注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[here]をクリックして今すぐ参加しましょう!
サーボ調整(重要)
注釈
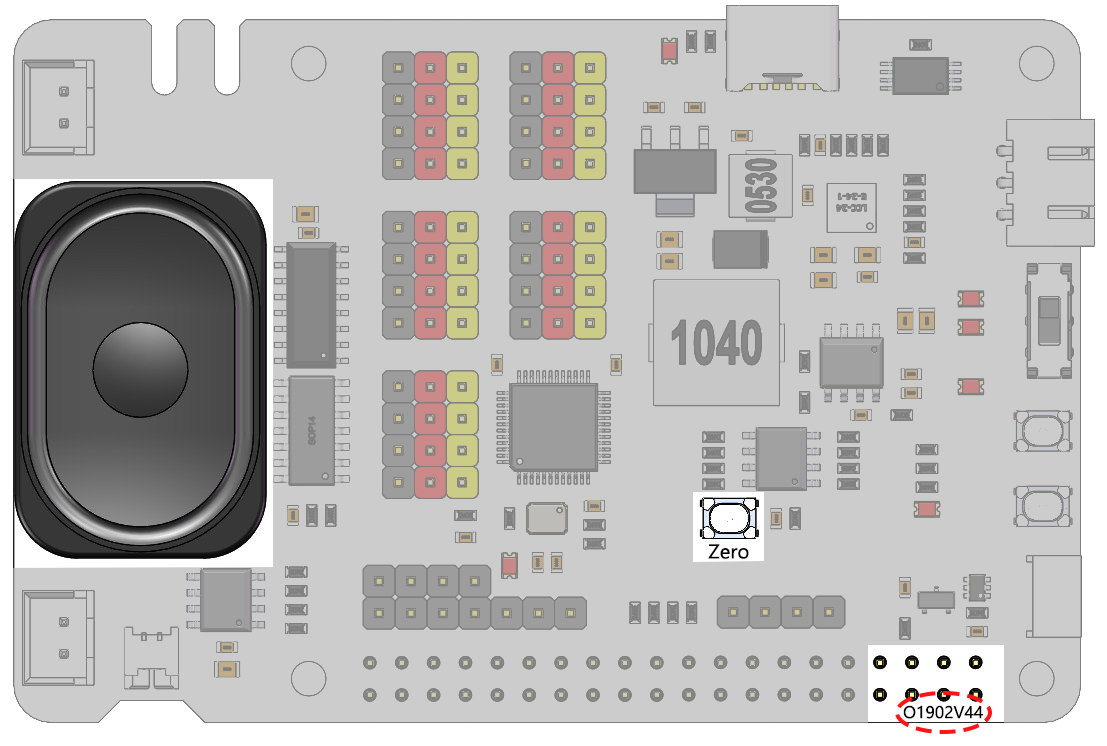
Robot HAT のバージョンが V44 以降 (スピーカーが基板上部にあり、オンボードの Zero ボタンを搭載)の場合は、この手順をスキップできます。 Zero ボタンを押すだけで、サーボのゼロ調整プログラムが実行されます。
サーボの可動角度範囲は -90~90 度ですが、工場出荷時に設定されている角度はランダムで、0° の場合もあれば 45° の場合もあります。 この状態のまま組み立てると、ロボットがプログラムを実行した際に動作が不安定になったり、最悪の場合はサーボがロックして焼損する可能性があります。
そのため、ここでは すべてのサーボ角度を 0° に設定してから取り付ける 必要があります。 こうすることで、どの方向に回転させても、サーボの初期位置が中央になります。
サーボが正しく 0° に設定されていることを確認するため、まずサーボアームをサーボシャフトに差し込み、ロッカーアームを軽く回して別の角度に動かします。 このサーボアームは、サーボが回転していることを目で確認するためのものです。

次に、
example/フォルダ内のservo_zeroing.pyを実行します。cd ~/picar-x/example sudo python3 servo_zeroing.py
続いて、以下の図のようにサーボケーブルを P11 ポートに接続します。 接続すると、サーボアームがある位置まで回転するのが確認できます(これが 0° の位置です。位置はランダムで、必ずしも垂直や平行とは限りません)。

次に、電源を切らず、サーボケーブルを接続したままサーボアームを取り外します。 その後、紙の組み立て説明書に従って作業を続けてください。
注釈
サーボネジで固定する前に、このサーボケーブルを抜かないでください。固定後であれば、ケーブルを抜いても構いません。
通電中にサーボを手で回転させないでください。破損の原因になります。シャフトの角度が合わない場合は、一度サーボを引き抜いてから挿し直してください。
各サーボを組み立てる前に、必ずサーボケーブルを P11 に接続し、電源を入れて角度を 0° に設定してください。