Nota
Ciao, benvenuto nella Community di appassionati di Raspberry Pi, Arduino e ESP32 di SunFounder su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato ai nuovi annunci di prodotti e alle anteprime.
Sconti speciali: Godi di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e giveaway: Partecipa a concorsi e promozioni durante le festività.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
1.3.2 Servo
Introduzione
In questo progetto, impareremo a far ruotare un servo motore.
Componenti necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
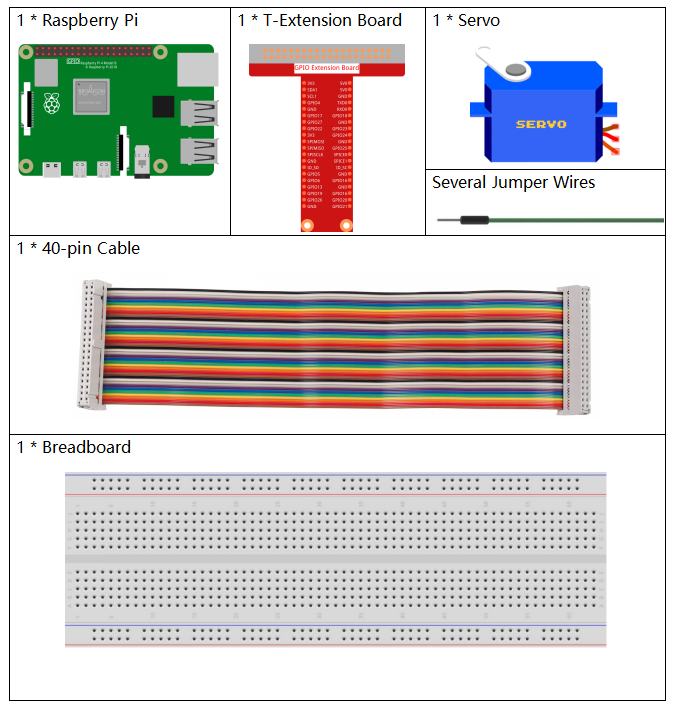
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
OGGETTI IN QUESTO KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
Puoi anche acquistarli separatamente dai link sottostanti.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
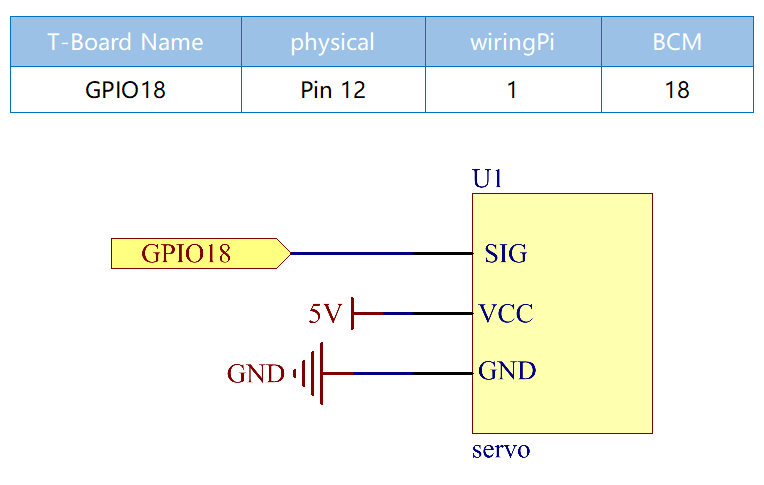
Schema elettrico
Procedure sperimentali
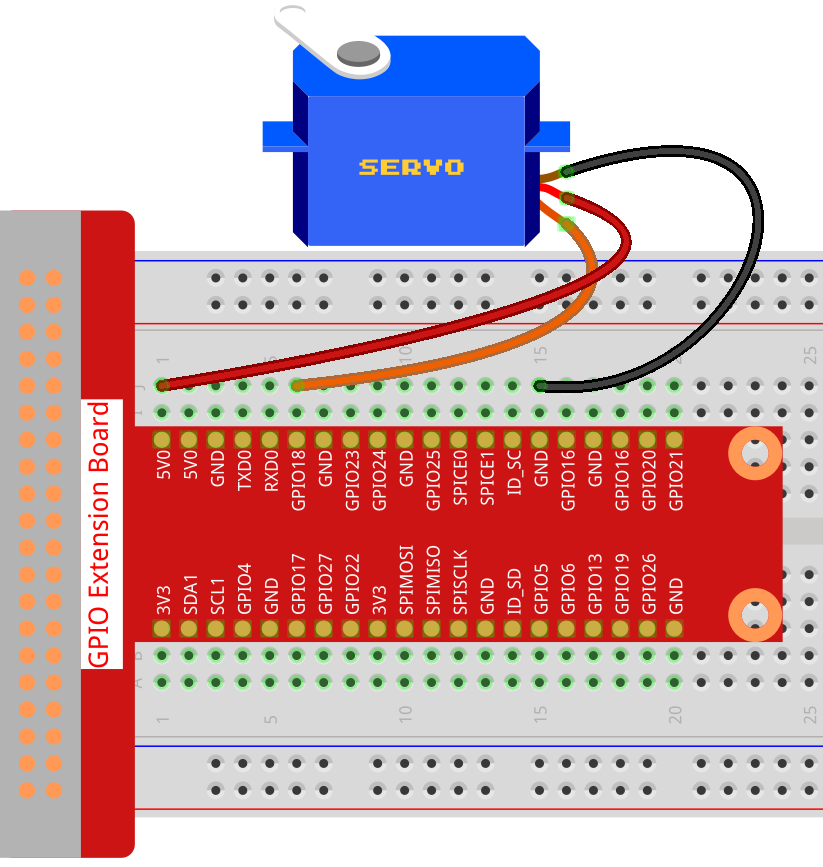
Passo 1: Costruisci il circuito.
Passo 2: Vai alla cartella del codice.
cd ~/raphael-kit/nodejs/
Passo 3: Esegui il codice.
sudo node servo.js
Dopo l’esecuzione del programma, il servo ruoterà da 0 gradi a 180 gradi, e poi da 180 gradi a 0 gradi, in modo ciclico.
Codice
const Gpio = require('pigpio').Gpio;
SERVO_MIN_ANGLE = 0
SERVO_MAX_ANGLE = 180
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
ServoPin = new Gpio(18,{mode: Gpio.OUTPUT})
function map(value, inMin, inMax, outMin, outMax){
