7. Line Track¶
Let Pico 4wd walk on its exclusive avenue! Tape a line on a light-colored ground (or table) with black insulating tape.
You will see Pico-4wd track the line to forward.
Warning
When pasting this line, there should be no sharp turns so that the car does not drive off the path.
Quick User Guide
Run the
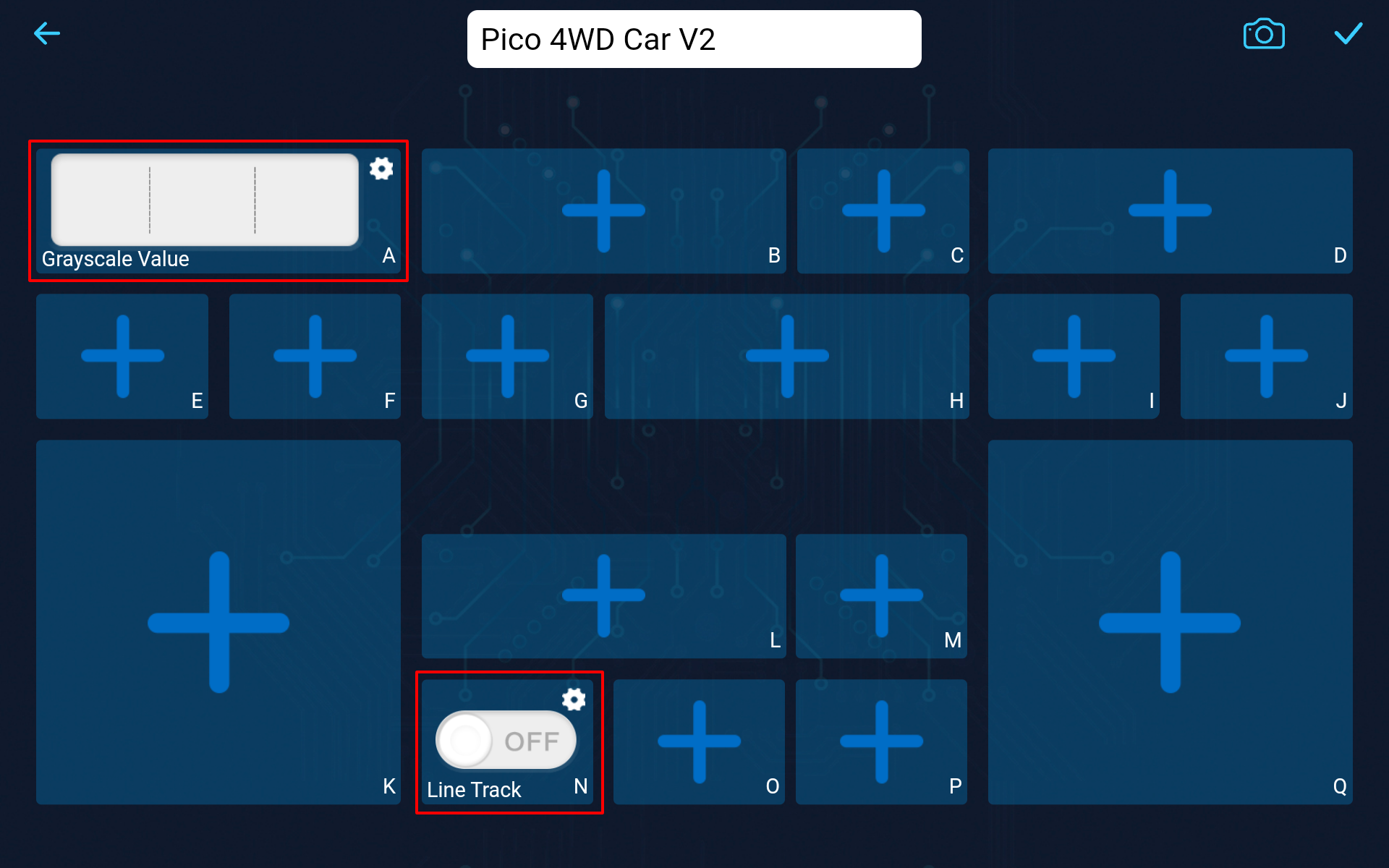
app_7_line_track.pyfile under thepico_4wd_car\examples\app_controlpath and then power on the Pico 4WD car.As shown below, create a controller that adds Grayscale Indicator and Switch widgets to A and N areas, respectively.
