Nota
Hola, ¡bienvenido a la Comunidad de Entusiastas de SunFounder Raspberry Pi & Arduino & ESP32 en Facebook! Sumérgete más en Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte Experto: Resuelve problemas post-venta y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprender y Compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Preestrenos Exclusivos: Obtén acceso anticipado a nuevos anuncios de productos y adelantos exclusivos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más nuevos.
Promociones Festivas y Sorteos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
1.3.2 Servo
Introducción
En este proyecto, aprenderemos cómo hacer girar el servo.
Componentes Necesarios
En este proyecto, necesitamos los siguientes componentes.
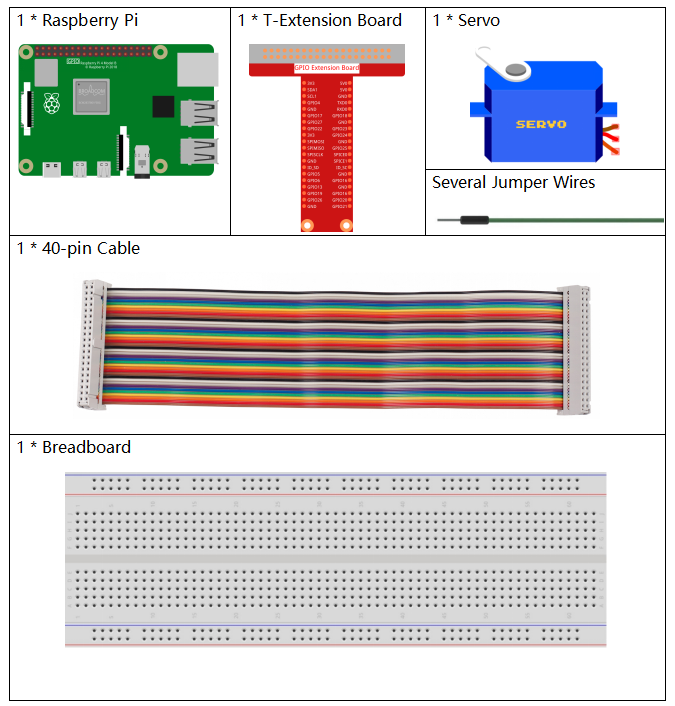
Es definitivamente conveniente comprar un kit completo, aquí está el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Raphael |
337 |
También puedes comprarlos por separado en los enlaces a continuación.
INTRODUCCIÓN DE COMPONENTES |
ENLACE DE COMPRA |
|---|---|
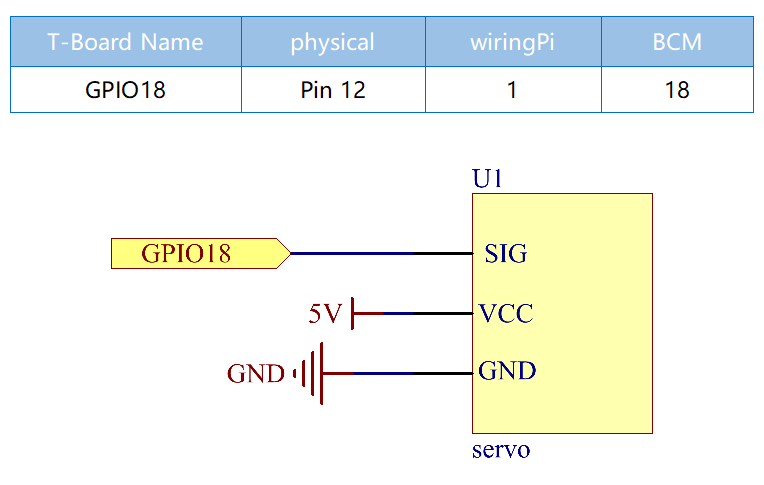
Diagrama Esquemático
Procedimientos Experimentales
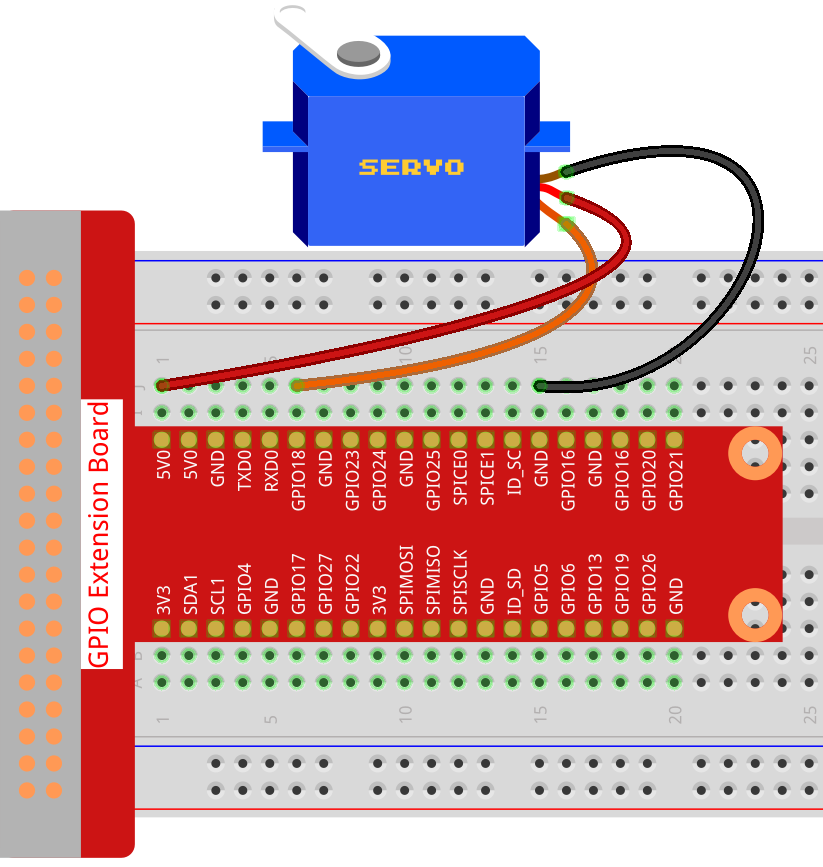
Paso 1: Construye el circuito.
Paso 2: Ve a la carpeta del código.
cd ~/raphael-kit/nodejs/
Paso 3: Ejecuta el código.
sudo node servo.js
