Motor Calibration¶
Because of assembly methods and other reasons, your motor may still need a calibration direction. Otherwise, when the car moves forward, it may turn left, turn right, or even go backwards. Please follow the following steps to complete the calibration.
How to do?
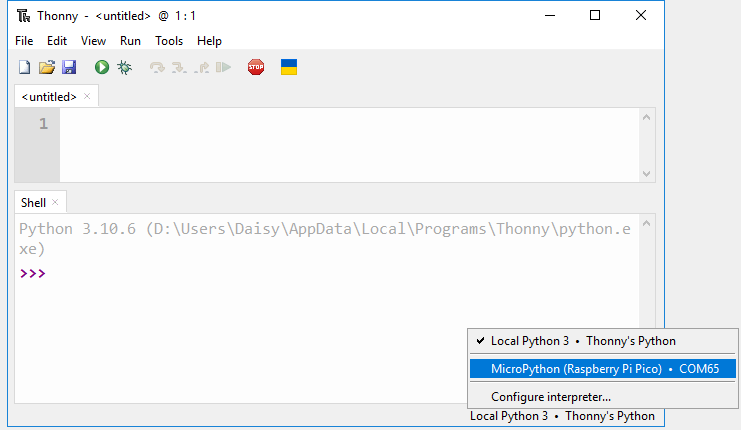
Select Correct Interpreter. Plug the Pico into your computer with a micro USB cable and select the “MicroPython (Raspberry Pi Pico).COMXX” interpreter in the bottom right corner.
Go to the
pico_4wd_car/examplespath and double click onmove_forward.pyto open it. This is a very simple example, which will let the car go forward.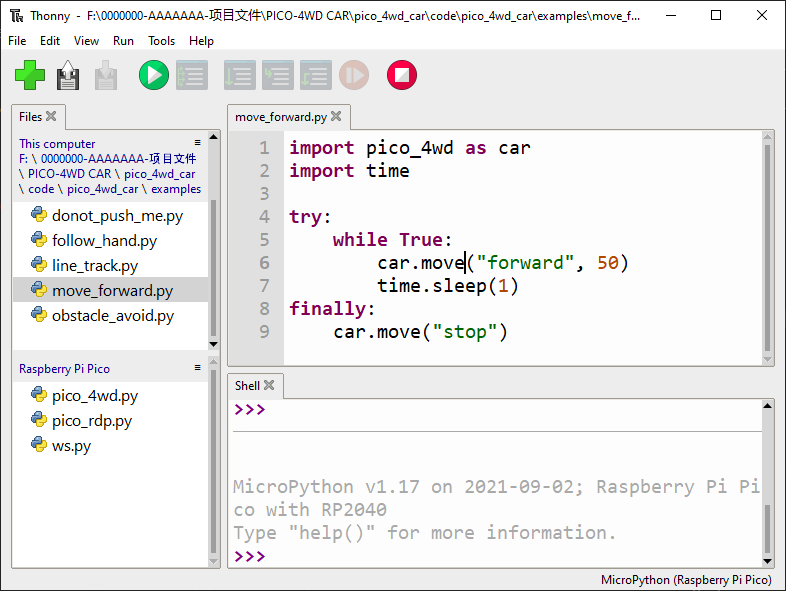
Observe whether the wheels of the car are driving forward and marked the wrong motor.
Open the
pico_4wd.pyfile that was uploaded to the pico before, modify the wrong motor’sdirto reverse the value and save it.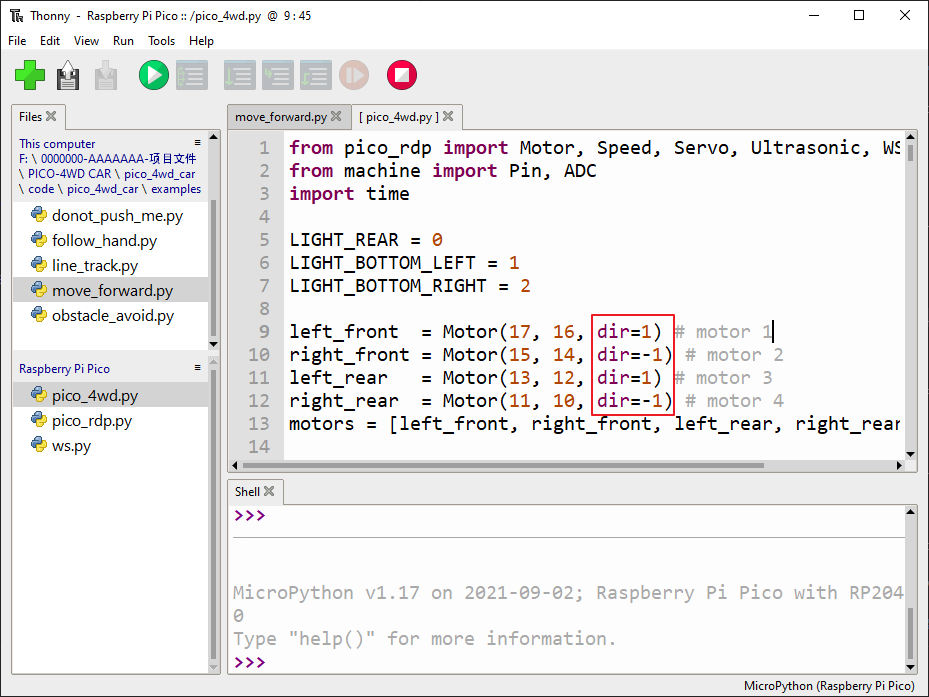
Run again
move_forward.py, if the car is driving correctly, the calibration is completed.