Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete más en el mundo de Raspberry Pi, Arduino y ESP32 junto con otros entusiastas.
¿Por qué unirse?
Soporte Experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances Exclusivos: Obtén acceso anticipado a nuevos anuncios de productos y adelantos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones Festivas y Sorteos: Participa en sorteos y promociones festivas.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
2.2.9 Módulo MPU6050
Introducción
El MPU-6050 es el primer y único dispositivo de seguimiento de movimiento de 6 ejes del mundo (Giroscopio de 3 ejes y Acelerómetro de 3 ejes) diseñado para teléfonos inteligentes, tabletas y sensores portátiles que tienen estas características, incluyendo los requisitos de bajo consumo, bajo costo y alto rendimiento.
En este experimento, usaremos I2C para obtener los valores del sensor de aceleración de tres ejes y el giroscopio de tres ejes del MPU6050 y mostrarlos en la pantalla. “ “
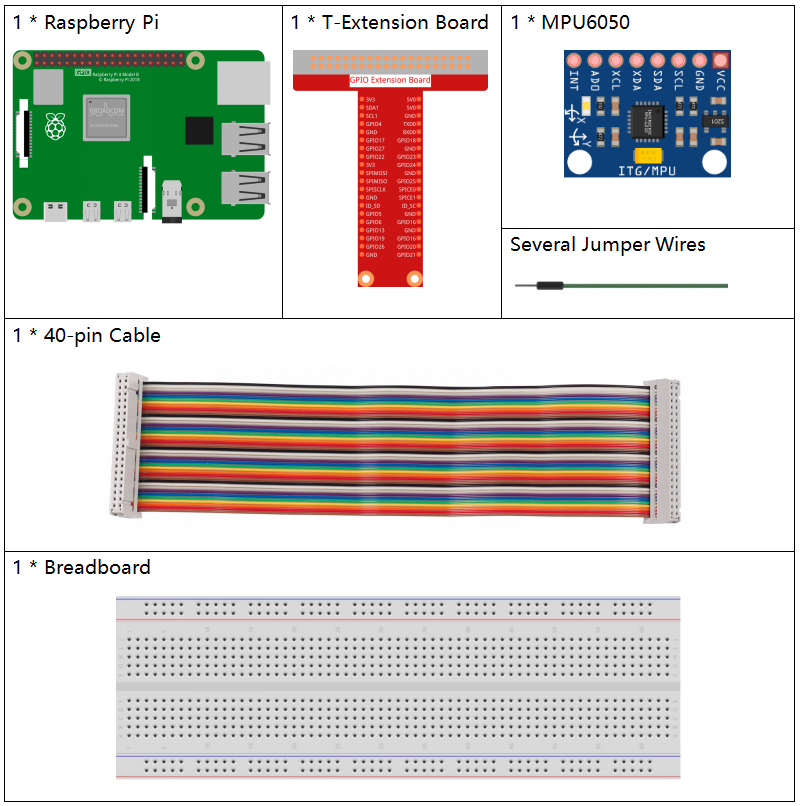
Componentes Necesarios
En este proyecto, necesitamos los siguientes componentes.
Es definitivamente conveniente comprar un kit completo, aquí tienes el enlace:
Nombre |
ARTÍCULOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Raphael |
337 |
También puedes comprarlos por separado en los siguientes enlaces.
INTRODUCCIÓN AL COMPONENTE |
ENLACE DE COMPRA |
|---|---|
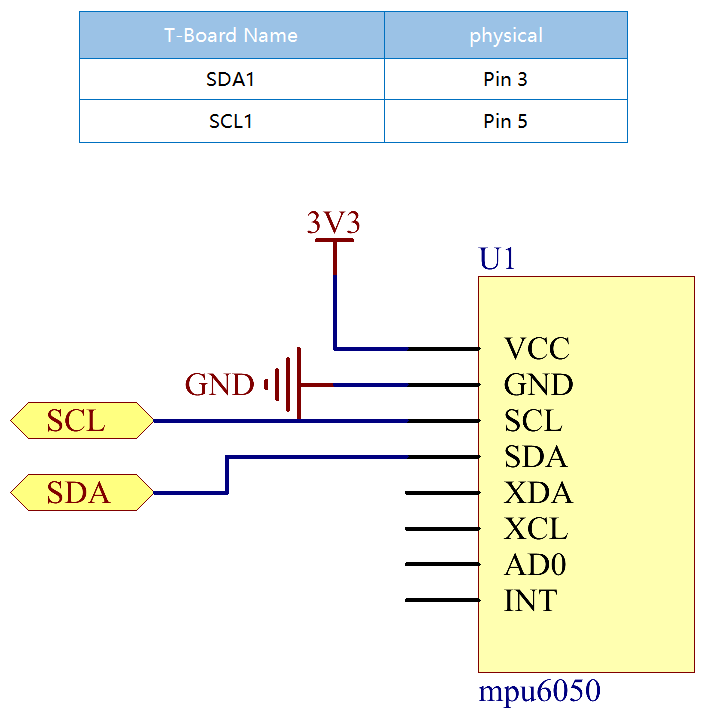
Diagrama Esquemático
El MPU6050 se comunica con el microcontrolador a través de la interfaz del bus I2C. Los pines SDA1 y SCL1 deben conectarse al pin correspondiente.
