4. APP - LIGHT¶
Now to control the RGB boards of the Pico 4WD car.
Quick User Guide
Run the
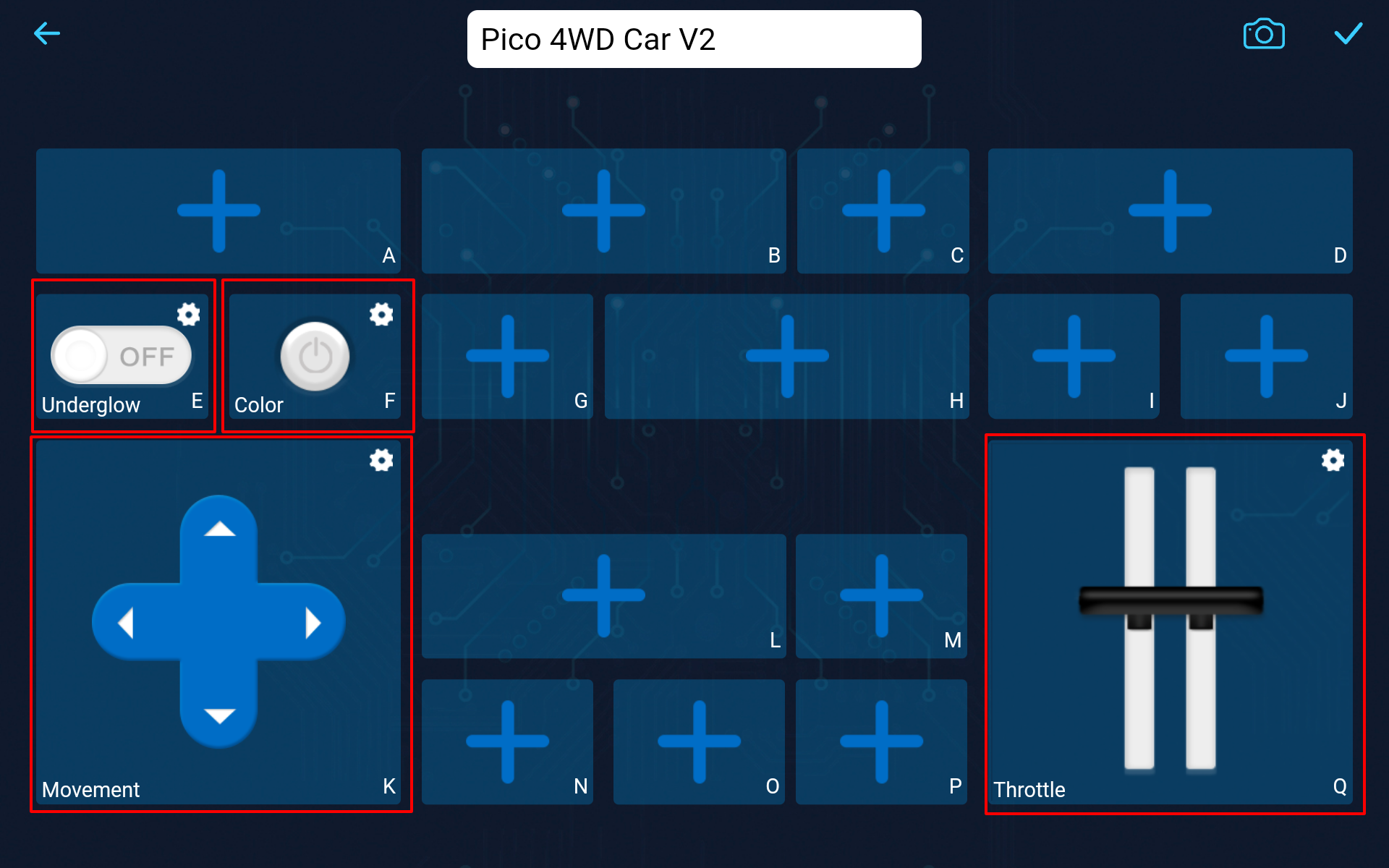
app_4_light.pyfile under thepico_4wd_car\examples\app_controlpath.Based on 2. APP - Car Move, add Button and Switch widgets to the E and F areas as shown below.
After saving (
 ) and connecting (
) and connecting ( ) the controller, click
) the controller, click  to run it.
to run it.When you use the D-pad widget to make the car move, the tail light will show the direction. The on/off and color of underglow can be controlled through the Switch and Button widgets.
How it works?
This project is based on 2. APP - Car Move with the addition of lighting effects.
