Nota
Benvenuto nella community Facebook SunFounder Raspberry Pi, Arduino ed ESP32!
Ottieni supporto tecnico e aiuto nella risoluzione dei problemi.
Impara e condividi progetti, suggerimenti e tutorial.
Accedi in anteprima a nuovi prodotti e aggiornamenti.
Goditi sconti esclusivi e omaggi.
👉 Unisciti a noi qui: [here]
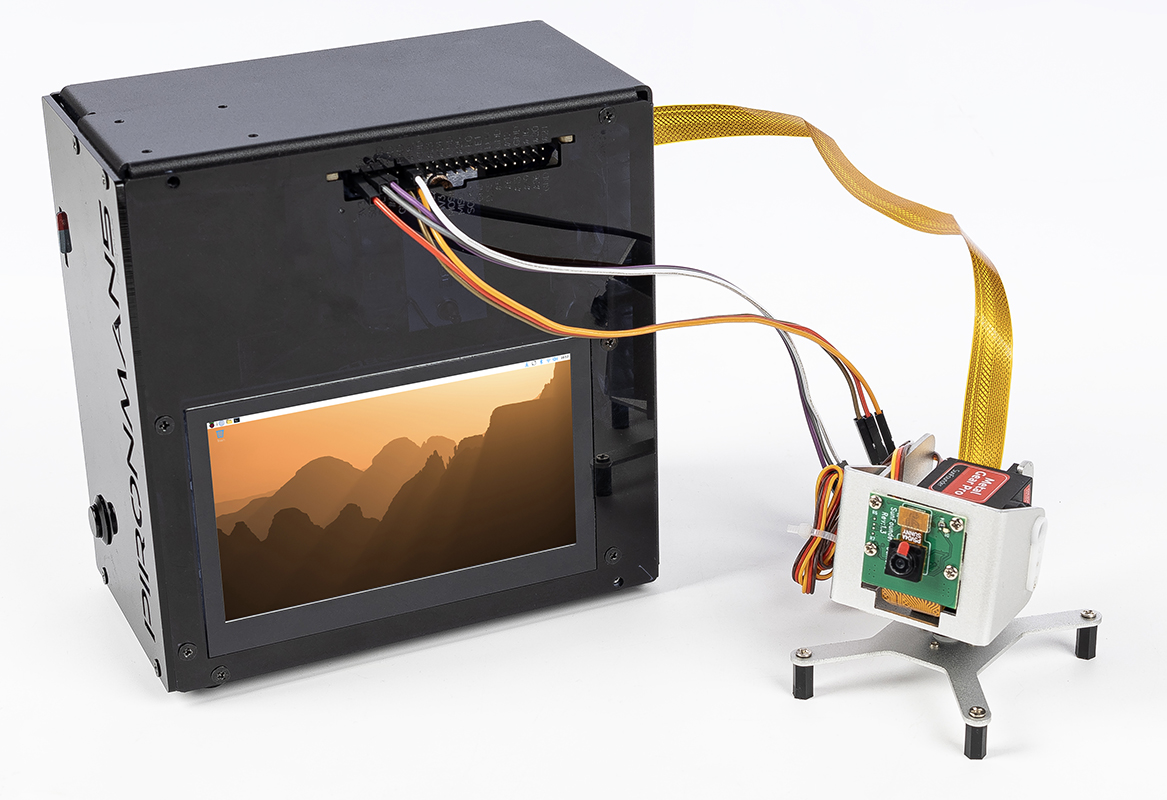
Modulo Fotocamera Pan-Tilt
Nota
La serie Pironman 5 non include un modulo fotocamera. Devi procurartene uno da solo o acquistarlo dal nostro sito web ufficiale:
In questa sezione imparerai come configurare e controllare un modulo fotocamera Pan-Tilt utilizzando due servo SG90 collegati direttamente ai pin GPIO. Alla fine di questa sezione, avrai un modulo Pan-Tilt completamente installato e funzionante, pronto per i tuoi progetti.
