8. APP - Follow¶
In this project, Pico-4wd car will follow the object in front of it. For example, if you put your hand in front of Pico 4WD, it will rush towards your hand. And it will also play the advantage of sonar scanning, will judge your hand position and then adjust the forward direction.
Quick User Guide
Run the
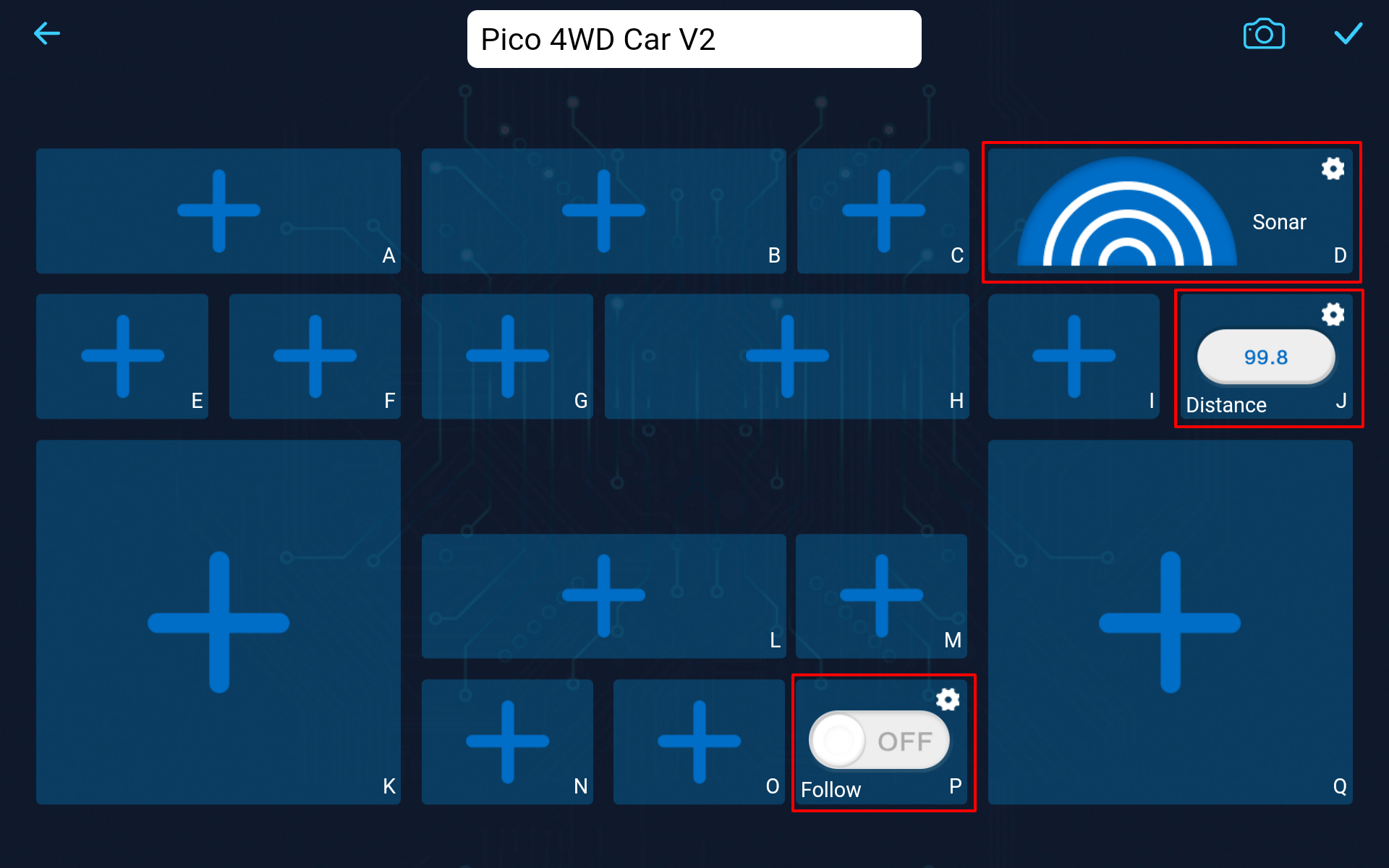
app_9_avoid.pyfile under thepico_4wd_car\examples\app_controlpath and then power on the Pico 4WD car.As shown below, create a controller that adds Radar, Number, and Button widgets to the D, J, and P areas, respectively.
After saving (
 ) and connecting (
) and connecting ( ) the controller, click
) the controller, click  to run it.
to run it.The car will follow your hand forward when you toggle the Switch widget in the P area to ON.
How it works?
In
on_receive(data), the distances and angles are sent to the D and J areas for showing, then responding to the data from the P area.def on_receive(data): global mode ''' if not connected, skip & stop ''' if not ws.is_connected(): return ''' data to display''' # # sonar and distance ws.send_dict['D'] = [sonar_angle, sonar_distance] ws.send_dict['J'] = sonar_distance # mode select: if 'P' in data.keys() and data['P'] == True: if mode != 'follow': mode = 'follow' print(f"change mode to: {mode}") else: if mode != None: mode = None print(f"change mode to: {mode}")
Write the
follow()andget_dir()functions to make the car go in a different direction based on the sonar detection.Note
The explanation of the
get_dir()function can be found in 3. Objects Follow.'''------- get_dir (sonar sacn data to direction) ---------------------''' def get_dir(sonar_data, split_str="0"): # get scan status of 0, 1 sonar_data = [str(i) for i in sonar_data] sonar_data = "".join(sonar_data) # Split 0, leaves the free path paths = sonar_data.split(split_str) # Calculate where is the widest max_paths = max(paths) if split_str == "0" and len(max_paths) < 4: return "left" elif split_str == "1" and len(max_paths) < 2: return "stop" # Calculate the direction of the widest pos = sonar_data.index(max_paths) pos += (len(max_paths) - 1) / 2 delta = len(sonar_data) / 3 if pos < delta: return "left" elif pos > 2 * delta: return "right" else: return "forward" '''----------------- follow ---------------------''' def follow(): global sonar_angle, sonar_distance sonar.set_sonar_scan_config(FOLLOW_SCAN_ANGLE, FOLLOW_SCAN_STEP) sonar.set_sonar_reference(FOLLOW_REFERENCE) #--------- scan ----------- sonar_angle, sonar_distance, sonar_data = sonar.sonar_scan() # time.sleep(0.02) # If sonar data return a int, means scan not finished, and the int is current angle status if isinstance(sonar_data, int): return #---- analysis direction ----- direction = get_dir(sonar_data, split_str='1') #--------- move ------------ if direction == "left": car.move("left", FOLLOW_TURNING_POWER) elif direction == "right": car.move("right", FOLLOW_TURNING_POWER) elif direction == "forward": car.move("forward", FOLLOW_FORWARD_POWER) else: car.move("stop")
In
remote_handler()function, thefollow()function will be called if the follow mode is turned on, otherwise the car is stopped.def remote_handler(): ''' follow hand ''' if mode == 'follow': follow() ''' no operation ''' if mode == None: car.move('stop')