Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
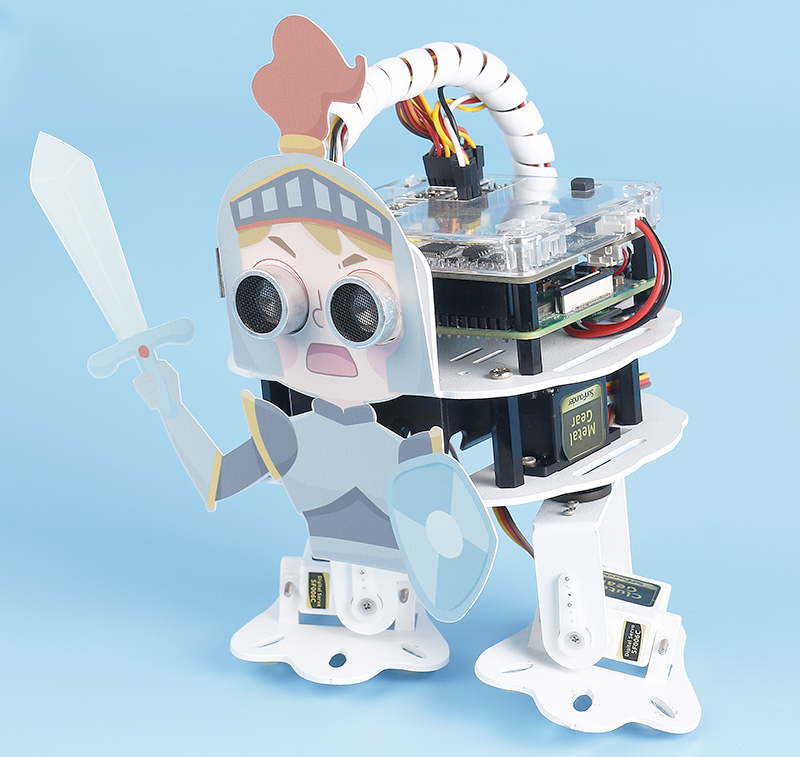
Let’s Fight! Warrior!¶
Here, PiSloth is a brave warrior, when it appears in front of the enemy, it will let out a roar and rush to the enemy.
Note
You can download and print the PDF Cartoon Mask for your PiSloth.
Run the Code
cd ~/pisloth/examples
sudo python3 lets_fight.py
After the code is run, PiSloth will continuously detect the distance of the obstacle, when the distance is between 5 and 40, PiSloth will make a roaring sound and rush forward; when the distance of the obstacle is less than 5, PiSloth will stop.
Code
Note
You can Modify/Reset/Copy/Run/Stop the code below. But before that, you need to go to source code path like pisloth\examples. After modifying the code, you can run it directly to see the effect.
from pisloth import Sloth
from robot_hat import Music
from robot_hat import Ultrasonic
from robot_hat import Pin
import time
import os
music = Music()
sloth = Sloth([1,2,3,4])
sloth.set_offset([0,0,0,0])
sonar = Ultrasonic(Pin("D2") ,Pin("D3"))
alert_distance = 40
contact_distance = 5
def main():
distance = sonar.read()
if distance <= alert_distance and distance >= contact_distance :
try:
music.sound_effect_play('./sounds/battle.wav')
music.background_music('./musics/attack.mp3')
music.music_set_volume(20)
except Exception as e:
print(e)
while True:
distance = sonar.read()
print(distance)
if distance < 0:
continue
if distance <= contact_distance:
break
sloth.do_action('forward', 1,90)
sloth.do_action('stand', 1, 90)
time.sleep(1)
if __name__ == "__main__":
while True:
main()
How it works?
Here is the main program.
Read the
distancedetected by ultrasonic module and filter out the values less than 0 (When the ultrasonic module is too far from the obstacle or cannot read the data correctly,distance<0will appear).When the
distanceis between 5 and 40, PiSloth will playwarning.wavandattack.mp3and moveforward.When the
distanceis less than 5, PiSloth will keep thestandposition.
distance = sonar.read()
if distance <= alert_distance and distance >= contact_distance :
try:
music.sound_effect_play('./sounds/battle.wav')
music.background_music('./musics/attack.mp3')
music.music_set_volume(20)
except Exception as e:
print(e)
while True:
distance = sonar.read()
print(distance)
if distance< 0:
continue
if distance<=contact_distance:
break
sloth.do_action('forward', 1,95)
sloth.do_action('stand', 1, 90)
time.sleep(1)
Note
You can add different sound effects or music to musics or sounds folder via Filezilla Software.