Procedimientos Experimentales
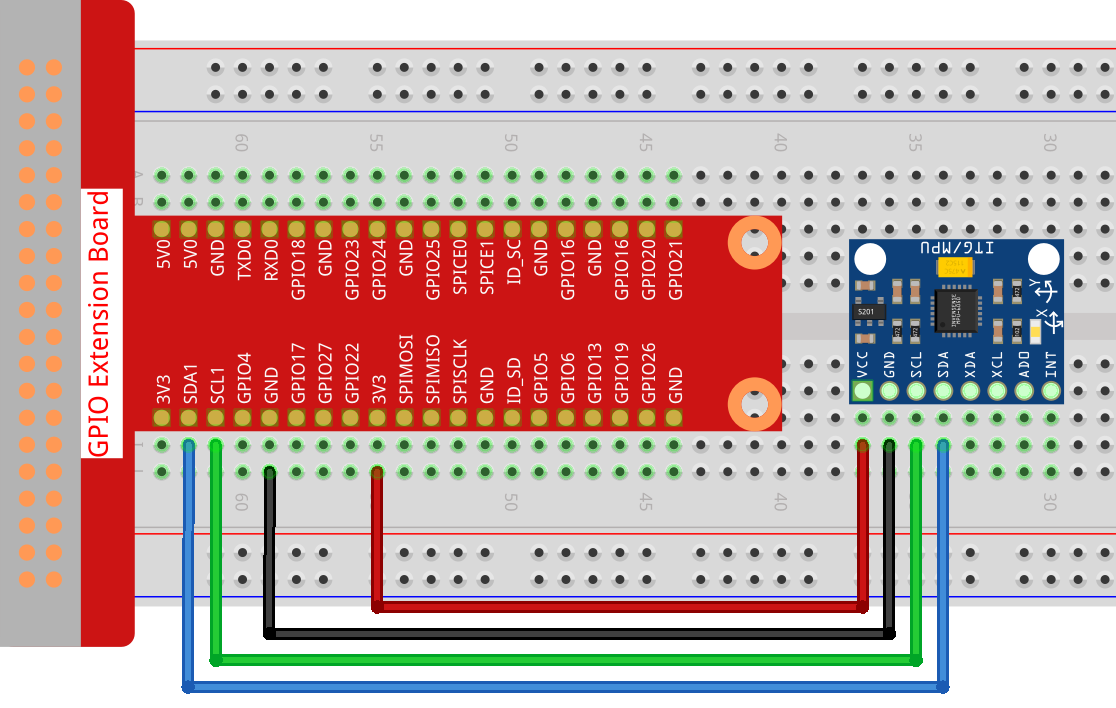
Paso 1: Construye el circuito.
Paso 2: Configura I2C (ver Apéndice Configuración de I²C. Si ya has configurado I2C, omite este paso).
Paso 3: Ve a la carpeta del código.
cd ~/raphael-kit/nodejs/
Paso 4: Instala las dependencias.
sudo npm install mpu6050-gyro
Paso 5: Ejecuta el código.
sudo node mpu6050_module.js
Una vez ejecutado el código, se imprimirá en la pantalla el ángulo de desviación de los ejes x e y, así como la aceleración y la velocidad angular en cada eje leídos por el MPU6050 después de ser calculados.
Código
var gyro = require("mpu6050-gyro");
var address = 0x68; //MPU6050 address
var bus = 1; //i2c bus used
var gyro = new gyro( bus,address );
async function update_telemetry() {
var gyro_xyz = gyro.get_gyro_xyz();
var accel_xyz = gyro.get_accel_xyz();
var gyro_data = {
gyro_xyz: gyro_xyz,
accel_xyz: accel_xyz,
rollpitch: gyro.get_roll_pitch( gyro_xyz, accel_xyz )
}
console.log(gyro_data);
setTimeout(update_telemetry, 500);
}
if ( gyro ) {
update_telemetry();
}
Explicación del Código
var gyro = require("mpu6050-gyro");
var address = 0x68; //MPU6050 address
var bus = 1; //i2c bus used
var gyro = new gyro( bus,address );
Importa el módulo mpu6050-gyro, determina la dirección del MPU6050 y el bus, y crea el objeto gyro,
lo que facilita llamar a las funciones encapsuladas en el módulo.
Nota
Sobre este módulo, por favor refiérase a: https://www.npmjs.com/package/mpu6050-gyro
var gyro_xyz = gyro.get_gyro_xyz();
var accel_xyz = gyro.get_accel_xyz();
var gyro_data = {
gyro_xyz: gyro_xyz,
accel_xyz: accel_xyz,
rollpitch: gyro.get_roll_pitch(gyro_xyz, accel_xyz)
}
console.log(gyro_data);
setTimeout(update_telemetry, 500);
El módulo encapsula tres funciones disponibles:
gyro.get_gyro_xyz(): Devuelve un objeto JSON con los datos brutos x, y, z del giroscopio.
gyro.get_accel_xyz(): Devuelve un objeto JSON con los datos brutos x, y, z del acelerómetro.
gyro.get_roll_pitch(gyro_xyz, accel_xyz): Devuelve un objeto JSON con el ángulo de balanceo e inclinación en grados.
Imagen del Fenómeno