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
}
function angle2pulse(angle){
return Math.floor(map(angle,SERVO_MIN_ANGLE,SERVO_MAX_ANGLE,SERVO_MIN_PULSE ,SERVO_MAX_PULSE))
}
let angle=90;
let step=5;
setInterval(() => {
if(angle>=180||angle<=0){
step=-step
}
angle+=step;
ServoPin.servoWrite(angle2pulse(angle));
}, 20);
Spiegazione del codice
const Gpio = require('pigpio').Gpio;
ServoPin = new Gpio(18,{mode: Gpio.OUTPUT})
Importa il modulo pigpio e crea un oggetto della classe Gpio, ServoPin, per controllare l’uscita di Gpio18.
SERVO_MIN_ANGLE = 0
SERVO_MAX_ANGLE = 180
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
function map(value, inMin, inMax, outMin, outMax){
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
}
function angle2pulse(angle){
return Math.floor(map(angle,SERVO_MIN_ANGLE,SERVO_MAX_ANGLE,SERVO_MIN_PULSE ,SERVO_MAX_PULSE))
}
Qui viene definita una funzione che mappa l’angolo alla larghezza dell’impulso.
Questo perché la funzione di controllo del servo servoWrite(pulseWidth) incapsulata nella classe Gpio deve scrivere la larghezza dell’impulso anziché l’angolo.
L’intervallo di angoli del servo che utilizziamo è 0~180, che deve essere mappato all’intervallo di pulseWidth, 500~2500.
let angle=90;
let step=5;
setInterval(() => {
if(angle>=180||angle<=0){
step=-step
}
angle+=step;
ServoPin.servoWrite(angle2pulse(angle));
}, 20);
Fa sì che l’angolo del servo si muova avanti e indietro da 0 a 180 gradi.
Immagine del fenomeno