After saving (
 ) and connecting (
) and connecting ( ) the controller, click
) the controller, click  to run it.
to run it.While this controller is running, Grayscale Value(A) will show the values of the three grayscale sensors in real time.
Place the grayscale module in three environments: white, black and hanging in the air (10cm or more) to see how the data in the changes.
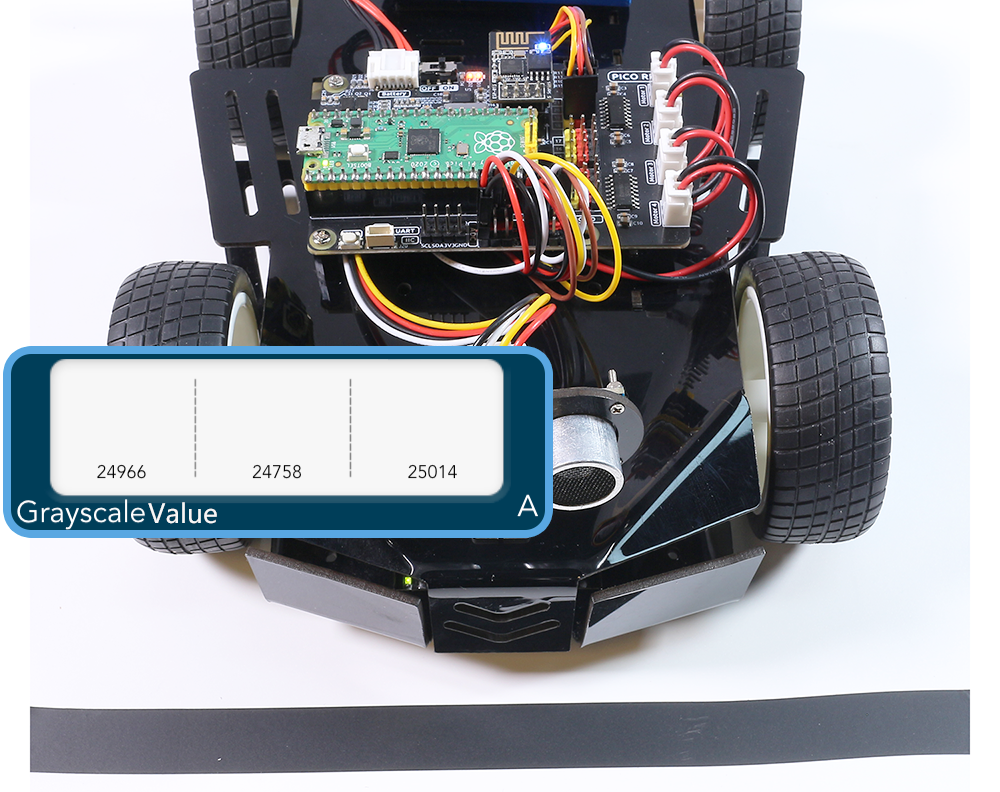
- White surface
You will find that the value of the white surface is generally large, for example mine is around 240,000.
