2. APP - Car Move¶
In this project, you will learn how to adjust the car’s movement and speed using the APP.
Quick User Guide
Run the
app_2_move.pyfile under thepico_4wd_car\examples\app_controlpath.Then connect your device (phone/tablet) to
my_4wd_car.
After opening the SunFounder controller, create a new controller and then add a D-pad widget to the K area and a Throttle widget to the Q area.
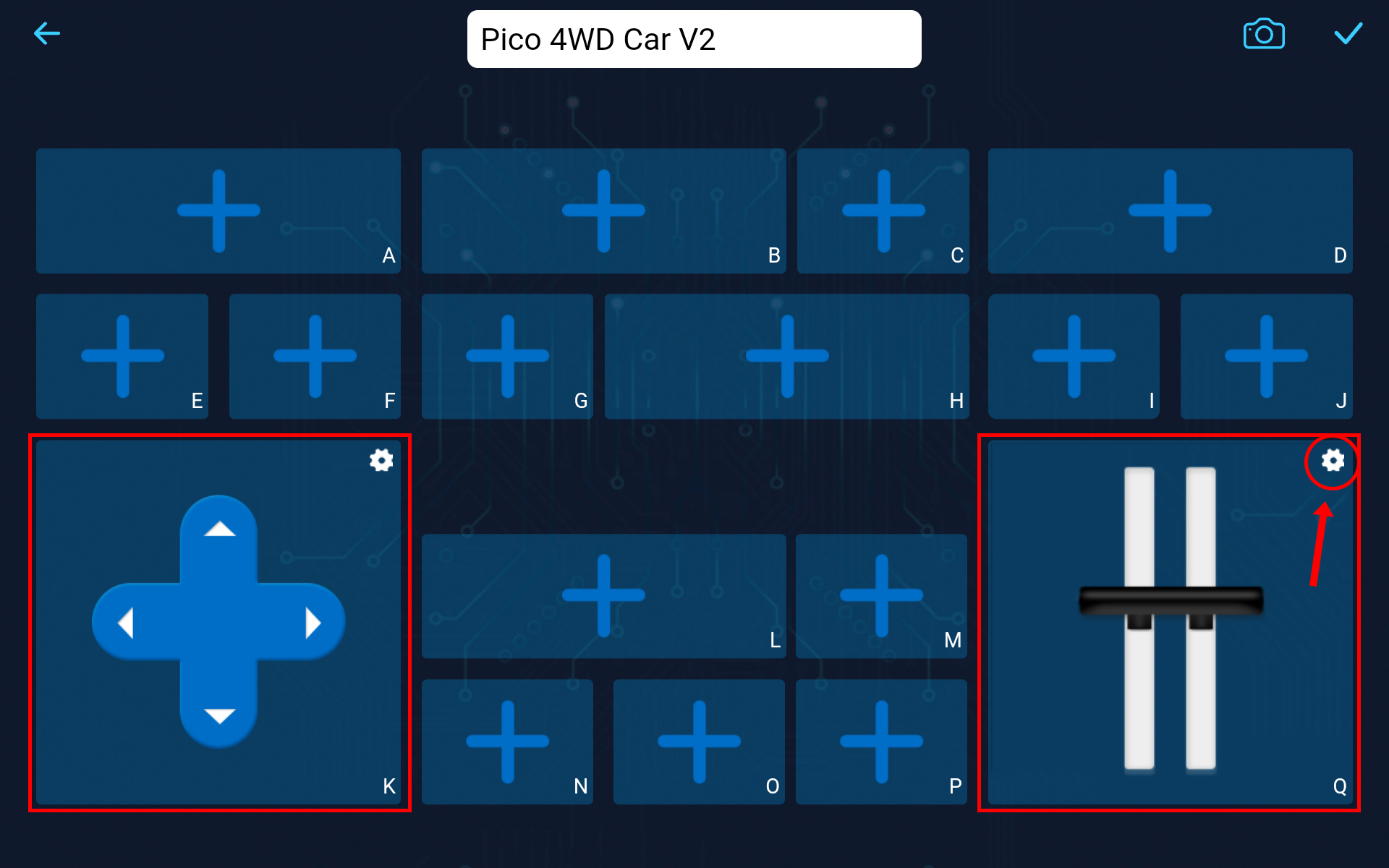
Click on the set button of the Throttle widget, change the maximum value to 100, the minimum value to 0, and the initial value to 20.

After saving (
 ) and connecting (
) and connecting ( ) the controller, click
) the controller, click  to run it.
to run it.Now, you can use the D-Pad to control the movement of the car; the Throttle widget is used to adjust the power of the car (if it is 0, the car is not moving).
How it works?
This code can be seen in several steps.
Communication-related has been explained in the previous project, so we will skip it here.
Now let’s see how to respond to the data transferred by the APP. In the
on_receive(data)function, it responds to the data from the Q and K areas to change the values ofthrottle_powerandsteer_power, which together affect the movement and turning power of the car.'''----------------- on_receive (ws.loop()) ---------------------''' def on_receive(data): global throttle_power, steer_power, dpad_touched ''' if not connected, skip & stop ''' if not ws.is_connected(): return # Move - power if 'Q' in data.keys() and isinstance(data['Q'], int): throttle_power = data['Q'] else: throttle_power = 0 # Move - direction if 'K' in data.keys(): #print(data['K']) if data['K'] == "left": dpad_touched = True if steer_power > 0: steer_power = 0 steer_power -= int(throttle_power/2) if steer_power < -100: steer_power = -100 elif data['K'] == "right": dpad_touched = True if steer_power < 0: steer_power = 0 steer_power += int(throttle_power/2) if steer_power > 100: steer_power = 100 elif data['K'] == "forward": dpad_touched = True steer_power = 0 elif data['K'] == "backward": dpad_touched = True steer_power = 0 throttle_power = -throttle_power else: dpad_touched = False steer_power = 0
throttle_power: Used to adjust the moving power of the car.steer_power: For adjusting the turning power.dpad_touched: The default isFalse,Truewhen receiving data from K area, thus making the car move.
Make the car move. The function
my_car_move()is created to convertthrottle_powerandsteer_powerto left and right motors rotation power.'''----------------- motors fuctions ---------------------''' def my_car_move(throttle_power, steer_power, gradually=False): power_l = 0 power_r = 0 if steer_power < 0: power_l = int((100 + 2*steer_sensitivity*steer_power)/100*throttle_power) power_r = int(throttle_power) else: power_l = int(throttle_power) power_r = int((100 - 2*steer_sensitivity*steer_power)/100*throttle_power) if gradually: car.set_motors_power_gradually([power_l, power_r, power_l, power_r]) else: car.set_motors_power([power_l, power_r, power_l, power_r])
Handler. The
remote_handler()function is used to execute all the code related to the actual action of the car. The role in this project is to make the car move when the D-pad is tapped.def remote_handler(): global throttle_power, steer_power, dpad_touched if dpad_touched: # The car only moves when you press the K widget my_car_move(throttle_power, steer_power, gradually=True) ''' no operation ''' if not dpad_touched: car.move('stop')