Collegamento Hardware
Prima di iniziare, assicurati che il tuo Raspberry Pi sia spento.
Schema di Collegamento:
Dispositivo |
Pin GPIO |
Pin Fisico |
|---|---|---|
Servo Pan (Arancione) |
GPIO17 |
Pin 11 |
Servo Tilt (Arancione) |
GPIO18 |
Pin 12 |
VCC (Rosso) |
5V |
Pin 2 o 4 |
GND (Marrone) |
GND |
Pin 6, 9, 14, 20, 25, 30, 34, 39 |
Modulo Fotocamera |
Interfaccia CSI |
Collega alla porta camera |
Avvertimento
Sebbene i servo SG90 possano assorbire energia direttamente dal pin 5V del Raspberry Pi durante i test, un uso prolungato o il movimento simultaneo di entrambi i servo potrebbe causare cali di tensione e instabilità del sistema. Per progetti a lungo termine, considera l’uso di un alimentatore esterno da 5V (assicurando una terra comune con il Raspberry Pi).
Collegamento Passo-Passo:
Collega i servo:
Collega il filo del segnale arancione del servo Pan a GPIO17 (pin fisico 11)
Collega il filo del segnale arancione del servo Tilt a GPIO18 (pin fisico 12)
Collega i fili rossi VCC di entrambi i servo a un pin 5V (pin fisico 2 o 4)
Collega i fili marroni GND di entrambi i servo a qualsiasi pin GND (es., pin fisico 6)
Collega la fotocamera:
Solleva delicatamente il fermaglio di plastica sul connettore CSI della fotocamera
Inserisci il cavo a nastro della fotocamera con i contatti metallici rivolti lontano dalla porta Ethernet
Premi il fermaglio di plastica verso il basso per fissare il cavo
Testare il Servo
Prima di eseguire l’esempio completo di Pan-Tilt, testiamo ciascun servo individualmente per assicurarci che funzionino correttamente.
1. Abilita GPIO e I2C (se necessario):
sudo raspi-config
# Naviga a: Interface Options -> I2C -> Enable
# Riavvia dopo l'abilitazione
2. Script di test semplice per servo:
Crea un file di test servo_test.py:
#!/usr/bin/env python3
# servo_test.py - Test semplice del servo
from gpiozero import Servo
import time
# Test del servo Pan su GPIO17
pan = Servo(17, min_pulse_width=0.5/1000, max_pulse_width=2.5/1000)
print("Testing Pan servo (GPIO17)...")
print("Moving to 0° position...")
pan.value = -1 # 0°
time.sleep(2)
print("Moving to 90° position...")
pan.value = 0 # 90°
time.sleep(2)
print("Moving to 180° position...")
pan.value = 1 # 180°
time.sleep(2)
pan.close()
print("Pan servo test complete")
3. Esegui il test:
python3 servo_test.py
Se il servo si muove agevolmente attraverso tutte le posizioni, ripeti il test per il servo Tilt cambiando il numero del pin in 18.
Testare la Fotocamera
1. Abilita l’interfaccia fotocamera:
sudo raspi-config
# Naviga a: Interface Options -> Camera -> Enable
# O per sistemi più recenti: Interface Options -> Legacy Camera -> Enable
sudo reboot
2. Test di acquisizione della fotocamera:
Per Raspberry Pi OS Bullseye e versioni successive (usando libcamera):
# Scatta una foto di test
libcamera-jpeg -o test.jpg -t 2000 --width 640 --height 480
# Anteprima del flusso della fotocamera
libcamera-hello -t 0
Per sistemi più vecchi (usando raspistill):
# Scatta una foto di test
raspistill -o test.jpg -t 2000 -w 640 -h 480
# Anteprima del flusso della fotocamera
raspivid -t 0
3. Verifica la foto:
ls -l test.jpg
# Apri l'immagine (se hai un'interfaccia grafica)
xdg-open test.jpg
Esempio Pan-Tilt
Ora combiniamo il controllo del servo e la funzionalità della fotocamera in un programma completo di controllo Pan-Tilt. Questo esempio ti permette di controllare la direzione della fotocamera usando i tasti WSAD e scattare foto con il tasto T.
