Nota
Ciao, benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra comunità e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e anteprime esclusive.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e concorsi: Partecipa a concorsi e promozioni durante le festività.
👉 Sei pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
1.3.2 Servo
Introduzione
In questo progetto, impareremo come far ruotare un servo.
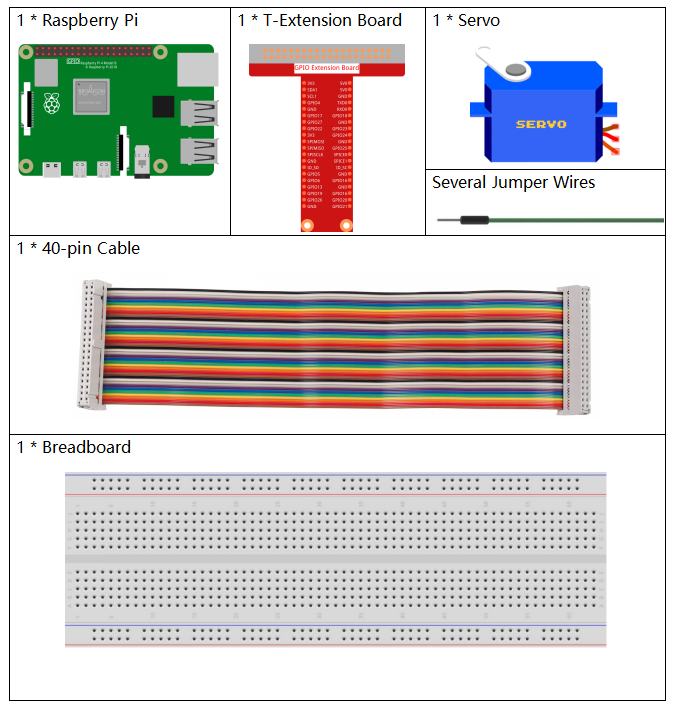