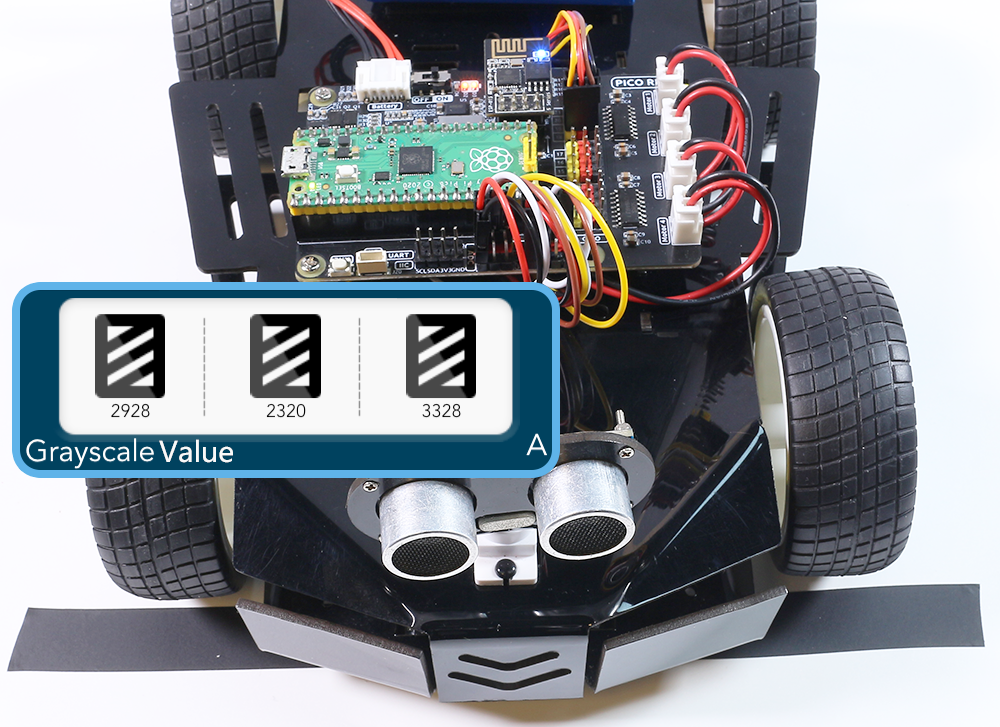
- Black line
The value on the black line will be smaller, and now I’m at about 2000.
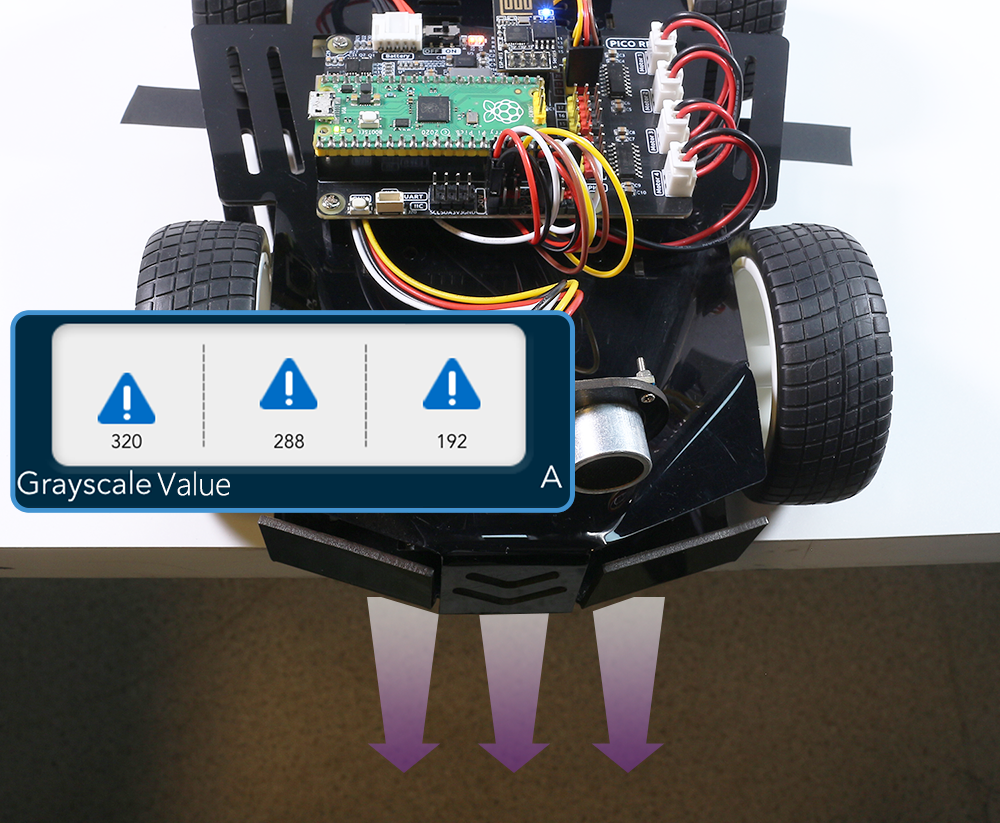
- Overhang (10cm or more)
And the value of the overhang will be even smaller, already less than 1000 in my environment.
