Obstacle Avoid¶
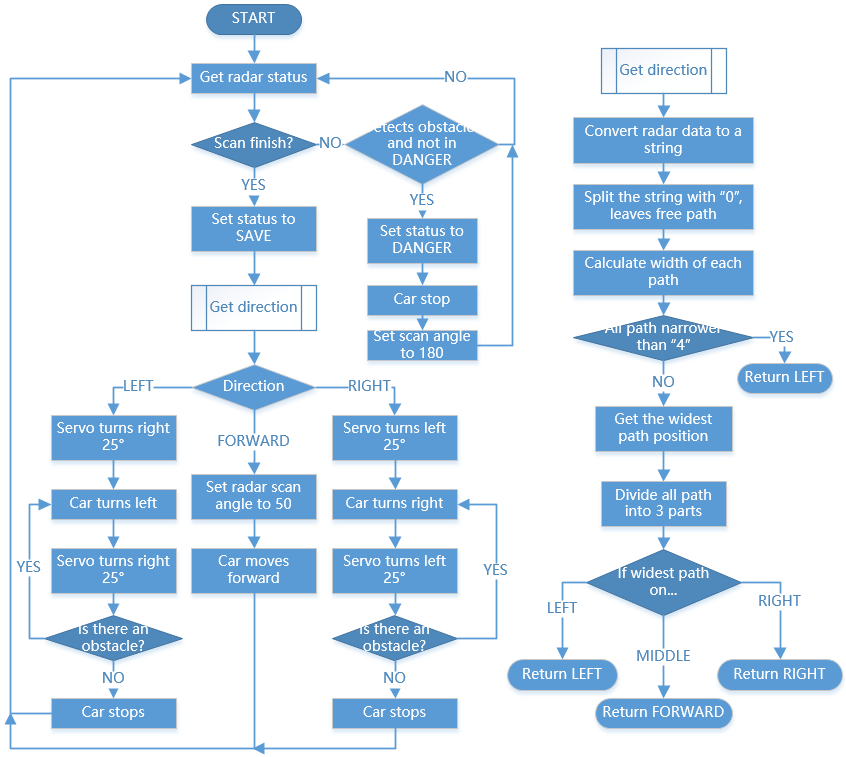
Let Pico-4wd do a challenging task: automatically avoid obstacles! When an obstacle is detected, instead of simply backing up, the radar scans the surrounding area and finds the widest way to move forward.
How to do?
Open the
obstacle_avoid.pyfile under the path ofpico_4wd_car_main\examples.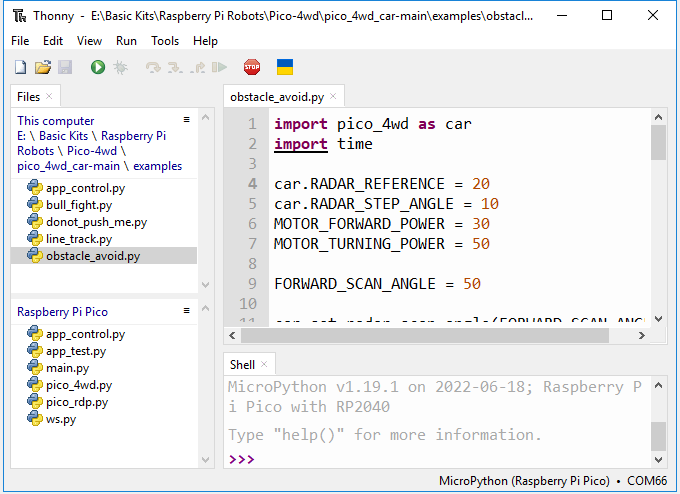
Click File -> Save as or press
Ctrl+Shift+Sto savedonot_push_me.pyto the Raspberry Pi Pico asmain.py.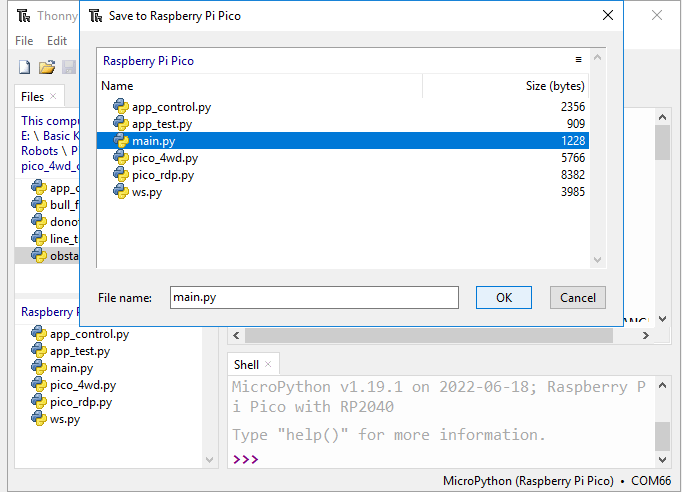
Unplug the USB cable and turn on the power switch. When you place it on the ground, it avoids the obstacles and keeps going.
How it Works?