Componenti Necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente comodo acquistare un kit completo, ecco il link:
Nome |
ARTICOLI IN QUESTO KIT |
LINK |
|---|---|---|
Kit Raphael |
337 |
Puoi anche acquistarli separatamente dai link qui sotto.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
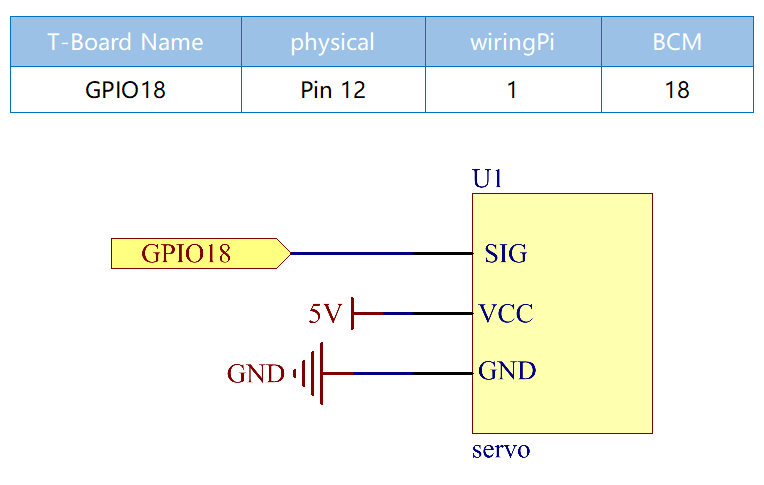
Schema Elettrico
Procedure Sperimentali
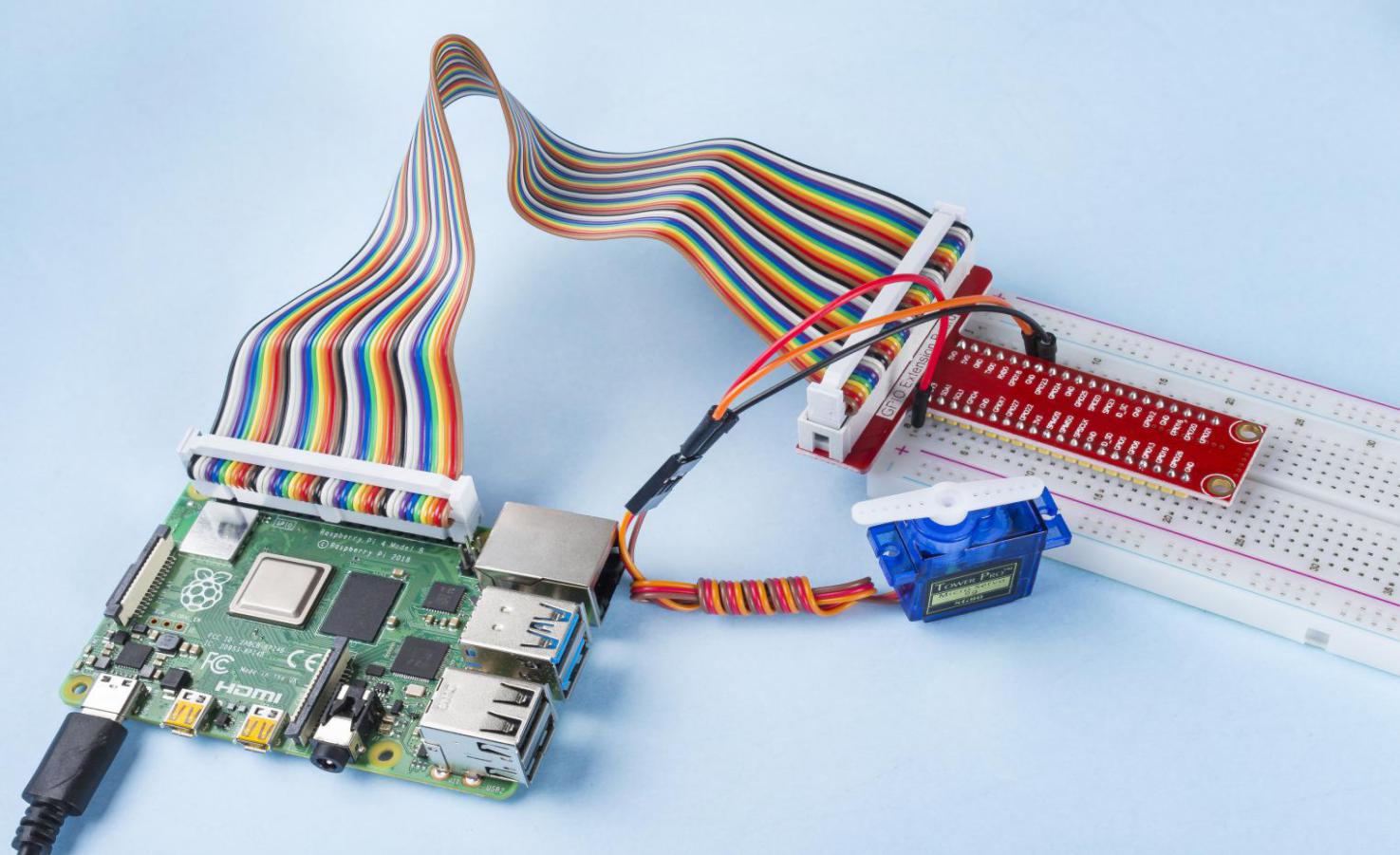
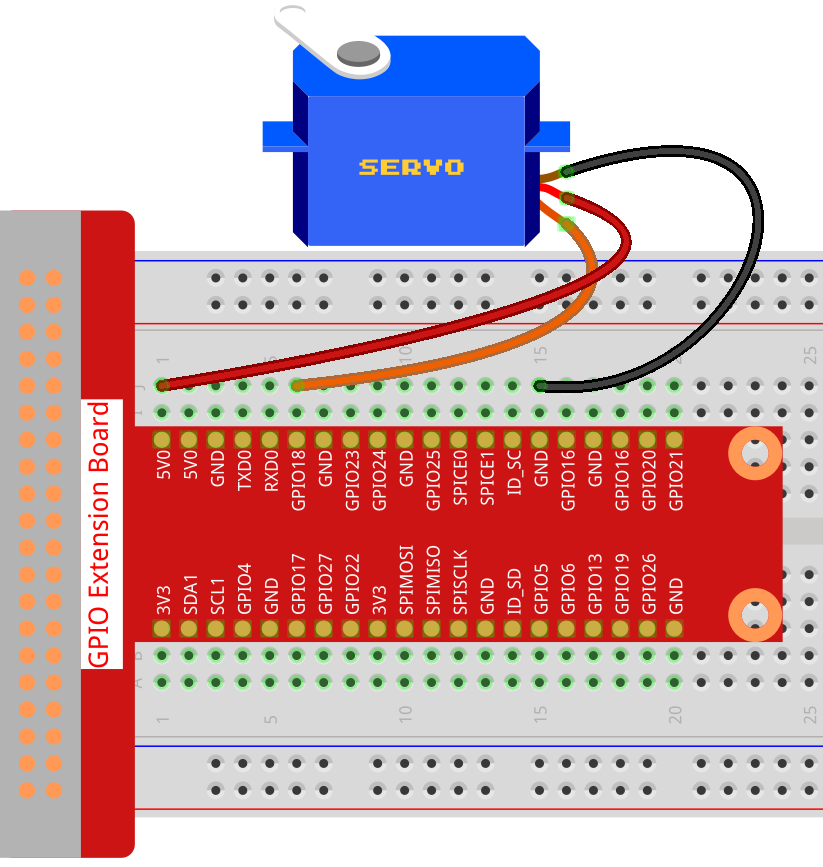
Passo 1: Costruisci il circuito.