1. Crea lo script di controllo Pan-Tilt:
nano ptz_wsad_simple.py
Copia il seguente codice:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# ptz_wsad_simple.py - Controllo PTZ con tasti WSAD, versione ultra semplice
from gpiozero import Servo
import os
from datetime import datetime
# Inizializza i servo
# Parametri SG90: larghezza impulso min 0.5ms (0°), larghezza impulso max 2.5ms (180°)
pan = Servo(17, min_pulse_width=0.5/1000, max_pulse_width=2.5/1000)
tilt = Servo(18, min_pulse_width=0.5/1000, max_pulse_width=2.5/1000)
# Posizione iniziale (centro)
pan.value = 0
tilt.value = 0
print("\n=== Controllo PTZ SG90 ===")
print("W: Su")
print("S: Giù")
print("A: Sinistra")
print("D: Destra")
print("T: Scatta foto")
print("C: Centro")
print("Q: Esci")
print("-" * 30)
def take_photo():
"""Funzione per scattare foto"""
# Crea la directory delle foto se non esiste
photo_dir = "/home/pi/Pictures/ptz"
os.makedirs(photo_dir, exist_ok=True)
# Genera nome file con timestamp
timestamp = datetime.now().strftime("%Y%m%d_%H%M%S")
filename = f"{photo_dir}/ptz_{timestamp}.jpg"
# Scatta foto usando libcamera (per Raspberry Pi Bullseye e successivi)
# Alternativa per sistemi più vecchi: usa raspistill
os.system(f"libcamera-jpeg -o {filename} -t 1 --width 640 --height 480")
# Comando alternativo per sistemi più vecchi:
# os.system(f"raspistill -o {filename} -t 1 -w 640 -h 480")
print(f"Foto salvata: {filename}")
try:
while True:
# Ricevi input dall'utente
cmd = input("Inserisci comando: ").lower().strip()
if cmd == 'w':
# Muovi su (aumenta angolo tilt)
tilt.value = min(1.0, tilt.value + 0.2)
print(f"↑ Su ({tilt.value:.1f})")
elif cmd == 's':
# Muovi giù (diminuisci angolo tilt)
tilt.value = max(-1.0, tilt.value - 0.2)
print(f"↓ Giù ({tilt.value:.1f})")
elif cmd == 'a':
# Muovi sinistra (diminuisci angolo pan)
pan.value = max(-1.0, pan.value - 0.2)
print(f"← Sinistra ({pan.value:.1f})")
elif cmd == 'd':
# Muovi destra (aumenta angolo pan)
pan.value = min(1.0, pan.value + 0.2)
print(f"→ Destra ({pan.value:.1f})")
elif cmd == 't':
# Scatta foto
take_photo()
elif cmd == 'c':
# Centra il PTZ
pan.value = 0
tilt.value = 0
print("PTZ centrato")
elif cmd == 'q':
# Esci dal programma
print("Uscita dal programma")
break
else:
print("Comando non valido, usa W/S/A/D/T/C/Q")
except KeyboardInterrupt:
print("\nProgramma interrotto dall'utente")
finally:
# Pulisci le risorse GPIO
pan.close()
tilt.close()
print("GPIO puliti")
2. Rendi eseguibile lo script:
chmod +x ptz_wsad_simple.py
3. Esegui il controller Pan-Tilt:
python3 ptz_wsad_simple.py
4. Controlla la fotocamera:
Premi W/S per inclinare su/giù
Premi A/D per panoramica sinistra/destra
Premi T per scattare una foto (salvata in /home/pi/Pictures/ptz/)
Premi C per centrare la fotocamera
Premi Q per uscire
Acquisizione Fotocamera:
Lo script usa libcamera-jpeg (per le versioni più recenti di Raspberry Pi OS) per acquisire le foto. Le foto vengono salvate automaticamente con timestamp per evitare sovrascritture.