Después de ejecutar el programa, el servo girará de 0 grados a 180 grados, y luego de 180 grados a 0 grados, de forma circular.
Código
const Gpio = require('pigpio').Gpio;
SERVO_MIN_ANGLE = 0
SERVO_MAX_ANGLE = 180
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
ServoPin = new Gpio(18,{mode: Gpio.OUTPUT})
function map(value, inMin, inMax, outMin, outMax){
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
}
function angle2pulse(angle){
return Math.floor(map(angle,SERVO_MIN_ANGLE,SERVO_MAX_ANGLE,SERVO_MIN_PULSE ,SERVO_MAX_PULSE))
}
let angle=90;
let step=5;
setInterval(() => {
if(angle>=180||angle<=0){
step=-step
}
angle+=step;
ServoPin.servoWrite(angle2pulse(angle));
}, 20);
Explicación del Código
const Gpio = require('pigpio').Gpio;
ServoPin = new Gpio(18,{mode: Gpio.OUTPUT})
Importa el módulo pigpio y crea un objeto de la clase Gpio, ServoPin, para controlar la salida del Gpio18.
SERVO_MIN_ANGLE = 0
SERVO_MAX_ANGLE = 180
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
function map(value, inMin, inMax, outMin, outMax){
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
}
function angle2pulse(angle){
return Math.floor(map(angle,SERVO_MIN_ANGLE,SERVO_MAX_ANGLE,SERVO_MIN_PULSE ,SERVO_MAX_PULSE))
}
Aquí se define la función que mapea el ángulo al ancho del pulso.
Esto es porque la función de control del servo servoWrite(pulseWidth) encapsulada en la clase Gpio necesita escribir el ancho del pulso en lugar del ángulo.