Passo 2: Accedi alla cartella del codice.
cd ~/raphael-kit/python/
Passo 3: Esegui il file eseguibile.
sudo python3 1.3.2_Servo.py
Dopo l’esecuzione del programma, il servo ruoterà da 0 gradi a 180 gradi e poi da 180 gradi a 0 gradi, ciclicamente.
Codice
Nota
Puoi Modificare/Reimpostare/Copiare/Eseguire/Interrompere il codice qui sotto. Ma prima devi accedere al percorso del codice come raphael-kit/python. Dopo aver modificato il codice, puoi eseguirlo direttamente per vedere l’effetto.
import RPi.GPIO as GPIO
import time
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
ServoPin = 18
def map(value, inMin, inMax, outMin, outMax):
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
def setup():
global p
GPIO.setmode(GPIO.BCM) # Numerazione GPIO in modalità BCM
GPIO.setup(ServoPin, GPIO.OUT) # Imposta ServoPin come output
GPIO.output(ServoPin, GPIO.LOW) # Imposta ServoPin a basso
p = GPIO.PWM(ServoPin, 50) # Imposta la frequenza a 50Hz
p.start(0) # Duty Cycle = 0
def setAngle(angle): # Fa ruotare il servo a un angolo specifico (0-180 gradi)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)# mappa l'angolo sul duty cycle e lo invia
def loop():
while True:
for i in range(0, 181, 5): # fa ruotare il servo da 0 a 180 gradi
setAngle(i) # Invia l'angolo al servo
time.sleep(0.002)
time.sleep(1)
for i in range(180, -1, -5): # fa ruotare il servo da 180 a 0 gradi
setAngle(i)
time.sleep(0.001)
time.sleep(1)
def destroy():
p.stop()
GPIO.cleanup()
if __name__ == '__main__': # Il programma inizia qui
setup()
try:
loop()
except KeyboardInterrupt: # Quando viene premuto 'Ctrl+C', il programma destroy() sarà eseguito.
destroy()
Spiegazione del Codice
p = GPIO.PWM(ServoPin, 50) # Imposta la frequenza a 50Hz
p.start(0) # Duty Cycle = 0
Imposta il ServoPin su PWM, poi la frequenza su 50Hz e il periodo su 20ms.
p.start(0): Avvia la funzione PWM e imposta il valore iniziale su 0.
def setAngle(angle): # Fa ruotare il servo a un angolo specifico (0-180 gradi)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)
Crea una funzione, setAngle(), per inviare l’angolo da 0 a 180 al servo.
angle = max(0, min(180, angle))
Questo codice viene utilizzato per limitare l’angolo entro l’intervallo 0-180°.
La funzione min() restituisce il valore minimo tra quelli in ingresso. Se 180<angle, allora restituisce 180, altrimenti restituisce angle.
La funzione max() restituisce l’elemento massimo in un iterabile o il più grande tra due o più parametri. Se 0>angle, allora restituisce 0, altrimenti restituisce angle.
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)
Per convertire un angolo da 0 a 180° nel servo, l’ampiezza dell’impulso del servo è impostata su 0,5ms (500us) - 2,5ms (2500us).
Il periodo di PWM è 20ms (20000us), quindi il duty cycle del PWM varia da (500/20000)% a (2500/20000)%, e l’intervallo 0 ~ 180 è mappato su 2,5 ~ 12,5.
Immagine del Fenomeno