Here, a total of three lighting effects are added and called in
remote_handler().def remote_handler(): global throttle_power, steer_power, move_status, dpad_touched if dpad_touched: my_car_move(throttle_power, steer_power, gradually=True) ''' no operation ''' if not dpad_touched: move_status = "stop" car.move('stop') # ''' Bottom Lights ''' bottom_lights_handler() # ''' Singal lights ''' singal_lights_handler() # ''' Brake lights ''' brake_lights_handler()
bottom_lights_handler(): Controls the on/off and colors of the two RGB boards at the bottom.singal_lights_handler(): Control the left and right RGB LEDs of the rear RGB board, for example, when the car turns left, make the left two LEDs of the rear RGB board light up, and the same for the turn right.brake_lights_handler(): Controls the tail RGB board to light up red in breathing mode when the car stops or brakes.
About
singal_lights_handler()function.When
leftis received, make the left two LEDs of the rear RGB board light up orange (singal_on_color).When
rightis received, make the right two LEDs of the rear RGB board light up orange (singal_on_color).Otherwise, let the left and right LEDs are off (
0x000000).
def singal_lights_handler(): if move_status == 'left': lights.set_rear_left_color(singal_on_color) lights.set_rear_right_color(0x000000) elif move_status == 'right': lights.set_rear_left_color(0x000000) lights.set_rear_right_color(singal_on_color) else: lights.set_rear_left_color(0x000000) lights.set_rear_right_color(0x000000)
About
brake_lights_handler()function.When
stopis received, let the RGB board on the tail light up red(brake_on_color) in breathing mode(The brightness slowly goes from bright to dark and dark to bright.).def brake_lights_handler(): global is_move_last , brake_light_status, brake_light_time, led_status, brake_light_brightness global brake_light_brightness, brake_light_brightness_flag if move_status == 'stop': if brake_light_brightness_flag == 1: brake_light_brightness += 5 if brake_light_brightness > 255: brake_light_brightness = 255 brake_light_brightness_flag = -1 elif brake_light_brightness_flag == -1: brake_light_brightness -= 5 if brake_light_brightness < 0: brake_light_brightness = 0 brake_light_brightness_flag = 1 brake_on_color = [brake_light_brightness, 0, 0] lights.set_rear_color(brake_on_color) else: if is_move_last: lights.set_rear_middle_color(0x000000) else: lights.set_rear_color(0x000000) is_move_last = True brake_light_brightness = 255
About
bottom_lights_handler()function.The variable
led_statusisTruewhen the widget in the E area is ON, which causes the bottom two RGB boards to light up in a specific color.This specific color is selected from the array (
led_theme[]) by tapping on the widget in the F area.
def bottom_lights_handler(): global led_status if led_status: color = list(led_theme[str(led_theme_code)]) else: color = [0, 0, 0] lights.set_bottom_color(color)
And the
on_receive(data)function also has some changes based on 2. APP - Car Move.When you tap the D-apd buttons, the return
left,right,forwardorbackwardwill cause the variablemove_statusto change simultaneously.This will allow the 3 RGB boards to display different effects as the car move.
def on_receive(data): global throttle_power, steer_power, move_status, dpad_touched global led_status, led_theme_code, led_theme_sum ''' if not connected, skip & stop ''' if not ws.is_connected(): return # Move - power if 'Q' in data.keys() and isinstance(data['Q'], int): throttle_power = data['Q'] else: throttle_power = 0 # Move - direction if 'K' in data.keys(): #print(data['K']) if data['K'] == "left": dpad_touched = True move_status = 'left' if steer_power > 0: steer_power = 0 steer_power -= int(throttle_power/2) if steer_power < -100: steer_power = -100 elif data['K'] == "right": dpad_touched = True move_status = 'right' if steer_power < 0: steer_power = 0 steer_power += int(throttle_power/2) if steer_power > 100: steer_power = 100 elif data['K'] == "forward": dpad_touched = True move_status = 'forward' steer_power = 0 elif data['K'] == "backward": dpad_touched = True move_status = 'backward' steer_power = 0 throttle_power = -throttle_power else: dpad_touched = False move_status = 'stop' steer_power = 0 if throttle_power == 0: move_status = 'stop'
In addition, the
on_receive(data)function also responds to widgets in the E and F areas.The widget in the E area is used to turn on/off the bottom RGB boards, while the widget in the F area is used to change colors.
Assign the return value of the E area widget to the variable
led_status.If
led_statusisTrue(the widget in the E area is toggled ON), then determine if the widget in the F area is tapped.If so, switch to the next color in the array
led_theme[].
def on_receive(data): global throttle_power, steer_power, move_status, dpad_touched global led_status, led_theme_code, led_theme_sum ''' if not connected, skip & stop ''' if not ws.is_connected(): return ... ... # LEDs switch if 'E' in data.keys(): led_status = data['E'] if led_status: # LEDs color theme change if 'F' in data.keys() and data['F'] == True: led_theme_code = (led_theme_code + 1) % led_theme_sum print(f"set led theme color: {led_theme_code}, {led_theme[str(led_theme_code)][0]}")