Line Track¶
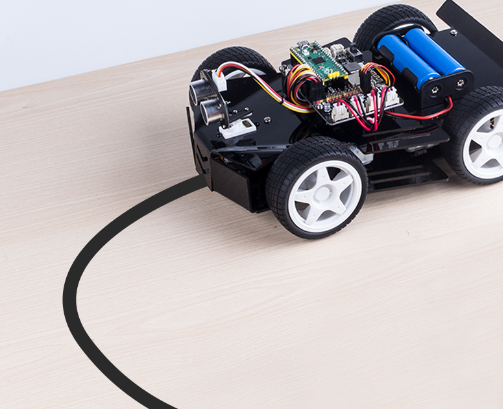
Let Pico-4wd walk on its exclusive avenue! Tape a line on a light-colored ground (or table) with black insulating tape. Run this script and you will see Pico-4wd track the line to forward.
Warning
When pasting this line, there should be no sharp turns so that the car does not drive off the path.
How to do?
Open the
line_track.pyfile under the path ofpico_4wd_car_main\examples.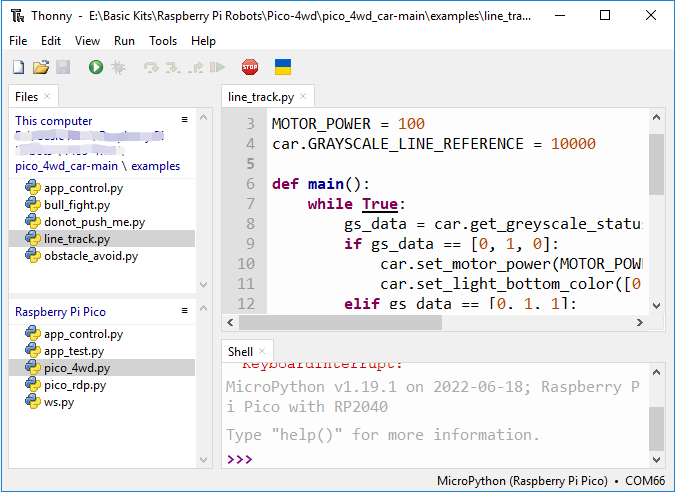
The following value should be modified based on the results of the Test the Grayscale Sensor Module section. It should be between the values of black and white surfaces. For example, in my tests, black surfaces generally around 3000 and white surfaces are around 20000, so 10000 is the appropriate threshold value. According to the actual situation, you can modify it to other values according to the actual situation.