Set the threshold value.
My car reads around 24000 in the white area and around 2000 in the black line, so I set
line_refto about the middle value of10000.In the cliff area it reads less than 1000, so I set
cliff_refto1000.Now click the
 button to enter edit mode.
button to enter edit mode.
Click on the Settings button in the upper right corner of the Grayscale Value(A) widget.
Fill in the cliff and line thresholds.

Now re-save the SunFounder Controller and toggle the Switch widget to ON. Place the car on the black line and you will see the Pico-4wd tracking line advancing.
How it works?
In
on_receive(data), the grayscale values are sent to the A area for showing and responding to the data from the N area.Send the grayscale value to area A for showing.
Then read the value of the widget in area A. If there are set thresholds, then use the set thresholds, otherwise use the default thresholds.
When the widget in area N is toggled to ON, the output value is
Trueto let Pico 4WD car switch to the line track mode.
'''----------------- on_receive (ws.loop()) ---------------------''' def on_receive(data): global mode ''' if not connected, skip & stop ''' if not ws.is_connected(): return ''' data to display''' # grayscale ws.send_dict['A'] = grayscale.get_value() # grayscale reference if 'A' in data.keys() and isinstance(data['A'], list): grayscale.set_edge_reference(data['A'][0]) grayscale.set_line_reference(data['A'][1]) else: grayscale.set_edge_reference(GRAYSCALE_CLIFF_REFERENCE_DEFAULT) grayscale.set_line_reference(GRAYSCALE_LINE_REFERENCE_DEFAULT) # mode select: if 'N' in data.keys() and data['N'] == True: if mode != 'line track': mode = 'line track' print(f"change mode to: {mode}") else: if mode != None: mode = None print(f"change mode to: {mode}")
Create a
line_track()function to move the car in different directions based on the detection result of the grayscale module.When the detected grayscale value of the corresponding channel is less than set threshold, a
1will be output, which means a black line is detected.Then all three sets of data (
[0, 1, 0]) will be output byget_line_status().Then make the car move in different directions according to the output data.
'''----------------- line_track ---------------------''' def line_track(): global line_out_time _power = LINE_TRACK_POWER gs_data = grayscale.get_line_status() #print(f"gs_data: {gs_data}, {grayscale.line_ref}") if gs_data == [0, 0, 0] or gs_data == [1, 1, 1] or gs_data == [1, 0, 1]: if line_out_time == 0: line_out_time = time.time() if (time.time() - line_out_time > 2): car.move('stop') line_out_time = 0 return else: line_out_time = 0 if gs_data == [0, 1, 0]: car.set_motors_power([_power, _power, _power, _power]) # forward elif gs_data == [0, 1, 1]: car.set_motors_power([_power, int(_power/5), _power, int(_power/5)]) # right elif gs_data == [0, 0, 1]: car.set_motors_power([_power, int(-_power/2), _power, int(-_power/2)]) # right plus elif gs_data == [1, 1, 0]: car.set_motors_power([int(_power/5), _power, int(_power/5), _power]) # left elif gs_data == [1, 0, 0]: car.set_motors_power([int(-_power/2), _power, int(-_power/2), _power]) # left plus
In
remote_handler()function, theline_track()function will be called if the line tracking mode is turned on, otherwise the car is stopped.def remote_handler(): ''' move && anti-fall ''' if mode == 'line track': line_track() ''' no operation ''' if mode == None: car.move('stop')