El rango de ángulo del servo que usamos es de 0 a 180, que necesita ser mapeado al rango de pulseWidth, de 500 a 2500.
let angle=90;
let step=5;
setInterval(() => {
if(angle>=180||angle<=0){
step=-step
}
angle+=step;
ServoPin.servoWrite(angle2pulse(angle));
}, 20);
Deja que el ángulo del servo se desvíe de ida y vuelta de 0 a 180.
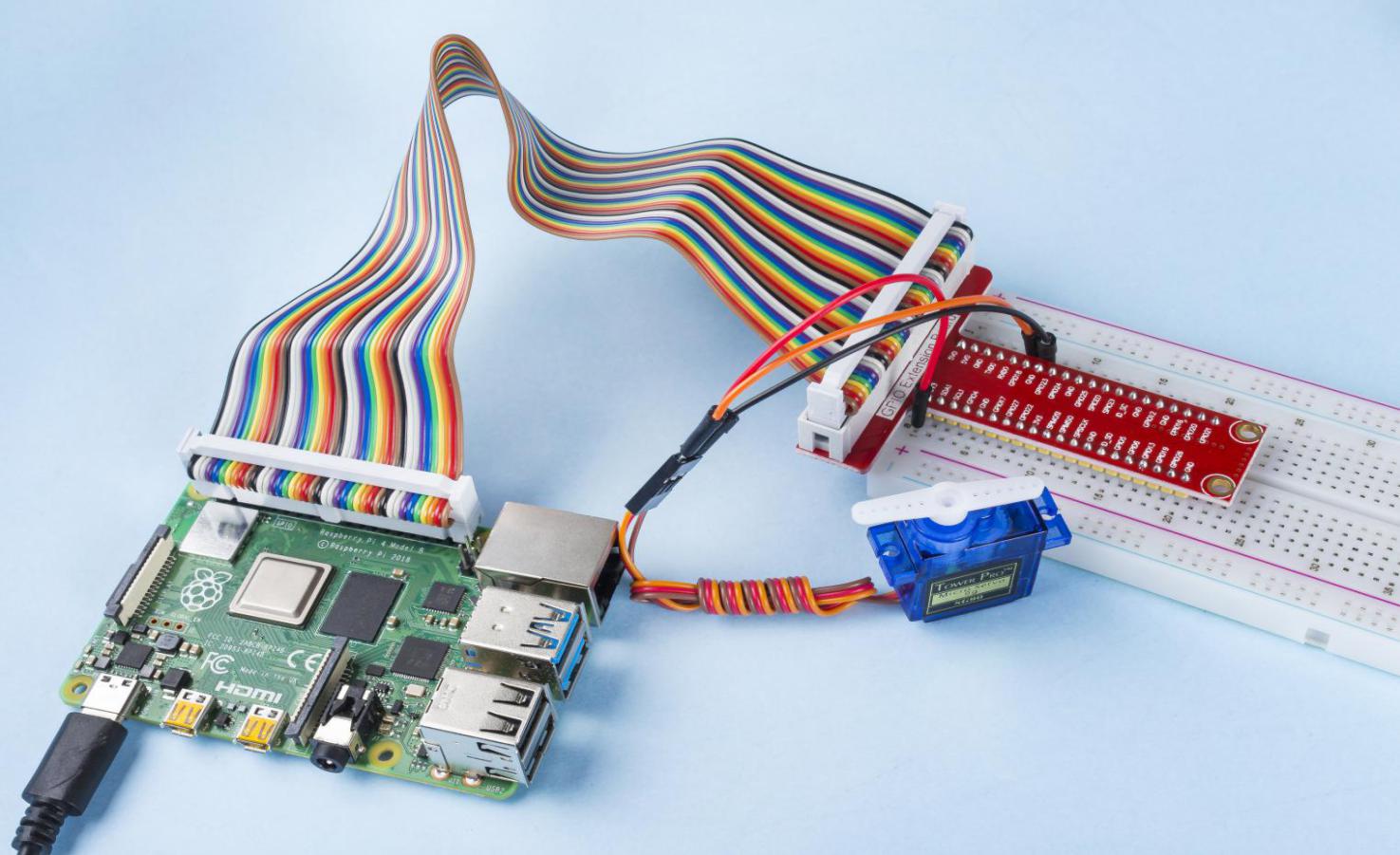
Imagen del Fenómeno