car.GRAYSCALE_LINE_REFERENCE = 10000
Click File -> Save as or press
Ctrl+Shift+S, and then select Raspberry Pi Pico in the popup window that appears.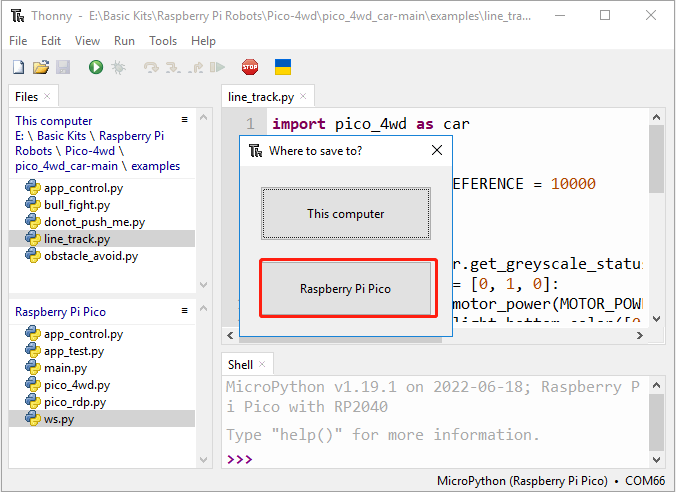
Set the file name to
main.py. If you already have themain.pyfile in your Pico, it will prompt to overwrite themain.pyfile.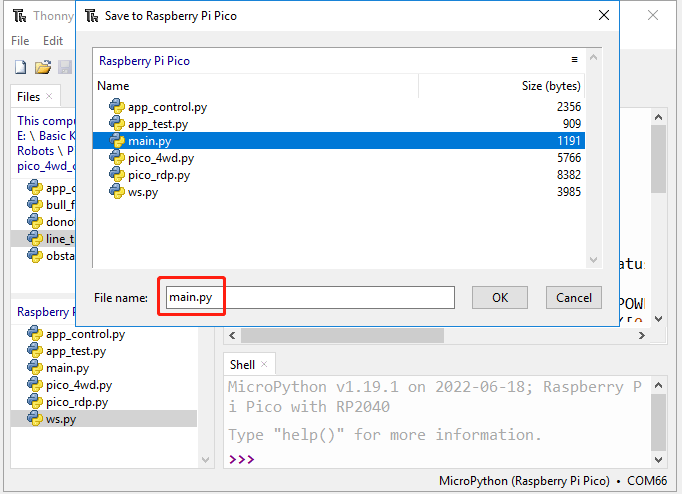
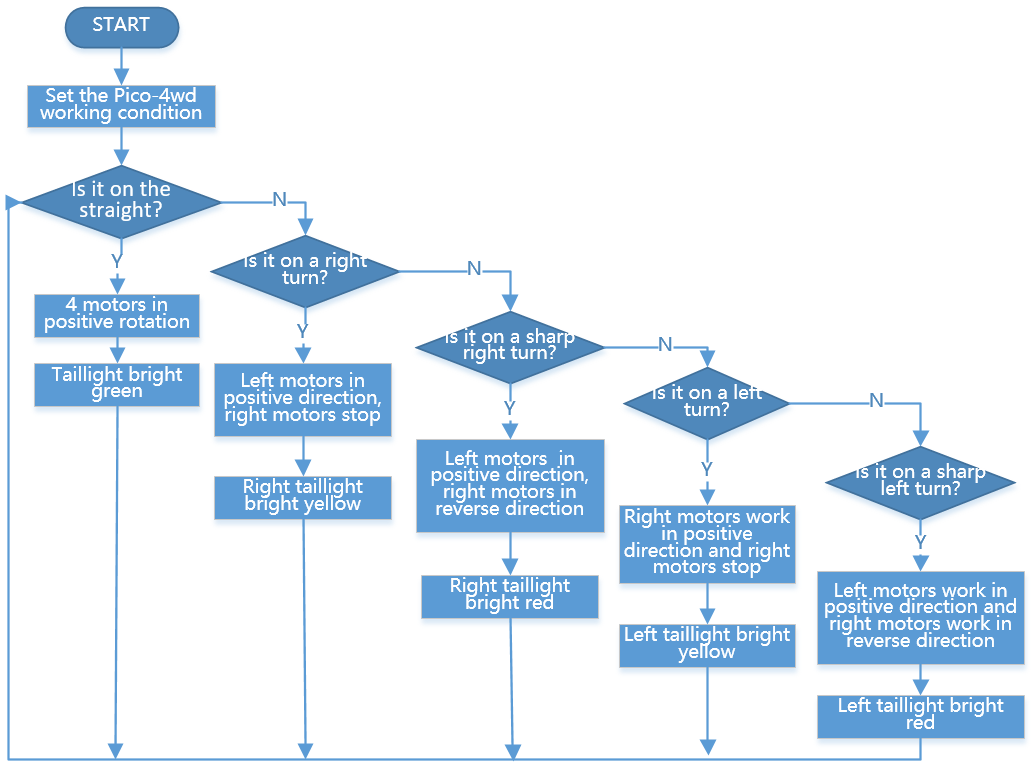
#. Now you can unplug the USB cable, place the car on the taped line, turn on the power switch and it will track the line. The script also includes some lighting effects: when the Pico-4wd is going straight, the taillight (the RGB panel on the tail) will light up green; when turning, one side of the taillight will light up yellow. During sharp turns, one side of the taillight will light up red.
How it Works?