_width=minPW, max_pulse_width=maxPW)
Il blocco
trycontiene un ciclowhile Trueper muovere continuamente il servo. Il servo viene posizionato a metà, min e max punti, con ciascuna posizione stampata e mantenuta per una durata specificata.try: while True: # Posiziona il servo al centro e attendi servo.mid() print("mid") # Indica la posizione attuale sleep(0.5) # Breve pausa di 0.5 secondi # Sposta il servo alla sua posizione minima e attendi servo.min() print("min") # Indica la posizione attuale sleep(1) # Mantieni la posizione per 1 secondo # Riporta il servo alla posizione centrale e attendi servo.mid() print("mid") # Indica la posizione attuale sleep(0.5) # Breve pausa di 0.5 secondi # Sposta il servo alla sua posizione massima e attendi servo.max() print("max") # Indica la posizione attuale sleep(1) # Mantieni la posizione per 1 secondo except KeyboardInterrupt: # Termina in modo sicuro lo script con un'interruzione da tastiera (Ctrl+C) pass