Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Custom Step¶
In the previous projects, we used a lot of actions that we wrote, so how are these actions composed and done? Generally speaking, an action is composed of one or more steps.
In this project, we will learn how to customize PiSloth’s step.
Note
You can download and print the PDF Cartoon Mask for your PiSloth.
Run the Code
cd ~/pisloth/examples
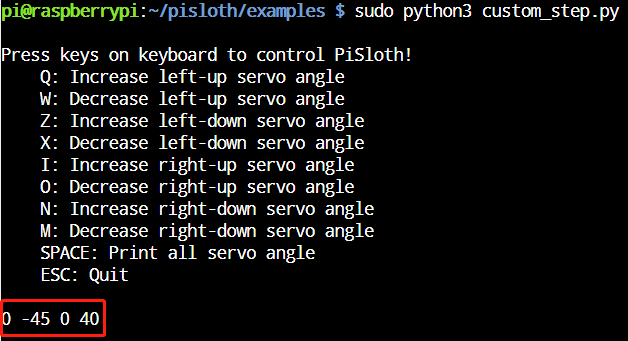
sudo python3 custom_step.py
Once the code has been run, press the following keys to adjust the angle of each servo of PiSloth.
q: Increase the angle of the left leg
w: Decrease the angle of the left leg
z: Increase the angle of the left foot
x: Decreases the angle of the left foot
i: Increase the angle of the right leg
o: decreases the angle of the right leg
n: increases the angle of the right foot
m: decreases the angle of the right foot
SPACE: Print all angle
ESC: exit
For example, by pressing the zx and nm keys, we make PiSloth do the pose shown in the figure.

Press the key SPACE to print the angle of the 4 servos at this time. You need to record these angle values, which will be used in the next project Custom Action.
Code
Note
You can Modify/Reset/Copy/Run/Stop the code below. But before that, you need to go to source code path like pisloth\examples. After modifying the code, you can run it directly to see the effect.
from pisloth import Sloth
# from robot_hat import Music
# from robot_hat import TTS
from robot_hat import PWM
from robot_hat import Servo
import sys
import tty
import termios
import time
sloth = Sloth([1,2,3,4])
# tts = TTS()
# music = Music()
sloth.set_offset([0,0,0,0])
right_leg_servo = Servo(PWM('P0'))
right_foot_servo = Servo(PWM('P1'))
left_leg_servo = Servo(PWM('P2'))
left_foot_servo = Servo(PWM('P3'))
def readchar():
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
try:
tty.setraw(sys.stdin.fileno())
ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
manual = '''
Press keys on keyboard to control PiSloth!
q: Increase the servo angle of the left leg
w: Decrease the servo angle of the left leg
z: Increase the servo angle of the left foot
x: Decrease the servo angle of the left foot
i: Increase the servo angle of the right leg
o: Decrease the servo angle of the right leg
n: Increase the servo angle of the right foot
m: Decrease the servo angle of the right foot
SPACE: Print all angle
ESC: Quit
'''
def main():
print(manual)
left_leg=0
left_foot=0
right_leg=0
right_foot=0
while True:
key = readchar().lower()
# print(key)
if key == "q":
left_leg = left_leg+5
elif key == "w":
left_leg = left_leg-5
elif key == "z":
left_foot = left_foot+5
elif key == "x":
left_foot = left_foot-5
elif key == "i":
right_leg = right_leg+5
elif key == "o":
right_leg = right_leg-5
elif key == "n":
right_foot = right_foot+5
elif key == "m":
right_foot = right_foot-5
elif key == chr(32): # 32 for space
print(right_leg,right_foot,left_leg,left_foot)
elif key == chr(27): # 27 for ESC
break
right_leg_servo.angle(right_leg)
right_foot_servo.angle(right_foot)
left_leg_servo.angle(left_leg)
left_foot_servo.angle(left_foot)
# time.sleep(0.05)
print("\nQuit")
if __name__ == "__main__":
main()